新型张环式超越离合器的工作原理及自锁与超越条件
2017-07-03 16:02彭斯洋宋泽良吴振宏1制造装备机构设计与控制重庆市重点实验室重庆400067重庆理工大学机械工程学院重庆400054
中国机械工程 2017年12期
杜 力 彭斯洋 魏 东 宋泽良 吴振宏1.制造装备机构设计与控制重庆市重点实验室,重庆, 400067.重庆理工大学机械工程学院,重庆,400054
新型张环式超越离合器的工作原理及自锁与超越条件
杜 力1,2彭斯洋2魏 东2宋泽良2吴振宏2
1.制造装备机构设计与控制重庆市重点实验室,重庆, 4000672.重庆理工大学机械工程学院,重庆,400054
提出一种新型张环式超越离合器,其自锁构件呈环状,与输出构件成低副面接触,与传统的高副式超越离合器相比承载能力有所提高。对该张环式超越离合器自锁及超越条件进行分析,并研究了其自锁条件对滚柱磨损的敏感性,研究表明,在该项性能上该超越离合器优于滚柱式超越离合器。最后对新型张环式超越离合器进行了仿真及实验验证。
张环式超越离合器;低副面接触;自锁及超越条件;仿真及实验
0 引言
超越离合器是随输入、输出构件的相对转速或相对旋转方向变化能够自行离合的一类机械式离合器,在纺织、化工、矿山机械、汽车、船舶、航天等诸多领域应用广泛[1]。由于超越离合器特殊的使用要求与功能特征,其工作环境往往是机械系统中最恶劣的,这就使其成为整个机械系统的一个薄弱环节,因此超越离合器的性能好坏对整机系统的工作可靠性、传动效率以及使用寿命等起着决定性的作用[2]。
目前应用最广泛的超越离合器主要是滚柱式和楔块式超越离合器。滚柱及楔块与内外环均成高副接触状态,其承载能力、效率、对滚柱及楔块的磨损敏感性等综合性能不甚理想[3-4]。
文献[5-6]分别在滚柱式和楔块式超越离合器的基础上进行了低副化改造,得到了全低副滚柱式和楔块式超越离合器。这些低副化改造是通过在滚柱和芯轴之间增加弧块以及在楔块与外环之间增加异形弧块来实现的,从而使超越离合器具有全低副式的结构,在一定程度上提高了超越离合器的承载能力,但依然存在缺陷:一是使得超越离合器的结构复杂程度增加,制造成本上升;二是改造使得超越离合器的径向尺寸增大,从而导致其结构不够紧凑;三是由于弧块的质量及弹性元件的刚度等因素,在高频(一般为25 Hz及以上)等应用条件下,超越离合器的开合特性反而有所下降[2],并且对磨损和制造误差的敏感性依然没有显著降低。
国外对超越离合器的研究起步较早,并且大都为实际应用研究。LIU等[7]考虑滚柱变形等因素,分析了滚柱式超越离合器的滑动摩擦原理与摩擦因数的分布,为滚柱式超越离合器的能耗分析、动力学分析及优化设计提供了理论依据;CHEON[8]通过研究,证实了超越离合器对齿轮传动过程中的非线性扭转振动具有一定的削弱作用。
本文在总结前人研究成果的基础上,开发了一种承载能力强、工艺性优良、响应灵敏的新型超越离合器——张环式超越离合器。
1 张环式超越离合器的工作原理
1.1 张环式超越离合器结构及工作过程

1.外环 2.左环 3.芯轴 4.弹簧顶销 5.滚柱 6.右环 7.转动销图1 张环式超越离合器结构简图Fig.1 The structure sketch of expanding-ring type overrunning clutch

图2 张环式超越离合器控制构件结构简图Fig.2 The structure sketch of control link of expanding-ring overrunning clutch
张环式超越离合器的总体结构如图1所示,主要由外环1、左环2、芯轴3、弹簧顶销4、滚柱5、右环6、转动销7等组成,其中,芯轴为输入构件,外环为输出构件,左右环为自锁构件,滚柱为控制构件。右环的包角由开口量E(图2)的取值决定,左右环通过转动销7连接,左右环的厚度相等且与滚柱直径相等,转动销中心处于左右环连接处倒圆中心位置。左右环外圆面与外环内表面、左右环内圆面与芯轴的外圆面均取间隙配合,考虑到内外环对超越离合器响应的影响,间隙过大,响应会较慢,但若采用过度配合,由于过度量有可能会出现过盈配合,导致因过盈效应而不能响应,所以,选择内外环为间隙量为0的间隙配合。
张环式超越离合器工作过程如下:
当外环静止,芯轴沿图1所示结构逆时针旋转,或者芯轴相对于外环有逆时针相对旋转趋势时,为超越离合器的正向工作过程,其正向工作过程分为楔紧、接合和稳定运行三个阶段。此时弹簧顶销的作用力远小于滚柱与左右环及芯轴的作用力,可忽略不计。芯轴首先带动滚柱与左右环两端接触并使其有张开的趋势,消除滚柱与左右环之间以及左右环与外环之间的间隙使之与外环成面接触,此为楔紧过程,合理设计弹簧顶销的预紧力可加快此过程;然后,由于通过转动销7连接的左右环受力情况均满足自锁条件,使外环与左右环自锁,但由于外环的速度小于芯轴的输入转速,因此外环有一个加速的过程,并最终与芯轴转速相等,此为超越离合器的接合行程;当外环、左右环、芯轴等的转速相等时,超越离合器的各构件等速转动,超越离合器进入稳定运行阶段。
当外环静止,芯轴沿图1所示顺时针方向旋转,或者芯轴相对于外环顺时针旋转时,为超越离合器的反向超越过程。此时,滚柱的受力状态发生改变,表现为:①滚柱与芯轴的接触表面脱离,此时滚柱的受力状态变为滚柱与顶销以及左右环两端压力;②左右环松紧端发生变化。在此条件下环的两端受力不满足自锁条件,离合器不能自锁,左右环在外环的内表面发生打滑,运动停止,此为超越离合器的超越行程。
1.2 张环式超越离合器自锁数学模型建立
超越离合器在接合状态时要求构件不出现强度破坏的前提下,输入输出构件都必须保持接合状态,且这种接合状态不依赖外力形成的摩擦力矩,故其工作原理必然是自锁[9]。
如图1所示,取左右环任意一块(后文称之为刚环)进行分析,从机构运动副的角度看,刚环与外环之间为面接触状态,相对运动姿态为转动,封闭形式为力封闭(两端压力),其基本运动副关系为转动副。
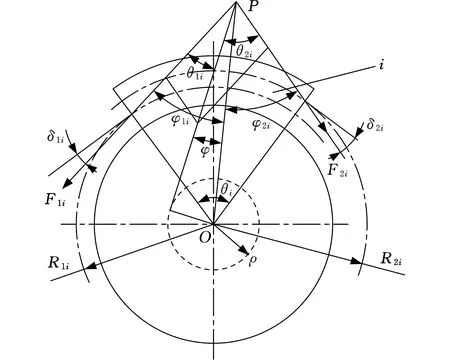
图3 张环式超越离合器基本模型Fig.3 Basic model of expanding-ring type overrunning clutch
可见,张环式超越离合器的自锁是转动副的自锁,结合转动副的自锁原理,要求各个刚环所受合力位于摩擦圆以内,对任意一块刚环i可建立图3所示的力学模型,求解可得其自锁的数学模型如下:
(1)

(2)

(3)
(4)
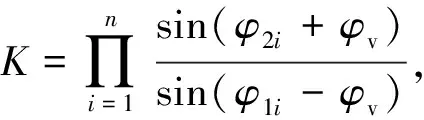
式中,F1i、F2i分别为第i块刚环两端实际所受的力;R为外环的内半径;F11、F2n分别为n块首尾相连的张环式超越离合器的第1块刚环首端实际所受的力和第n块刚环尾端实际所受的力;R1i、R2i分别为刚环两端受力位置半径;δ1i、δ2i分别为刚环两端理论上所受力与实际所受力之间的夹角;φ1i、φ2i为摩擦角;μv为当量摩擦因数;θi为刚环的包角。
结合张环式超越离合器的工作原理可知:在张环式超越离合器的工作过程中其正向行程要求自锁,故其自锁深度应小于等于自锁阈值;反向行程要求避免自锁,故其自锁深度大于自锁阈值。
1.3 张环式超越离合器的自锁条件
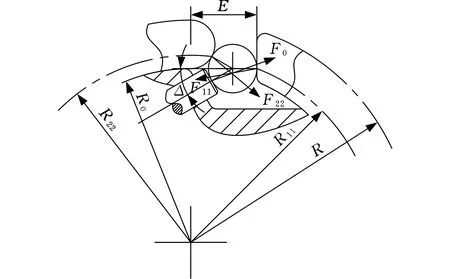
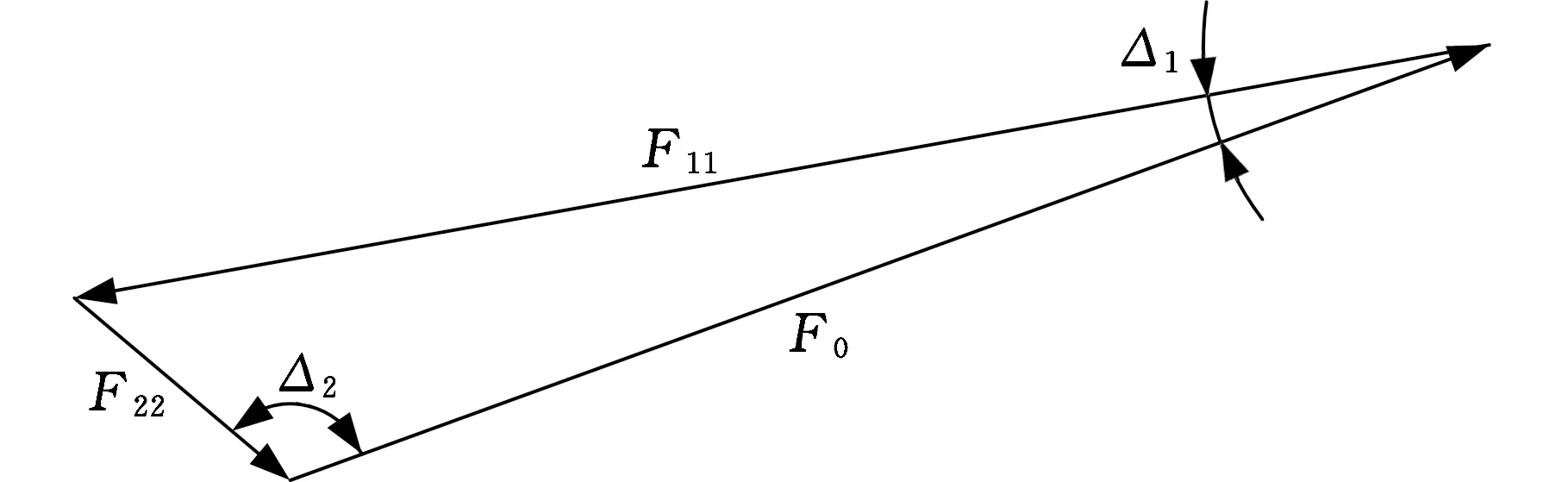
由式(1)~式(4)知,求取张环式超越离合器的自锁条件的关键在于分别求解其自锁阈值与自锁深度,如图4所示,分别建立自锁构件与控制构件的力学模型。根据图4中的力学模型再结合式(1)~式(4),可求解张环式超越离合器的自锁条件:
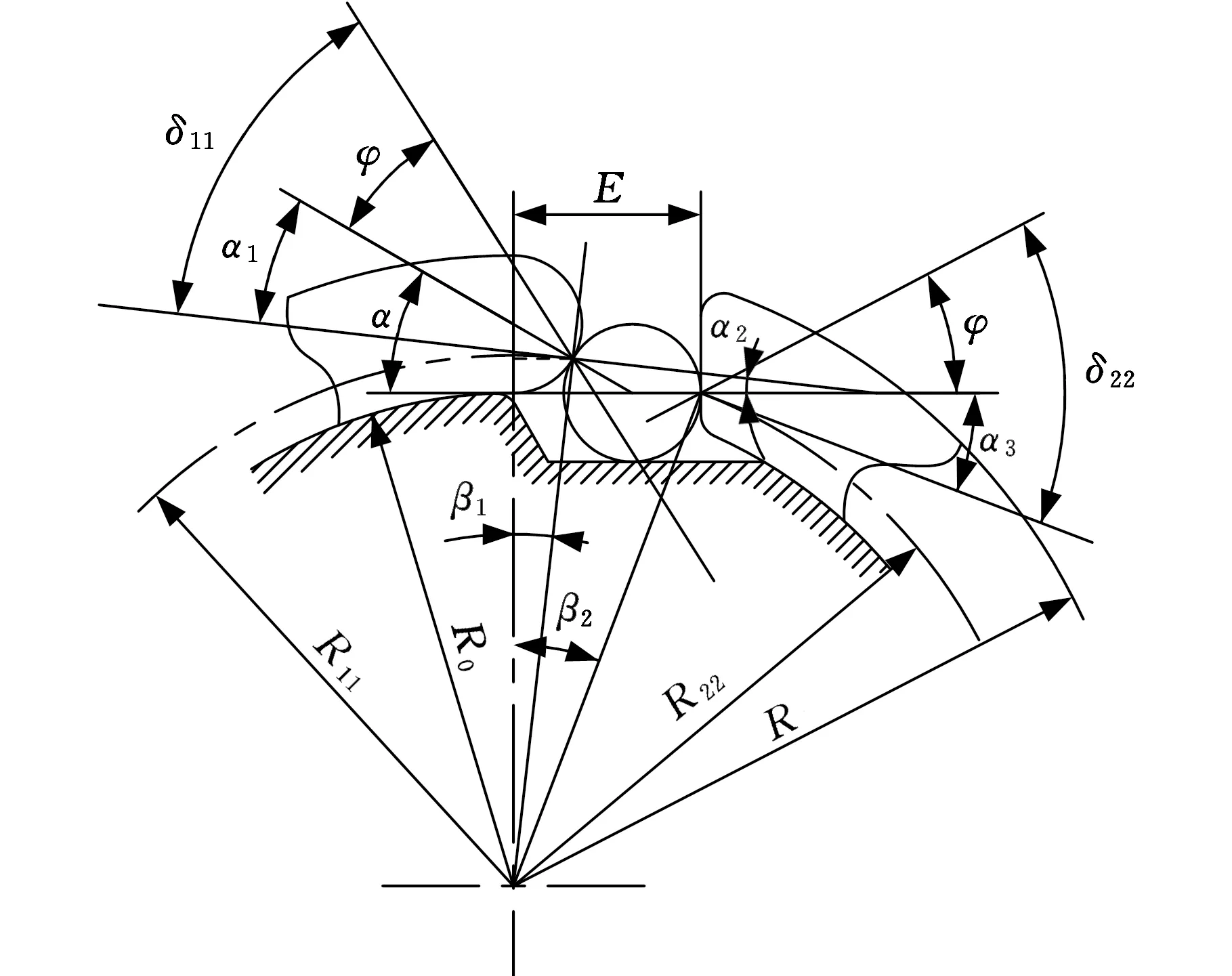
图4 自锁状态下自锁阈值的计算模型Fig.4 The computation model of self-locking threshold in self-locking condition
(5)
α1=α-α2=α-β1
(6)

(7)

(8)

(9)

(10)
δ22=α3+φ=α3+arctanf
(11)
(12)
(13)
R12=R21=R0+r12
(14)
(15)
δ12=δ21=0°
(16)
θ1=π+β1
(17)
θ2=π-β2
(18)
式中,f为静摩擦因数;r12为滚柱半径(左右环厚度的一半);R0为芯轴半径;φ为摩擦角;α为楔角。
通过式(5)~式(18)求解出式(1)~式(4)的相关参数,再将计算出的参数代入式(1)~式(4)中,根据1.2节中的自锁阈值K的计算公式,就可以求得自锁阈值。
图5 自锁状态下自锁深度的力学模型Fig.5 The model of mechanics of self-locking depth inself-locking state
根据1.2节的分析,结合图5的力学模型可知,自锁深度的计算公式为

(19)

综上可知:当内外环尺寸一定时,自锁阈值及自锁深度都是开口量E的函数。为验证上述结论,以初始条件R0=43 mm、R=55 mm进行计算机求解,可分别得到自锁阈值及自锁深度随开口量E(该条件下为保证滚柱与右环的竖直端面接触,开口量应满足15.2 mm≤E≤17.9 mm)的变化关系,如图6所示,当15.2 mm≤E≤17.9 mm时,该超越离合器自锁深度始终小于自锁阈值,说明在该范围内均能够可靠自锁,这能大大减小该超越离合器的加工制造难度,也是该超越离合器结构的一个优势所在。
图6 某初始条件自锁状态下自锁阈值与自锁深度变化曲线Fig.6 Curves of self-locking threshold and self-locking depth under self-locking condition of initial condition
此结构的另外一个优势是自锁条件对滚柱磨损的敏感性较低。众所周知,超越离合器能正常工作的首要条件是自锁可靠,而传统的滚柱式超越离合器自锁失效最常见的原因是滚柱的磨损[10],由张环式超越离合器的结构可知,其最容易磨损的构件也是滚柱,图7所示为张环式及滚柱式超越离合器自锁裕度[10]随滚柱磨损的变化曲线。

1.张环式超越离合器 2.滚柱式超越离合器图7 滚柱磨损对两种超越离合器自锁裕度的影响Fig.7 The influence of roller wear on self-locking margin of two overrunning clutch
自锁裕度以W表示,其中,张环式超越离合器的自锁裕度为

滚柱式超越离合器的自锁裕度为

显然,W>0时离合器能自锁,W=0时离合器处于自锁的临界状态,W<0时离合器将不能自锁。
由图7可见,张环式超越离合器的自锁裕度在磨损量Δr为0~0.8 mm的范围内呈先减小后增大的变化趋势,在磨损量约为0.534 mm时达到最小值,自锁裕度约为13.01%,但仍大于0,可见在此范围内超越离合器仍能自锁可靠工作。滚柱式超越离合器的自锁裕度在此磨损量范围内呈单调递减的变化趋势,并在滚柱磨损量约为0.584 mm时,自锁裕度等于0,若磨损量继续增大,自锁裕度将降至0以下,自锁失效,超越离合器将不能自锁可靠工作。对比曲线1和曲线2,张环式超越离合器的自锁裕度在磨损量0~0.8 mm范围内的变化幅度远小于滚柱式超越离合器自锁裕度的变化幅度,同时,张环式超越离合器的自锁裕度始终大于0,可见张环式超越离合器的自锁条件对滚柱制造误差或磨损的敏感性相比于滚柱式超越离合器有一定的下降。
1.4 张环式超越离合器的超越条件
自锁发生的必要条件是存在摩擦,因此当摩擦力消失时,自锁也就解除。传统的环式超越离合器均采用将反向行程中的正压力反向的方法达到超越的目的[11-12]。而张环式超越离合器的超越原理则完全不同,其自锁构件与外环成转动副状态,只要反向时自锁深度k(即左右环两端的受力之比)大于自锁阈值K(即自锁临界状态左右环两端受力之比),则左右环两端作用力的合力方向矢量就位于摩擦圆以外,超越离合器不能自锁,此时其输入和输出构件的运动自锁关系被断开,从而也能达到超越的目的。此时左右环与外环的接触并未脱离,但输入的运动并不能使外环同步运动,也能达到超越的目的,这对简化结构是有积极意义的。如图8所示,建立超越状态力学模型,可求解得到其超越条件。
(a)控制构件结构简图

(b)弹簧顶销的力学模型
(c)弹簧顶销受力分析矢量图图8 超越状态力学模型Fig.8 The mechanical model of transcendental state
根据图8所示的力学模型求解可得:当内外环尺寸及开口量大小确定时,自锁阈值确定,而自锁深度是弹簧顶销位置(通过弹簧顶销轴线与过芯轴的切线所成角度Δ来表示)Δ的函数,以初始条件R0=43 mm、R=55 mm、E=16.4 mm进行计算机求解,求解结果如图9所示,可以看出,自锁阈值为定值,而自锁深度呈先增大后减小的趋势,在Δ=2arctanf时取得极值,且当0≤Δ<30.6°时,自锁深度大于自锁阈值,可见超越离合器在此初始条件下超越条件为0≤Δ<30.6°,其超越条件范围较宽,这对弹簧顶销的结构及安装有积极的意义。
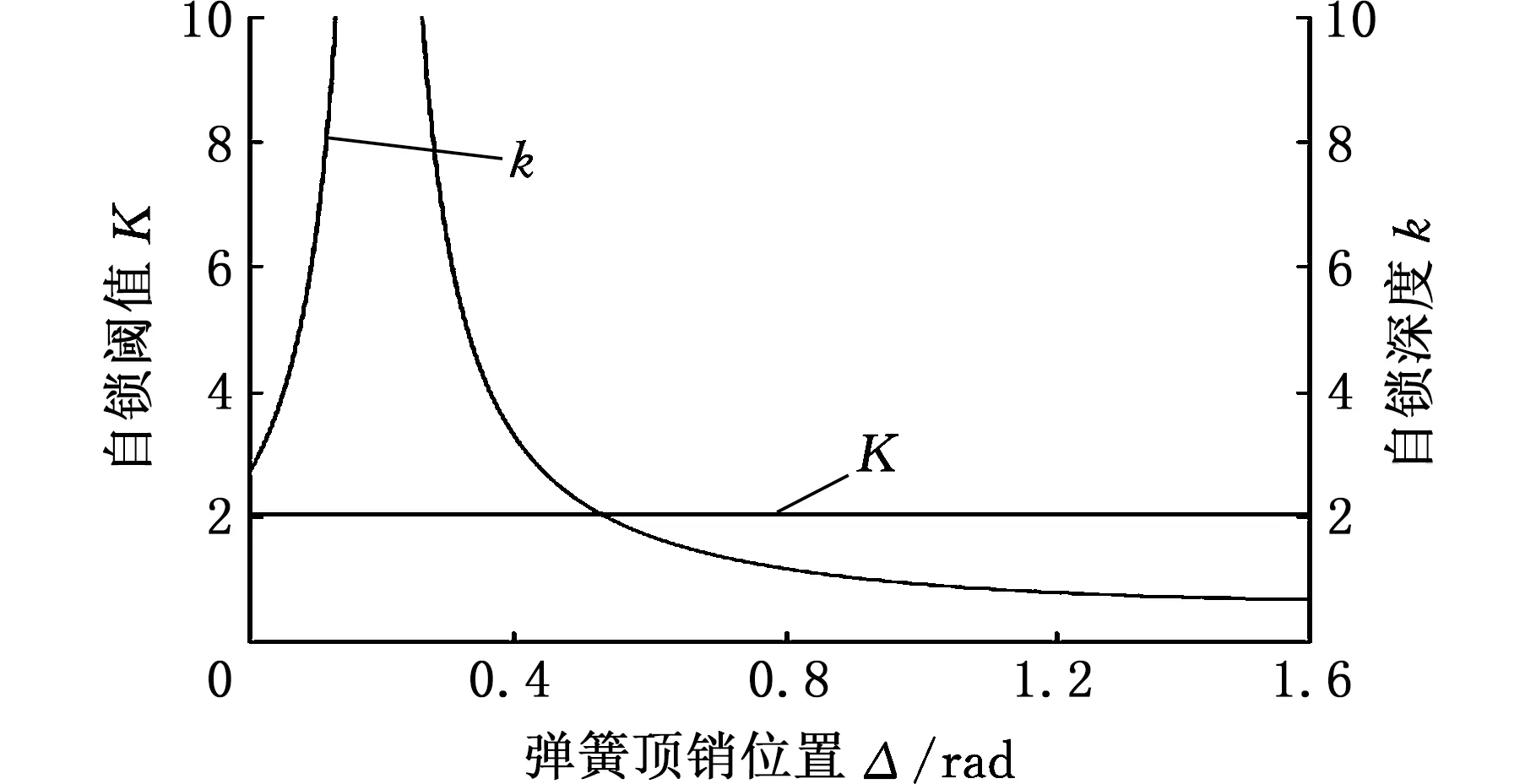
图9 某初始条件超越状态下自锁阈值及自锁深度变化曲线Fig.9 Curves of self-locking threshold and self-locking depth under transcendental state of initial condition
2 仿真实例与样机试验
为验证张环式超越离合器自锁及超越条件数学模型的正确性,在ADAMS仿真平台下,对其进行运动学仿真。表1所示为仿真模型基本结构及材料参数,仿真模型如图10所示,仿真结果如图11及图12所示。
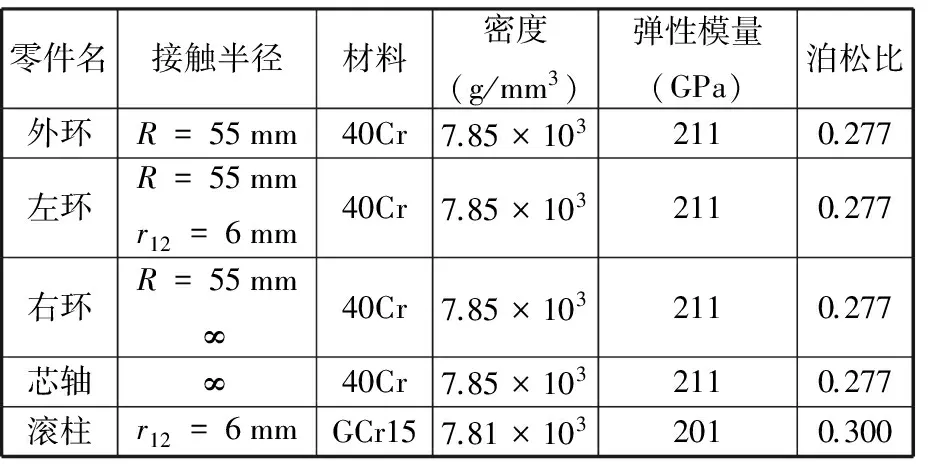
表1 仿真模型基本尺寸及材料属性
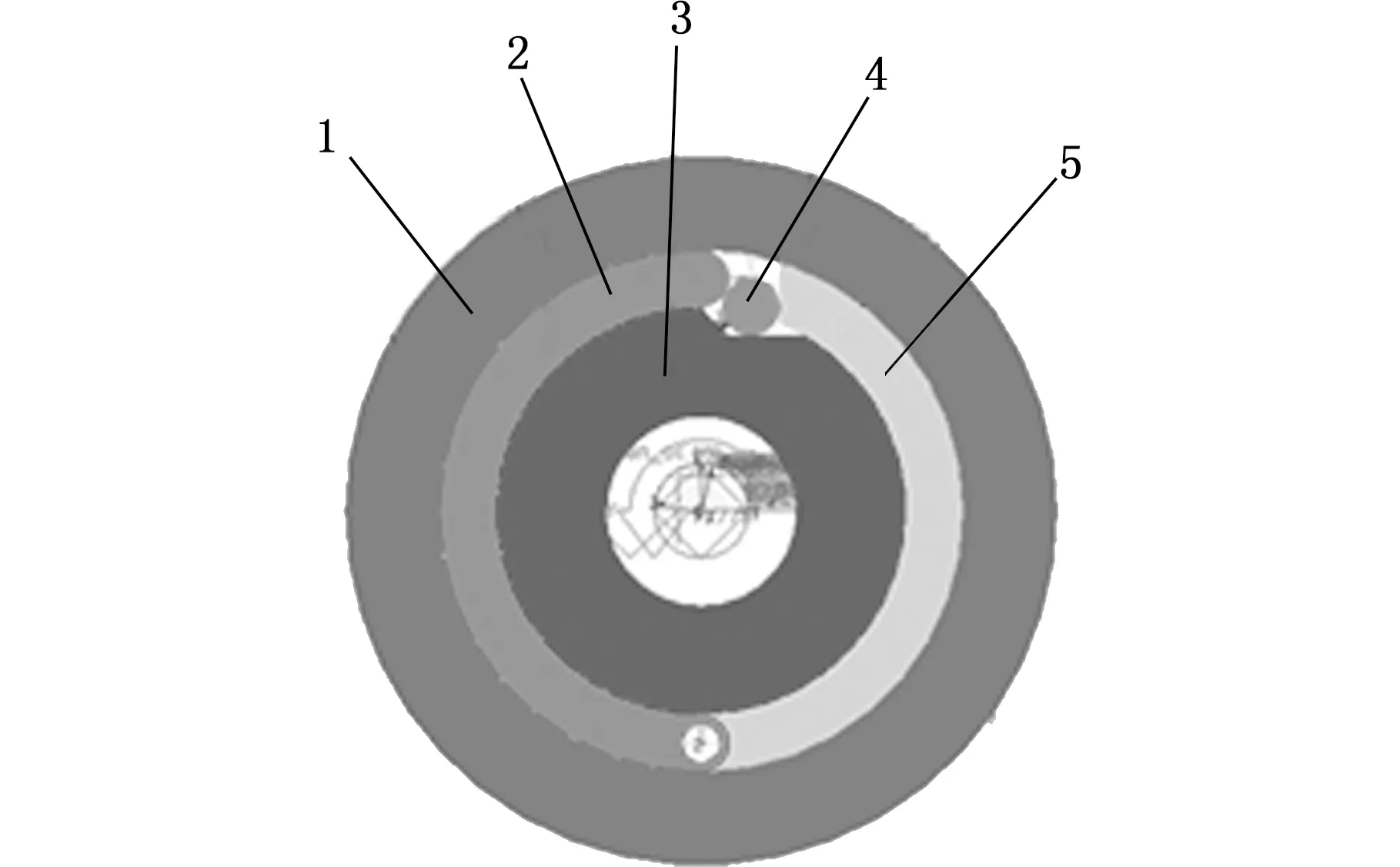
1.外环 2.左环 3.芯轴 4.滚柱 5.右环图10 张环式超越离合器仿真模型Fig.10 Simulation model of expanding-ring type overrunning clutch
图11所示为 0.2 s内滚柱位移的变化情况,超越离合器进入自锁状态明显分为几个不同的阶段:ab段对应于压紧并消除间隙的过程,由两段线性过程组成,前半段对应于滚柱与左右环间隙消除的过程,后半段对应于左右环与外环间隙消除的过程;在bc段,滚柱的位移有小范围内减小的趋势,是间隙消除后开始碰撞的初始阶段,此过程中芯轴与外环之间有较大的相对滑移;cd段,滚柱的位移发生剧烈的变化,且最大值超过了最终的位移值;de段为一非线性过程,滚柱的位移陡然减小,滚柱发生回弹,滚柱存在较大的冲击,这对超越离合器的使用寿命是非常不利的;ef段也为一非线性过程,滚柱的位移增大到最终值;在f点后,滚柱的位移不再发生变化,超越离合器自锁。
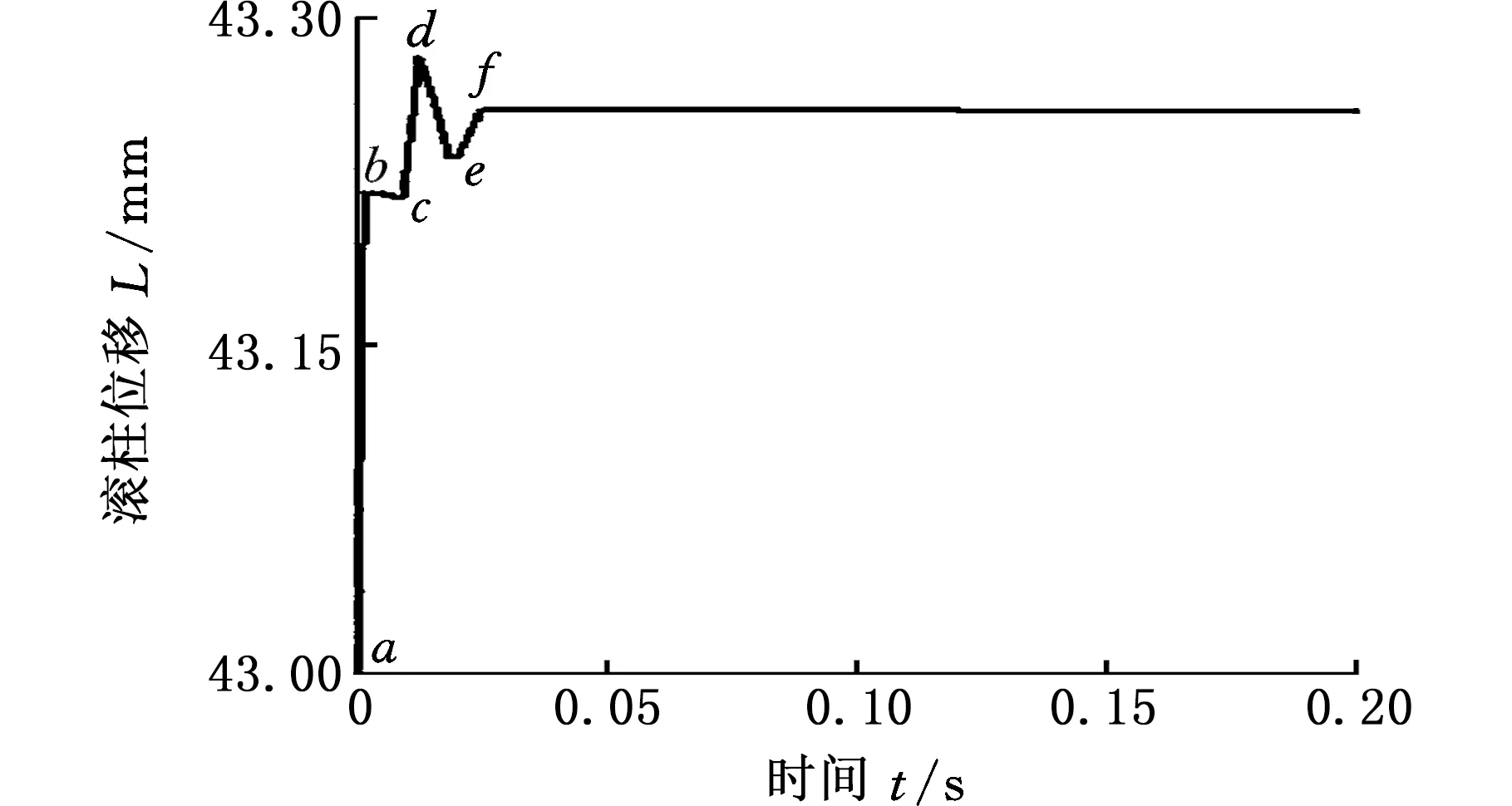
图11 正向行程滚柱的位移曲线Fig.11 The displacement curve of roller in forward stroke
超越行程滚柱的位移曲线如图12所示,由图可见,滚柱的位移发生往复变化,且随着时间的延长,这种往复变化越来越快,滚柱处于不断加速的状态,说明此时左右环与外环的自锁关系解除,超越离合器发生了超越。
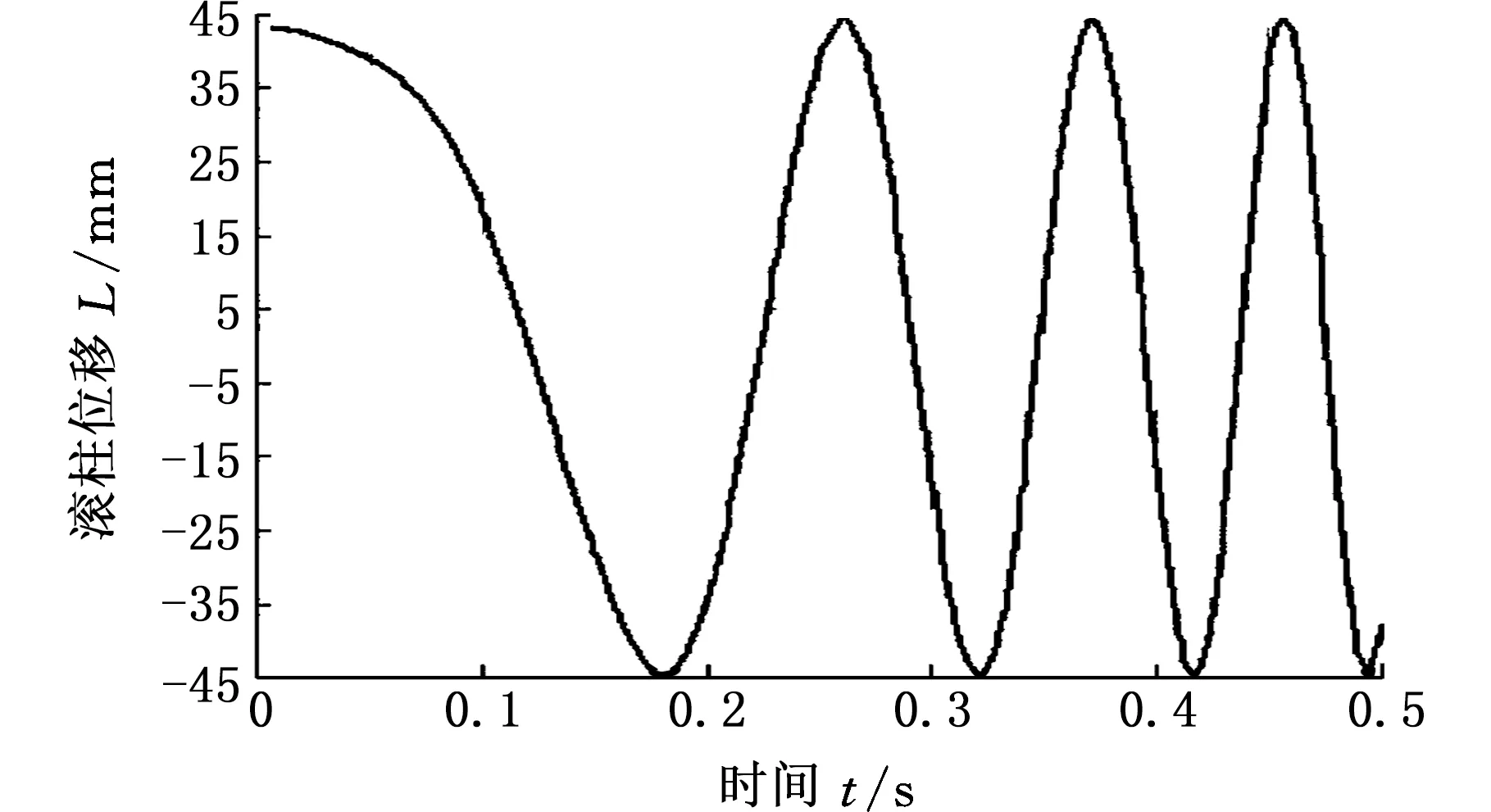
图12 超越行程滚柱的位移曲线Fig.12 The displacement curve of roller in transendental stroke
为进一步验证张环式超越离合器自锁及超越条件数学模型的正确性,并验证其自锁条件对滚柱磨损的敏感性,加工出样机(图13)并进行实验。如图13所示,分别在干摩擦、润滑油润滑及脂润滑条件下对样机进行实验,反复实验证明:张环式超越离合器自锁及超越均较为可靠,使用过程中不同的润滑条件对其综合性能有一定的影响,干摩擦状态下自锁响应较快,但超越工况效率较低;润滑油润滑状态下,响应速度与效率均较高,但需连续供油;而脂润滑状态虽不需要连续供油,但响应灵敏度显著降低。可见,张环式超越离合器自锁及超越条件数学模型正确,而使用过程中应尽量在有连续润滑油供给的油润滑条件下使用。

图13 实验样机Fig.13 Experimental prototype
如图14所示,为模拟滚柱的制造误差及磨损量,加工出一系列不同尺寸的滚柱,并将这些滚柱一一与张环式超越离合器装配并实验。根据所加工的样机的尺寸,理论研究的允许的磨损量范围为0~0.8 mm,所以加工的滚柱半径偏差范围为0~1 mm。实验结果显示,在滚柱磨损量为0~0.75 mm的范围内,超越离合器仍能自锁,而超过0.75 mm后不能自锁,这是因为前文研究没有考虑零件材料的弹性变形及左右环与外环的配合间隙。而对比同尺寸下的滚柱式超越离合器,其理论最大允许磨损量为0.580 mm,可见张环式超越离合器具有相当优势。
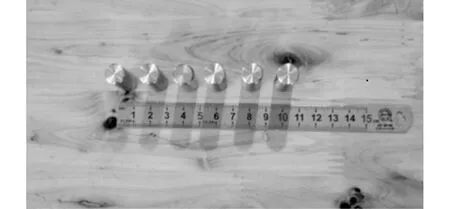
图14 不同半径偏差的滚柱样品Fig.14 Roller samples of different radius deviation
3 结论
(1)提出的张环式超越离合器结构新颖紧凑,通过对其工作原理进行分析认为,该类超越离合器的自锁实质是转动副的自锁,而其自锁的数学模型可表述为自锁深度小于等于自锁阈值。
(2)分析了张环式超越离合器的自锁与超越条件,并进行实例求解,理论分析显示,此种超越离合器的结构在降低结构复杂程度与加工成本等方面具有一定的优势。分析了张环式超越离合器自锁条件对滚柱磨损的敏感性,并与滚珠式超越离合器进行对比,理论分析表明,在此项特性上,张环式超越离合器有一定提升。
(3)对张环式超越离合器进行了运动学仿真及样机实验,证明此种新型超越离合器原理正确、合理,样机实验结果表明:选取适当的润滑条件,并且尽量在有连续润滑油供给的油润滑条件下,张环式超越离合器可以获得较高的运动精度。
[1] 张展. 联轴器、离合器与制动器设计选用手册[M]. 北京:机械工业出版社,2009. ZHANG Zhan. Handbook of Design and Selection of Stretching Couplings, Clutches and Brakes[M].Beijing:China Machine Press,2009.
[2] 杜力,冯俊,邹昌平,等. 带辅助环的楔块式超越离合器工作机理及楔紧和退楔条件的研究[J].机械设计,2009,26(7):72-74. DU Li, FENG Jun, ZOU Changping, et, al. Study on Working Mechanism and Conditions of Wedge Caulking and Wedge Refunding of Wedge Typed Overrunning Clutch with Assistant-ring[J]. Journal of Machine Design,2009,26(7):72-74.
[3] 吴凯,严宏志,何明生,等.对数曲面楔块的PCE型离合器动力学特性分析[J].中国机械工程,2011,22(6):47-52. WU Kai, YAN Hongzhi, HE Mingsheng, et, al. Dynamics Analysis of Logarithm Curved Surface Spra PCE Clutch[J]. China Mechanical Engineering, 2011, 22(6):47-52.
[4] 曲秀全,陆念力.一种新型楔块式低副单向超越离合器[J].机械工程学报,2004,40(1):195-198. QU Xiuquan, LU Nianli. New V-shaped Unidirectional Clutch with Lower Pair[J]. Journal of Mechanical Engineering, 2004, 40(1):195-198.
[5] 张广芸. 偏心调速脉动无级变速器及低副单向超越离合器的研制[D].哈尔滨:哈尔滨工业大学,2006. ZHANG Guangyun. Eccentric Speed-regulating Pulse-type Stepless Transmission and Its Lower Pair and One-way Overrunning Clutch’s Research and Manufacture[D]. Harbin:Harbin Institute of Technology, 2006.
[6] 曲秀全,车仁炜,孙荆芒,等. 楔块式低副单向超越离合器[J].机械传动,2002,26(2):76-78. QU Xiuquan, CHE Renwei, SUN Jinmang, et al. V-shaped Unidirectional Clutch with Lower Pair[J]. Journal of Mechanical Transmission, 2002, 26(2):76-78.
[7] LIU K, BAMBA E. Analytical Model of Sliding Friction in an Overrunning Clutch[J]. Tribology International, 2005, 38 (2):187-194.
[8] CHEON Gill-Jeong. Effect of a One-way Clutch on the Nonlinear Dynamic Behavior of Spur Gear Pairs under Periodic Excitation[J]. Journal of Mechanical Science and Technology, 2006, 20(7):941-949.
[9] 黄华星,刘莹,权英华,等. 超越离合器自锁本质辨析[J]. 机械传动,2007,31(1):55-57. HUANG Huaxing, LIU Ying, QUAN Yinghua, et al. Analysis of Self-locking of Overrunning Clutch[J]. Journal of Mechanical Transmission, 2007, 31(1):55-57.
[10] 黄靖远,张浩,王序云,等. 链环式超越离合器的数学模型和特性分析[J]. 清华大学学报(自然科学版),1997,37(11):35-38. HUANG Jingyuan, ZHANG Hao, WANG Xuyun, et al. Mechanical Model and Feature Analysis of Chain-ring Overrunning Clutch[J]. Journal of Tsinghua University(Sci.&Tech.) , 1997, 37(11):35-38.
[11] 黄靖远,张浩,王序云,等. 链环式超越离合器的工作原理和物理本质[J]. 中国机械工程,1997,8(1):108-110. HUANG Jingyuan, ZHANG Hao, WANG Xuyun, et al. Working Principle and the Physical Essence of Chain-ring Overrunning Clutch[J]. China Mechanical Engineering, 1997,8(1):108-110.
[12] 林军,黄茂林. 基于自调的差动双制动块式超越离合器工作机理与数学模型[J]. 中国机械工程,2002,13(5):361-363. LIN Jun, HUANG Maolin. The Working Principle and the Mathematics Model of Differential and Double Brake-block Overrunning Speed Clutch Based on Automatic Adjusting[J]. China Mechanical Engineering, 2002, 13(5):361-363.
(编辑 苏卫国)
Working Principle of New Expanding-ring Type Overrunning Clutchs and Their Self-locking and Overrunning Conditions
DU Li1,2PENG Siyang2WEI Dong2SONG Zeliang2WU Zhenhong2
1.Chongqing Key Laboratory of Mechanism Design and Control for Manufacturing Equipment, Chongqing,400067 2.School of Mechanical Engineering,Chongqing University of Technology,Chongqing,400054
A new expanding-ring type overrunning clutch was proposed, its self-locking component was a ring which was in a lower pair face contact with the ouPSut members and whose carrying capacity was improved compared with conventional higher pair type overrunning clutchs. The self-locking and overrunning conditions were analyzed and the self-locking conditions on the pin roller wear sensitivity were studied. Theoretical study shows that the clutch performance is superior to the pin roller type overrunning clutchs. Finally, the simulation and experimental verification of a new type of tension ring clutch were carried out.
expanding-ring type overrunning clutch; lower pair face contact; condition of self-locking and overrunning; simulation and experiment
2016-08-09
国家自然科学基金资助项目(51105397)
TH112
10.3969/j.issn.1004-132X.2017.12.00172
杜 力,女,1971年生。重庆工商大学机械工程学院教授、博士,重庆理工大学机械工程学院硕士研究生导师。主要研究方向为机构学、无级变速器、CAD/CAE。E-mail:dulicq@126.com。彭斯洋,男,1993年生。重庆理工大学机械工程学院硕士研究生。魏 东,男,1989年生。重庆理工大学机械工程学院硕士研究生。宋泽良,男,1990年生。重庆理工大学机械工程学院硕士研究生。吴振宏,男,1992年生。重庆理工大学机械工程学院硕士研究生。
猜你喜欢
园林科技(2021年2期)2022-01-19
表面技术(2021年9期)2021-10-16
中国科技纵横(2021年2期)2021-05-17
石油沥青(2021年1期)2021-01-11
上海金属(2020年5期)2020-09-26
中国特种设备安全(2019年7期)2019-09-10
中医眼耳鼻喉杂志(2019年2期)2019-04-13
汽车实用技术(2018年22期)2018-12-08
筑路机械与施工机械化(2018年1期)2018-03-06
中国铸造装备与技术(2017年2期)2017-06-01