
ADS—B与空管监视雷达数据的融合处理研究
2017-07-09 17:00严景谦
科学与财富 2017年18期
严景谦
摘 要: 随着我国经济的发展和人民生活水平的提高,民航运输的压力也在日益增长,与此同时,社会对航空事业发展的关注度也在随之提升。因此,加快构建全新的飞机航行系统,通过ADS-B与空管监视雷达数据融合技术的应用,提高民航飞行轨迹的观测精度,促进民航飞行安全稳定性的提升,就成为了值得研究的课题。本文主要从ADS-B与空管监视雷达的涵义入手,对ADS-B与空管监视雷达数据的融合处理进行了分析和研究,旨在为ADS-B与空管监视雷达数据的有效融合提供参考。
关键词: 监视技术;空管;数据;融合
前言
随着我国航空事业的快速发展,空中航班的交通流量也随之增长,这就给空中交通管制带来了全新的压力与挑战。新时期背景下,为了确保航班的交通安全,有效提升飞机的航行效率,就必须对空管系统加以升级和优化。目前,我国空中管制多依靠甚高频通信与雷达监视,然而此模式存有明显局限性,而ADS-B能够对雷达覆盖问题加以有效解决,因此,ADS-B信号与空管监视雷达信号的融合处理就成为了本文所要研究的内容。
1 ADS-B与空管监视雷达概述
1.1 ADS-B概述
ADS-B是自动相关监视与广播式的英文缩写,从字面含义来理解,自动指的是该设备无需人工操作;相关指的是信号数据信息内容全部源自机载设备;监视指的是设备主要用于对目标具体位置进行确认;广播指的是数据传输的方式并非针对特定的用户,而是对具有相关装备的用户进广播通知。
1.2 ADS-B与空管监视雷达概述
数据融合指的是通过数据的综合处理,实现对实体评估的目的。当前,我国的空中管制多采用雷达进行目标监视,然而雷达存在覆盖面积有限的明显缺陷。而通过采用ADS-B技术能够实现对飞机空地与空空的全面监测,同时采取全向广播的方式,对机载设备进行监控信息的自动发送与接收,其中,监控信息的内容包括了飞机飞行的经纬度、速度、高度、方向、识别信息等内容。因此,在航空系统中应用ADS-B技术能够为飞机航行提供可靠的监控数据,同时快速进行地形、天气等与飞行相关的关键性信息和内容的传送,以此提高飞机飞行的安全性。此外,该项技术的投入成本较低,通常只占雷达系统资金投入的1/10,且具备无盲区、使用寿命长等优势。因此,ADS-B在我国航空事业发展方面具有广泛的应用前景。
2 ADS-B与空管监视雷达数据的融合处理
当前,ADS-B和空管监视雷达数据融合通常采用两种方式,一是优选法,即在管制终端仅显示ADS-B航迹或是雷达航迹,而非采取不同符号对ADS-B和雷达航迹予以区分,此类方法操作简单,较为容易实现,它可对雷达覆盖区域进行雷达航迹的显示,对雷达未覆盖区域进行ADS-B航迹的相關显示。然而,它具有明显缺陷,即无法对ADS-B和雷达所覆盖区域进行航迹的及时告警,同时,由于ADS-B与雷达在进行目标相关位置计算时所采用的算法差异,致使目标跨越两者交叠覆盖区时常会产生严重跳点状况等。第二种方法则为融合法,采用此法可对优选法所存在的漏洞进行有效弥补。
2.1 构建数据融合模型
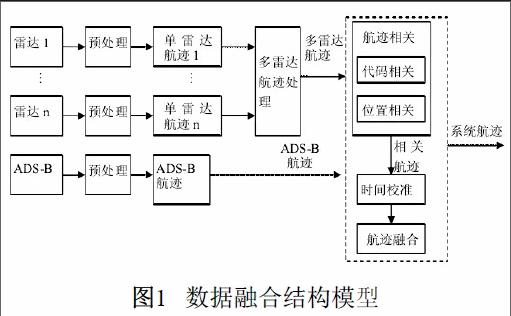
通常来讲,数据融合的功能主要包括了信息校准、识别、相关与估计等内容,其中,校准与相关主要是为接下来的目标识别与估计进行准备作业,而实际的融合正是在识别与估计当中进行的,图1为ADS-B与多雷达数据进行融合的构建模型,通过ADS-B和雷达数据信息的有效融合,能够实现对同一区域不同目标的实时监测。
2.2数据的融合方式
通常来讲,数据融合系统可分为分布式、集中式与混合式。其中,分布式作为一种能够有效避免信息数据出现损失的融合方式,在现有的空管监视系统当中得到了应用与推广。
在分布式结构的融合系统中,首先会形成各个目标本身的本地航迹,然后将相关处理信息及结果传递至融合中心处,再在融合中心处加以融合,从而生成更加精准的系统航迹。
在ADS-B和多雷达的数据处理过程中,首先,需要将各雷达的输入数据与ADS-B数据加以校验;其次,对其中所包含的错误数据进行剔除,以此形成完整的航迹数据,并给出相关目标的状态估计;然后,将相关数据信息传送至多雷达的融合系统当中去,使雷达与ADS-B产生的本地航迹在进行坐标变换及时空校准后,再进行与系统航迹的关联及融合;最后,实现ADS-B和空管监视雷达相关数据信息的高效融合。
(1)前端雷达的数据处理
由于传送至航管中心的ADS-B和各雷达数据格式各有差异,且考虑到传输过程中的不确定性,极易出现数据信息错误的状况发生,因此,需要对数据的格式进行分析,同时,还需依照预先设定的规则和标准对数据加以校验,并将其中明显出现错误的数据剔除,最后,才能对数据加以集中处理。
(2)单雷达与ADS-B的数据处理
首先,需进行ADS-B与各雷达数据的格式识别,在确认无误后,再依照各自的数据格式,对所接收到的数据加以分析和解释,同时,将数据内容转换成系统内部所设置的统一数据格式,再采取经纬度坐标系对数据内容进行坐标的同步转换,以便后续处理。
(3)多雷达与ADS-B的融合处理
由于各台雷达均将各自所在的地理位置当作参照对象,进行实际目标运动路径的具体探测,这就导致数据信息缺乏在时间、空间、参照对象及坐标系等方面内容的统一标准。因此,在单雷达和ADS-B将航迹传送至后端展开多雷达数据的相关处理作业之前。必须对时间轴进行校准,对正北方向加以校正,同时对坐标变换进行系统性的统一处理,在以上预处理工作完成以后,方可进行自动化系统中时空参考坐标的统一化处理,以此降低数据融合过程中所产生的误差。
在对单雷达数据进行处理后,使相关数据信息格式统一转换成内部标准格式,经过上述操作,使系统接收到的雷达探测数据均为统一格式,然后再采取分布式传感器进行融合系统的功能模型构建,同时,还需以各个单雷达所探测的航迹跟踪为基础,对源自不同雷达的不同航迹是否表示同一目标加以判断,并依据下列条件对不同站点发送的目标信息进行合并处理:①速度相关;②位置相关;③高度相关;④24bit的地址码及二次代码相关。
由于系统于同一时间会对雷达与ADS-B所发送的两种数据信息进行判断,以此为空管中心提供误差较小的系统航迹,从而确保航迹准确度。在这一过程中,主要通过多路传感器的数据融合模块(MST),并采取动态数据进行经度检测的方式,对ADS-B及雷达数据信息加以平衡,同时,对一个目标相关联的多个数据采用加权法进行计算,若某传感器质量出现下降,则系统MST会自动将其权重予以降低,必要时,甚至会完全舍弃。
系统航迹一经产生,系统MST就会将该航迹同飞机现有飞行计划加以关联,若航迹内容中含有二次代码,则此关联需建立在二次代码与飞行计划基础之上,此时,航迹标牌则会显示与飞行计划相关联的具体航班号。
若系统航迹仅包括含有ADS-B数据信息的相关报告,则建立在飞行计划与二次代码相关的准则无法适用于此情况,此时,系统会依据飞行计划中相应的飞机注册号及航空公司来对24bit地址码进行确认,在确认以后,系统MST会将二次代码予以24bit地址码的替换操作,之后再与飞行计划加以相应关联。
分布式系统能够有效压缩数据信息数量,从而降低传感器与数据融合中心处二者间的信息通讯负荷,同时,中心处理器也能够对相关航迹数据进行处理,以此降低融合中心的负担,提高数据处理效率。
3 总结
综上所述,通过对ADS-B技术的应用,能够实现与传统雷达系统的协同作业,以此提升空管中心对飞行目标的监控效率。本文主要对ADS-B与空管监视雷达数据的融合处理方法进行了分析和研究,从而确保飞机的安全稳定飞行。■
参考文献
[1]刘轩宇. 浅析ADS-B与空管监视雷达的融合处理方式[J]. 通讯世界, 2015(16):246-247.
[2]陈霄. ADS-B与雷达组合监视数据融合方法研究[J]. 无线互联科技, 2015(23):110-111.
[3]卢升云. 空管自动化系统的多雷达与ADS-B数据融合技术综述[J]. 通讯世界, 2016(6):109-110.
猜你喜欢
今日农业(2021年19期)2022-01-12
中老年保健(2021年11期)2021-08-22
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
现代出版(2020年3期)2020-06-20
民航管理(2019年2期)2019-06-04
劳动保护(2019年3期)2019-05-16
价值工程(2016年30期)2016-11-24
电脑知识与技术(2016年24期)2016-11-14
河南科技(2014年22期)2014-02-27
河南科技(2014年10期)2014-02-27
