四轴飞行器自动巡航系统
2017-06-29 09:02西安工业大学樊佳瑞胡心蕊陈泾源
电子世界 2017年11期
西安工业大学 樊佳瑞 胡心蕊 李 杨 陈泾源
四轴飞行器自动巡航系统
西安工业大学 樊佳瑞 胡心蕊 李 杨 陈泾源
本项目主要研究飞行器自主巡航系统,装载此系统后的模型直升机、四轴飞行器、多轴飞行器将会拥有空间定位、低空巡航等功能。它由STM32F407主控模块、GPS模块、气压计模块和磁力传感器模块构成。主控模块将从GPS模 块获得无人机当前坐标信息,从气压计模块得到当前的飞行高度,从磁力传感器模块获得飞行器的实际角度,最后通过算法最终控制飞行器飞到目标空域,实现自动巡航。
STM32F407单片机;GPS;气压计;磁力传感器;无线电遥控
0.引言
四轴飞行器也称四旋翼直升机,通过电力驱动,遥控指挥其飞行的一种飞行器。四个螺旋桨对称分布在机体的前后左右,并且处于同一高度平面。四个螺旋桨形状大小相同,四个电机位于飞行器的支架末端,支架中间位置可安放电池,控制器及其他设备。四旋翼飞行器可实现垂直,俯仰,滚转,偏航,前后及侧向运动,与常规飞行器相比,结构更加稳定,能获得比普通飞行器更大的上升力,便于控制,工作效率大大提高。具有自动巡航的四旋翼飞行器在军事和生活方面应用广泛,例如无人机侦察、制导、空中打击、自动化武器、航拍航测、高压线巡航、治安防爆、地质勘探、林业部门防火、抢险救灾、国土资源管理、生态环境保护、城镇规划与市政管理等。
1.系统总体方案设计
整个系统由PC机、航模遥控器、和四轴飞行器组成。研究人员通过PC机上的地面站软件规划巡航路线,并将巡航路径数据下载到自主巡航控制模块。飞行器在巡航过程中遇到难以处置问题时,可以切换到遥控模式以免发生危险。四轴飞行器使用11.1V的锂电池进行供电,从GPS模块和气压计模块得到飞行器的具体坐标及飞行高度,通过3DR模块进行数据的传输,保证了飞行器稳定的数据传输,并将数据显示在PC机上的地面站监控软件上,这样便可实现了人机交互的时效性和准确性。四轴飞行器的控制系统由STM32F407主控模块、GPS模块、气压计模块、磁力传感器模块、控制选择器和APM飞控构成,主控模块将从GPS模块、气压计模块和磁力传感器模块获得无人机当前坐标信息,然后通过控制算法将控制信号传递到APM飞控,最终实现飞行器的自主巡航。
以下是功能框架图:

图1 系统原理框图
2.系统的硬件设计
2.1 自动飞控系统
自主飞控系统功能是在无人操控的状态下,控制飞行器在预设的坐标点之间巡航。要完成这个功能就需要多个模块的互相配合,才能完成给定的任务。系统采用高精度GPS模块通过串口获取经纬度数据,在巡航过程中系统需要不断调整飞行姿态,所以利用气压计采集飞行器的飞行高度,用磁力传感器获得飞行器的偏航角,这两个模块都是采用I2C驱动程序与主控芯片进行通信,以下是自动飞控系统的硬件框图:
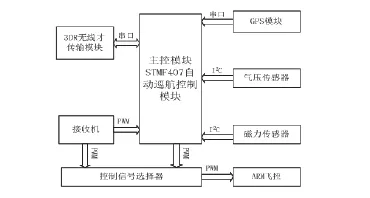
图2 系统硬件框图
2.2 STM32F407主控模块
因为控制芯要计算偏航角并进行PID控制,所以对主控芯片的运行速度要求比较高,通过查询资料最终选择STM32F407为主控芯片。STM32F407系列基于最新的ARM Cortex M4内核,在现有出色的STM32微控制器产品组合中新增了信号处理功能,并提高了运行速度;STM32F405x集成了定时器、3个ADC、2个DAC、串行接口、外存接口、实时时钟、CRC计算单元和模拟真随机数发生器在内的整套先进外设。

图3 选择控制器硬件电路

图4 GPS模块硬件电路
2.3 控制选择器
控制选择器由CD4053芯片、主控模块以及必须元器件构成。遥控器产生开关信号,通过接收机产生PWM信号并传输到主控模块,单片机对PWM信号进行检测。通过对PWM信号高电平的检测,得到PWM信号的占空比。当占空比大于0.90时单片机输出高电平,选通CD4053芯片的x通道关闭y通道,从而实现STM32F407核心控制器对四轴飞行器的控制;当占空比小于0.5时单片机输出低电平,选通CD4053芯片的y通道关闭x通道,从而实现遥控器对四轴飞行器的控制(见图3)。
2.4 GPS模块
四轴飞行器实现自主巡航需要高精度的GPS模块提供经纬度数据,在考察了市面上的定位芯片后,我们选用的是NEO-7M GPS模块,它是一个低功耗主芯片的超小外型GPS接收模组,该产品采用了新一代U-blox芯片,超高灵敏度,具备全方位功能,能满足专业定位的严格要求,串口输出数据用户使用方便,而且成本较低(见图4)。
2.5 气压计模块
气压计模块用来测量飞行器的高度,我们选用的是MS5611-o1BA气压传感器,它是由MEAS(瑞士)推出的一款SPI和I²C总线接口的新一代高分辨率气压传感器,分辨率可达到10cm,该传感器模块包括一个高线性度的压力传感器和一个超低功耗的24位Σ模数转换器,具有高稳定性以及非常低的压力信号滞后。

图5 气压计硬件电路

图6
3.系统的软件设计
3.1 偏航角计算理论方法
如图6所示以A点为参考点计算B点的方位角,假设A点经纬度坐标为(Aw,Aj) , B点经纬度坐标为(Bw,Bj)。A,B,C表示球面上的三个点及球面上“弧线”在该点处所夹的角。a,b,c表示A,B,C三点的对“弧”两端点与地心连线所夹的角。
首先使用三面角余弦公式:

将两点的经纬度数据带入得:

由三角函数得:

地球近似一个球体,所以采用用球面正弦公式:

将已知条件带入化简得:

即得偏航角:

3.2 STM32软件流程图
智能控制系统的软件是整个系统中最重要的部分,也是最难的部分。系统在接受到地面站发送的坐标信息后进行存储,并用方向余弦算法计算出当前位置到目标点的偏航角,自动巡航控制器将控制四轴飞行器起飞,不断调整四轴飞行器的飞行高度和偏航角,当飞行器的飞行高度达到预设值高度,实际偏航角等于计算的理论值时,飞行器开始飞向目标航点,在飞向目标航点的过程中,控制器将会不断执行上述过程调整飞行器姿态,这样即使在有风力干扰时飞行器也会自行修正航向,大大提高了自主巡航系统的抗干扰性。以下是系统的软件流程图:

图7 STM32F407软件流程图
4.测试结果
以下是我们对四轴飞行器自主巡航系统的测试结果:

目标航点坐标飞行器降落点坐标偏差量34.3841040 N 108.9831048 E 34.3841192 N 108.9831367 E 1.2m 34.3853099 N 108.9837671 E 34.3853461 N 108.9837326 E 0.9m 34.3852763 N 108.9831795 E 34.3852895 N 108.9831467 E 1.4m 34.3841509 N 108.9836924 E 34.3841316 N 108.9836593 E 1.0m 34.3846871 N 108.9834092 E 34.3846612 N 108.9834398 E 0.8m
5.总结
本文说明了四轴飞行器自主巡航系统的软硬件实现方案。运用模块化的硬件电路设计方式,使得本系统具有出色的再开发性和外扩性。选用STM32F407为主控制器,具有高效的计算能力及多个外设接口,为四轴提供了一个强大的大脑,罗盘HMC588L,气压计MS5611,和NEO-7M GPS,保证飞行器稳定飞行;预设许多接口,以便再次开发与拓展。本文设计的四轴飞行器具有编程步骤容易、便利操纵,稳固性好、拓展性强等优势。经过实验,成功完成四轴飞行器固定高度下的自主巡航。
[1]彭军桥.非共轴式碟形飞行器研究[D].上海大学,P:1-68.
[2]李俊峰,张雄.理论力学[M].第二版,北京:清华大学出版社,2010: 213-216.
[3]杨明志,王敏.四旋翼微型飞行器控制系统设计[J].计算机测量与控制,2008,16(4):485-490.
[4]谢克明.现代控制理论基础[M].北京大学出版社,2002.
[5]叶金虎.无刷直流电动机[M].科学出版社,1982.
[6]周立功等.ARM嵌入式系统基础教程[M].北京航空航天大学出版社,2005.
[7]白立群,李成铁,周剑峰.基于STM32的飞行控制器系统设计[D].东北大学秦皇岛分校,2013.
[8]刘杰.四轴飞行器的研究与设计[D].南京邮电大学,2013.
[9]程学功.四轴飞行器的设计与研究[D].杭州电子科技大学,2012.
[10]Altug E,Ostrowski J P,Mahony R.Control of a quadrotor helicopter using visual feedback[C].Proceedings of the 2002IEEE International Conference on Robotics & Automation,Washington DC,2002:72-77.
樊佳瑞(1996—),男,甘肃宁县人,西安工业大学电子信息工程学院本科在读,主要从事嵌入式系统研究。
猜你喜欢
作文小学中年级(2023年1期)2023-02-12
小学科学(2022年23期)2023-01-30
气象水文海洋仪器(2022年2期)2022-07-08
凤凰动漫(军事大王)(2022年1期)2022-04-19
格言·校园版(2021年22期)2021-09-27
自动化与仪表(2019年8期)2019-09-03
电子制作(2019年9期)2019-05-30
电子制作(2018年2期)2018-04-18
思维与智慧·下半月(2017年12期)2017-12-25
小朋友·快乐手工(2015年5期)2015-06-06