基于自主飞行器的农林植物样本检测系统的设计
2017-06-03 03:26杜雨杭单超颖肖昌明孙杰
电子技术与软件工程 2017年9期
杜雨杭++单超颖++肖昌明++孙杰
摘 要本次项目采用STC89C52单片机作为四旋翼的检测核心,采用STM32单片机作为四旋翼飞行姿态控制核心;采用L3G4200D低功率三轴角速度传感器;采用ADXL345三轴低功率加速度计;采用无刷电机实现飞行功能;采用稳压电源提供电源;实现了四旋翼自主飞行模式,飞行器在飞行过程中实现多角度智能拍摄等控制功能为一体的四旋翼飞行器设计。
【关键词】单片机 四旋翼 航拍
1 引言
随着自动化技术的日益发展,国内外对四旋翼飞行器技术的研究越来越成熟,本应用是对于农林植物样本的检测,四旋翼飞行器除了基本的飞行功能之外还增加了利用温湿度传感器测量农林样本的温湿度,增加摄像功能,能够检测样本的长势,病虫草害分布等较为全面的信息,地面站可以通过四旋翼飞行器携带的无线发射端对四旋翼飞行器进行航线规划,z在要求的地点通过传感器采集温湿度与摄像数据,由无线发射模块发射,地面接收端通过RS232串口将数据传输到计算机。
2 硬件设计
2.1 STM32模块
为了能够对四旋翼飞行器进行良好的控制,需要设计一个高性能的飞行控制模块,因此控制芯片必须满足响应及时、处理能力强、可靠性高等基本要求,即能够快速地响应处理控制信号与传感器信号,并能快速实现控制器的算法。
本文采用了STM32F103系列中等容量增强型微控制器,STM32系列微控制器采用ARM32位的Cortex-M3内核,该内核是ARM公司专为低功耗领域设计的,其优点是低成本、高性能,从而采用低功耗元件从而延长飞行时间,最高可达72MHz运行频率频率,可以进行复杂的运算如单周期惩罚和硬件除法,具有80个快速GPIO接口,可以映射到各个外部中断向量,并且能够接收5V的信号,还具有多个定时器、通信接口,其中包括2个IIC接口,2个SPI接口,3个USERT接口以及CAN接口和USB接口等,能够满足飞行控制模块的基本需求。
2.2 STC89C52单片机
本模块采用STC89C52单片机作为姿态信息处理器。单片机基本系统由最小系统与外围信号I/O口组成,最小系统包括晶振、电源、复位电路。有了以上三块,单片机就能够正常工作了。用单片机作为传感器的控制核心,可以接收到各个传感器的输入信号,并能够通过无线发射端将温度传感器、湿度传感器和摄像头的信号传送给地面计算机。
四旋翼飞行器的控制系统的主控芯片是STM32芯片,处理飞行器的控制算法部分,另一片是STC89C52,主要功能是传感器信号采集和姿态信息处理以及数据的传输。两板之间以串口传输到主控板上,以便于主控板能够具有姿态反馈控制,形成一个闭环反馈系统。
2.3 陀螺传感器
本文采用的是L3G4200D低功率三轴角速度传感器, L3G4200D有两种数字的输出接口IIC/SPI,该陀螺传感器具有16比特率的数据输出和性价比高、体积小等特点。
2.4 加速度计
ADXL345是一款三轴低功率加速度计,其体积小,功耗低,并能检测多种运动状态,通过对比对应轴上的加速度与设置是否存在差异来判别是否运动。并能够检测出来任意方向的单振和多振。还可以检测是否在自由落体的掉落状态。处理器通过中断方式读取数据,为了尽可能提高测量精度,在器件电源处应多使用电容来进行去耦处理。
2.5 温度湿度传感器
DHT11数字温湿度传感器采单总线数据格式,节省I/O端口,其采样周期为1s,其1个管脚与单片机接口连接,可以与单片机进行双向数据传输。通过89C52单片机发送控制信号给传感器进行数据采集,将温湿度模拟信号转化为数字信号传送给单片机,最终发射到地面计算机站。
2.6 摄像模块
本文选择悦翔FPV摄像头。图像清晰细腻,色彩逼真,照度低,宽电压,围攻好,换动态。工作电压:DC12V(宽电压,实测可以7.5-13V正常工作),工作电流:70mA,工作温度:-20-60
2.7 电机选型
本文采用朗宇A2216无刷电机作为四旋翼飞行器的驱动电机。主要考虑了电机的KV值、驱动功率、和重量的综合因素。KV值表示的是无刷电机空转增加的转速值与输入电压的关系。通过实验发现当四旋翼飞行器采用KV值为1000左右的无刷电机驱动螺旋桨时效率较高。
2.8 电机驱动选型
本四旋翼飞行器采用无刷电机驱动,需要选用配套的无刷电机驱动器,无刷电机驱动器电路较复杂并且是三相电机,需要选择最大电压大于11V,最大电流大于13A的驱动器,由于该无刷电机最大功率大,需要选用散热性好的驱动器来降低发热量。本文选用好盈天行者无刷电调,其品质优异并且价格低廉。
2.9 电源模块
本设计中使用3种电源:11V、5V、3.3V。11V用来给电机驱动供电;5V给80C52單片机供电;3.3V给STM32F103系列的微控制器、L3G4200D三轴角速度传感器模块、ADXL345加速度计模块、DHT11数字温湿度传感器供电。采用78L05线性稳压芯片将11.1V的航模电压降到5V,然后用TI公司推出的TPS7333将5V电源降压得到3.3V。
2.10 无线通信模块
本文采用的是nRF24L01无线传输模块,其工作在2.4GHz-2.5GHz的通用ISM频段。传输速率可达1-2Mbps,传播距离为5-1000m,并具有功耗低、成本低、尺寸小的特点。在发射模式下发送-6dBm时电流消耗为9mA,接收模式时为12.3mA,功耗最低。具有CRC校验和内置完整通信协议,还具有自动应答与自动重发的功能,通过SPI接口完成通信,连接到单片机,完成传输过程。
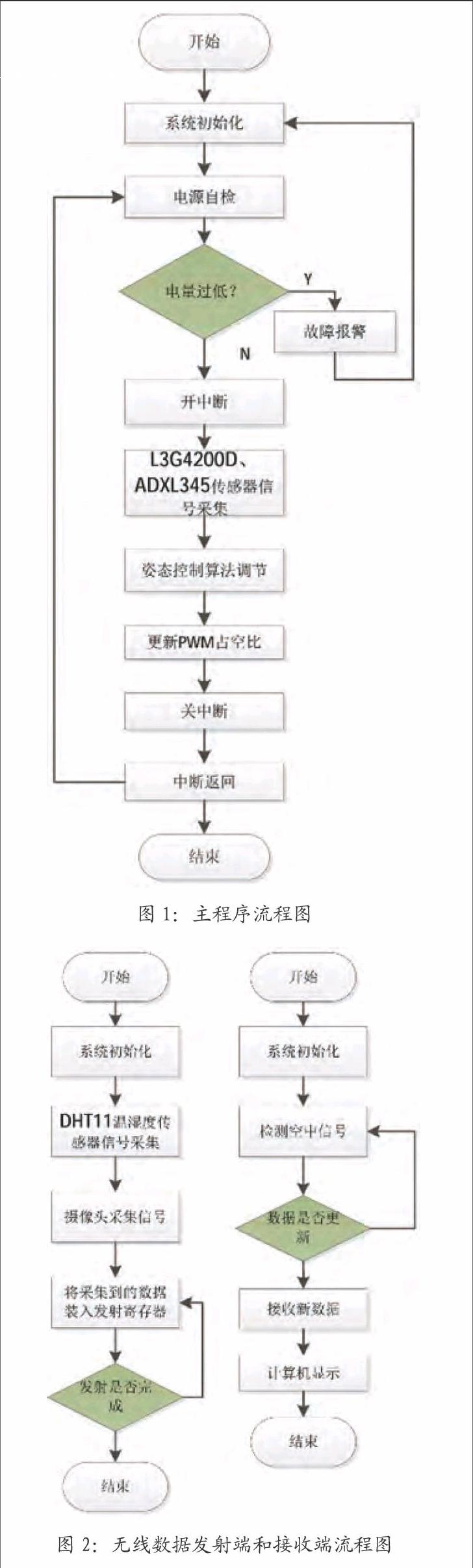
3 软件设计
如图1、2所示。
4 总结
本系统的设计以STM32单片机与STC89C52单片机为控制核心,利用了多种类型传感器,将各种软硬件相结合。本系统能实现如下功能:四旋翼能够平稳起动,按照要求的轨迹进行飞行,稳定降落。四旋翼在飞行中能够传回温度湿度信息,将摄像头采集到的画面通过通讯传输给显示器。
参考文献
[1]江哲.基于STM32的四旋翼飞行器的设计与实现[D].华东理工大学,2015.
[2]段世华.四旋翼飞行器控制系统的设计和实现[D].电子科技大学,2012.
[3]李尧.四旋翼飞行器控制系统设计[D].大连理工大学,2013.
[4]郭凯.基于STM32单片机的四轴飞行器设计及控制技术的研究[D].安徽理工大学,2016.
[5]王福超.四旋翼无人飞行器控制系统设计与实现[D].哈尔滨工程大学,2013.
[6]扈菲菲.农田环境四旋翼UAV信息采集系统及航迹规划研究[D].河南科技大学,2013.
[7]金大鹏.四旋翼无人飞行器控制器的设计与实现[D].东北大学,2010.
作者单位
沈阳城市建设学院信息与控制工程系 辽宁省沈阳市 110000
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
时代邮刊·下半月(2020年9期)2020-09-23
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
金桥(2018年6期)2018-09-22
电子制作(2018年12期)2018-08-01
小学生优秀作文(低年级)(2018年6期)2018-05-19
作文通讯·高中版(2017年6期)2017-07-10
陕西画报(2017年1期)2017-02-11