一种基于弹道的时间配准算法
2017-07-06 13:27宋本钦张靖史伟石教华
中国电子科学研究院学报 2017年3期
宋本钦,张靖,史伟,石教华
(中国电子科学研究院,北京 100041)
工程与应用
一种基于弹道的时间配准算法
宋本钦,张靖,史伟,石教华
(中国电子科学研究院,北京 100041)
时间配准是分布式多传感器融合处理的前提之一,配准误差直接影响后续融合精度。常用时间配准算法通过直线或近似曲线的拟合完成目标的配准,对空中目标通常能够取得较高的配准精度。但对于速度较快、轨道固定的弹道目标则误差较大,难以保证配准精度。因此提出基于弹道的时间配准算法,估计目标当前位置和速度后计算目标的轨道并进行时间配准。通过仿真可以发现,与其它算法相比,本文所提出的算法能够明显地降低弹道目标的时间配准误差。
时间配准;弹道;分布式融合
0 引 言
在分布式多传感器融合系统中,通常传感器的精度、类型都各不相同,且所处的位置和扫描周期也存在着很大的差异。即使在对同一个目标进行观测跟踪时,各传感器得到的目标观测数据也往往是异步的。所以,在对多传感器信息进行融合时,首先需要把这些观测的异步航迹数据同步到同一时间上,即进行时间配准。因此,时间配准是分布式多传感器融合处理的前提,并且其配准精度关系到后续的融合效果。
目前常用的时间配准方法有最小二乘法[1]、拉格朗日插值法[2]、泰勒展开法[3]。文献[4]分别对上述方法进行了仿真验证。在众多时间配准方法中,最小二乘法由于模型相对简单,精度不高,限制了其广泛的应用。插值法是根据函数的已知数据求出一个解析式,确定近似函数后根据函数式计算所求时刻的数据。差值通常在已知数据的中间才能获得较高的配准精度,利于数据事后处理,不能满足实时处理的需求。文献[5]在现有算法基础上提出了自适应的时间配准方法,能够使目标在不同运动状态中自适应选取上述合适的方法,有效地降低时间配准误差。研究发现对航迹进行时空配准或者其它校准,航迹相关也能够得到增强,从而提高融合精度[6]。
上述方法对于沿直线运动的空中或水面目标通常能够取得比较好的配准精度,而对于弹道导弹目标通常误差较大。弹道导弹目标在飞行过程中的运动状态与空中、海面目标有明显的差别。弹道导弹经历助推段后,助推火箭处于关闭状态,此时导弹在外大气层中处于自由飞行的阶段。该阶段中导弹目标通常与雷达距离较远,且飞行速度较快,传统算法配准误差相对较大。因此,本文提出了一种基于弹道的时间配准算法,该算法首先根据估计的目标当前位置和速度来计算其弹道,并根据弹道获取目标在其它时刻的运动状态,降低时间配准误差。
1 常用时间配准算法
1.1 拉格朗日插值法
拉格朗日插值是一种简单快速的时间配准方法,可以将高精度观测数据向低精度时间点进行内插和外推。拉格朗日插值法通常包括两点插值和三点插值。假设目标在t1、t2和t3时刻的位置分别为(x1,y1,z1)、(x2,y2,z2) 和(x3,y3,z3),则通过两点插值(式1)和三点插值(式2)得到目标在t时刻的位置(x,y,z)分别为
(1)
(2)
同理可得y和z表达式。该方法简单,计算量较小,可根据最新的两点或三点目标位置信息完成相应的时间配准。算法需要插值多项式通过已知的观测点,由于数据在测量过程是有误差的,真实值并不一定通过所以观测数据点。因此,这种方法产生的配准误差与雷达量测误差有直接关系。
1.2 线性最小二乘拟合法
线性最小二乘拟合法需要将给定的所有观测数据拟合成一条直线,其表达式为:

(3)
α和b为相应系数,且:
(4)
该算法需要至少两个已知观测点,本文采用了三点拟合,计算获取系数α和b后即可计算目标配准时刻的位置。该算法不需要拟合后的直线经过所有的观测点,只要能够反映数据的趋势即可。因此拟合的结果能够更客观反映数据的实际情况。三点拟合通常能够比两点更能够有效地降低随机误差的影响,比较适合匀速目标的拟合[5]。
1.3 二次多项式最小二乘拟合法
二次多项式最小二乘拟合法通过将给定的观测数据拟合成一条近似二次曲线来反映数据的客观趋势。与线性最小二乘拟合法一样,该算法不需要曲线通过所有的给定的观测点。二次多项式拟合表达式为:
(5)
式中,系数α0,α1,α2需要满足如下方程:
(6)
该算法同样需要采用最新的三点数据拟合来降低随机量测误差的影响,比较适合匀加速目标的拟合[5]。
2 弹道目标轨道参数计算
首先,计算弹道导弹轨道平面的方向数:
(7)

(8)

(9)
目标和速度v及h计算如下:
(10)
(11)
随后可以通过以下公式逐一计算轨道的六个轨道根数:
(1)轨道倾角
(12)
(2)升交点赤经Ω
(13)
(3)轨道偏心率
(14)
其中:
(15)
μ为地球引力常数。
(4)近地点幅角ω
(16)
(5)轨道半长轴
(17)
(6)过近地点时刻
(18)
其中:
(19)
3 基于弹道的时间配准算法描述
弹道导弹在整个飞行过程中通常需要经历三个阶段:助推段、中段和再入段。其中,中段是弹道中最长的阶段,弹道导弹在中段飞行过程中助推火箭处于关闭状态,导弹在外大气层中处于自由飞行的阶段。防御方有足够的时间做出决策,以便确定是否发射栏截弹。因此,对弹道导弹的跟踪和拦截通常是在中段完成。弹道目标不同于空中目标,在中段飞行过程中机动较小,飞行轨迹相对固定。因此,本文从目标在中段的运动特性出发,提出基于弹道的时间配准方法。
在分布式多传感器融合系统中,通过对目标跟踪可估计目标位置和速度信息,再根据估计的目标位置和速度信息计算得到弹道目标轨道的六个轨道根数,随后的导弹运动状态计算需要求解开普勒方程:

(20)
其中,M为平近点角,表示以角速度n在(k-τ)时间内飞过的角度。
在实际工程应用中,往往会需要通过开普勒方程根据已知M求解E,此时是求解超越方程,难于得到解析解的形式,在工程上常使用文献中的迭代法[8]。
设k时刻导弹的位置为(x,y,z),近地点方向的单位矢量为P=(Px,Py,Pz),而在轨道平面内按导弹运动方向与P方向垂直的单位矢量为Q=(Qx,Qy,Qz),求解开普勒方程得到E后,则
(21)
(22)
其中
(23)
(24)
根据上述公式,可以根据弹道导弹在某时间估计的位置和速度,解出导弹在中段其它时刻k的运动状态,具体算法步骤总结如下:
(1)将目标估计的运动状态(位置和速度)转换到地心惯性坐标系;
(2)根据目标运动参数(位置和速度)计算目标弹道的六个轨道根数;
(3)根据已知的k及算得的e和τ对开普勒方程进行求解,获取k时刻的偏近点角E(k);
(4)利用式(21)~(24)即计算得到目标在k时刻的运动参数。
基于弹道的时间配准算法的流程图如图1所示。
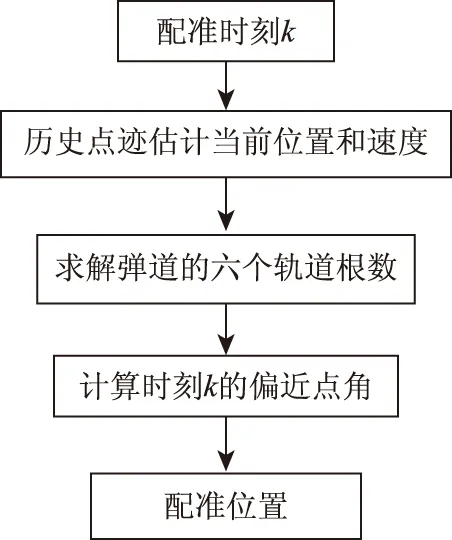
图1 基于弹道的时间配准算法流程
4 实验结果及分析
为了验证本文中所提出的方法有效性,进行了计算机仿真实验。仿真实验中雷达传感器的参数如下:测距精度80 m,测角精度0.35°,采样周期T为1 s。仿真时间设为500 s,其中误差比较从30 s开始,目标运动真实状态和量测结果如图2所示,仿真计算结果如图3所示。
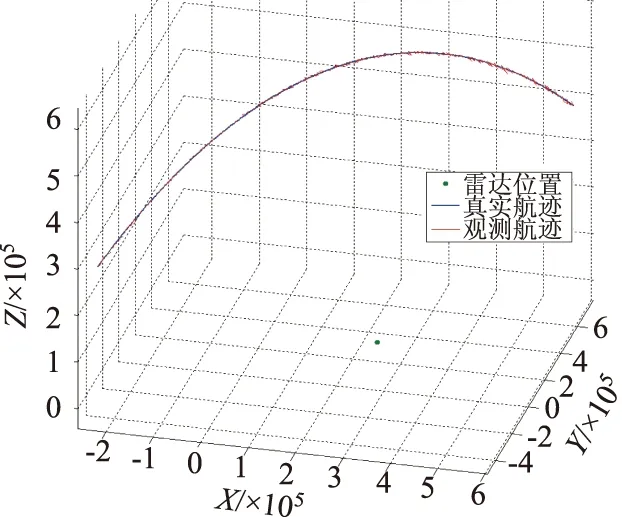
图2 目标真实航迹和雷达观测航迹
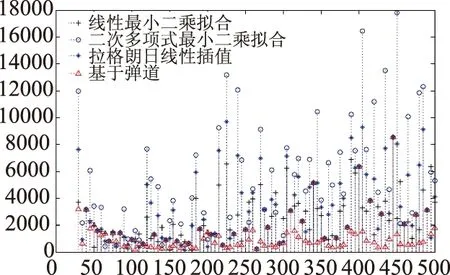
图3 不同算法时间配准误差
从图3中可以发现,本文提出的基于弹道的时间配准方法的误差要明显小于其它对比的算法。需要注意的是,本文提出的基于弹道的时间配准算法需要事先估算出目标的位置和速度进行轨道根数的计算。本文中使用Singer模型跟踪算法[9]对目标进行跟踪滤波获取最新时刻的目标状态信息。通常情况下弹道目标在中段自由飞行过程中基本不存在机动性,因此跟踪滤波收敛后,能获得相对比较稳定可靠的目标运动状态。这样就能保证基于弹道的算法随滤波精度的提高而获取更准确的时间配准精度。
但是需要注意的是,基于弹道的时间配准算法很大程度上依赖于滤波算法对当前位置和速度的估计。由于航迹数据滤波误差的存在,如果跟踪精度不高的话,将给配准算法的精度带来一定影响。总的来说,弹道导弹目标通常在中断不会出现机动情况,而是处于自由飞行的状态,这就保证了该方法的配置误差随滤波精度的提高而降低。
5 结 语
本文提出了基于弹道的时间配准算法,首先对目标进行跟踪估计出目标运动状态并计算该弹道目标轨道根数,然后通过求解开普勒方程来获取目标在任一时刻的位置。该算法能够有效地降低弹道目标时间配准误差。通过仿真与其它算法对比发现,该算法对弹道目标进行时间配准时误差更低。
[1] 韩崇昭,朱洪艳,段战胜,等.多源信息融合[M]. 北京:清华大学出版社, 2006.
[2] 牟聪.多传感器数据融合系统中数据预处理的研究[D].西安:西北工业大学, 2006.
[3] 刘利生.外测数据事后处理[M]. 北京:国防工业出版社, 2000.
[4] 彭焱,徐毓,金宏斌,等.多传感器数据融合系统中时间配准算法分析[J].雷达与对抗,2005(2):16-19.
[5] 董凯,关欣,刘瑜,等.基于机动检测的自适应实时时间配准算法[J].雷达科学与技术,2014(1):86-90.
[6] 肖双爱,李钦富,王忠强. 数据链中航迹校准算法研究[J].中国电子科学研究院学报, 2009(4):422-426.
[7] 王忠强. 弹道导弹预警雷达系统仿真模型研究[J]. 系统仿真技术,2013(9):332-338.
[8] 张守信.外弹道测量与卫星轨道测量基础[M]. 北京:国防工业出版社, 1992.
[9] 何友,修建娟,关欣. 雷达数据处理及应用[M]. 北京:电子工业出版社, 2013.
One Time Registration Algorithm Based on Trajectory
SONG Ben-qin, ZHANG Jing, SHI Wei, SHI Jiao-hua
(China Academy of Electronics and Information Technology, Beijing 100041, China)
The time registration of is one of the premises in multi-sensor distributed fusion, and the registration error will directly affect the accuracy of subsequent fusion work. Familiar time registration algorithms complete time registration of target by linear or curve fitting, usually get high accuracy on air targets. However, the registration precision couldn't be ensured for ballistic target with high speed and designated orbit. In this paper, we proposed a new time registration algorithm based on trajectory, which completes time registration by obtaining target orbit using estimated position and speed. The simulation results show that the proposed algorithm can decrease the time registration error effectively for ballistic target when compare with other traditional methods.
time registration; trajectory; distributed fusion
10.3969/j.issn.1673-5692.2017.03.003
2017-04-01
2017-06-01
TN953
A
1673-5692(2017)03-237-04

宋本钦(1984—),男,安徽人,工程师,主要研究方向为数据融合;
E-mail:benqinsong@126.com
张 靖(1975—),女,四川人,研究员级工程师,主要研究方向为电子信息工程设计、信息融合等方面的研究工作;
史 伟(1981—),男,山西人,高级工程师,主要研究方向为信息融合与目标跟踪技术;
石教华(1976—),男,湖北人,高级工程师,主要研究方向为多传感器数据融合。
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
一重技术(2021年5期)2022-01-18
空间科学学报(2020年6期)2020-07-21
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2019年7期)2019-04-25
电子制作(2018年11期)2018-08-04
制导与引信(2016年3期)2016-03-20