GNSS单历元进行监控测量关键问题分析
2017-07-15 05:10谭立萍
价值工程 2017年22期
谭立萍
摘要: 本文对高层建筑采用GNSS单历元算法进行连续动态形变监控测量,研究了单历元解算形变信息的数学模型,对无整周参数的单历元算和单历元似单差算法进行模型分析,确定GNSS形变监控测量单历元似单差算法解算模型的误差来源。为提高GNSS动态监控测量的精度,本文针对GNSS单历元算法的进行模拟分析和系统研究,为建筑物的形变规律和健康运营提供指导。
Abstract: In this paper, the GNSS single epoch algorithm is used to measure the dynamic dynamic deformation of the high-rise building. The mathematical model of the deformation information of the single epoch is studied, the single epoch algorithm of no whole week parameter and single epoch similar single difference algorithm model is analyzed to determine the error source of the single epoch similar single difference algorithm model in GNSS deformation monitoring. In order to improve the accuracy of GNSS dynamic monitoring and measurement, this paper simulates and systematically studies the GNSS single epoch algorithm to provide guidance for the deformation law and healthy operation of the building.
關键词: GNSS单历元;形变监控测量;形变规律;模拟分析
Key words: GNSS single epoch;deformation monitoring and measurement;deformation law;simulation analysis
中图分类号:P228.4 文献标识码:A 文章编号:1006-4311(2017)22-0206-02
0 引言
对于高层建筑物进行GNSS动态形变监控测量,可以有效地了解建筑结构缓慢形变的健康状况,并针对建筑物的安全运营能力做出相应的评估。但GNSS动态测量很难达到毫米级精度要求,再加上监测环境的限制、周跳的影响等,使GNSS监测数据不稳定。利用GNSS定位技术对高层建筑进行形变监控测量,主要是基于载波相位观测方程进行定位解算,而载波相位观测值解算过程中需要解算模糊度和消除周跳,单历元算法解决了周跳探测和修复问题,但仍然需要解算整周模糊度。
1 GNSS进行监控测量存在问题
将单历元算法应用到超高层建筑变形检测中,需要注意以下几个问题:由于利用单历元算法解算变形量,需要利用首期观测坐标固定双差模糊度,所以单历元算法适用于小形变监控测量;单历元算法还存在成功率低、可靠性差以及可区分度弱等问题;利用试验对单历元算法进行变形信息解算,需要对其精度进行分析。高精GNSS载波相位测量,需要对模糊度进行结算,并消除周跳。若能求解出准确的模糊度,即使没有周跳,仅需要一个历元的观测数据就可以使定位精度达到cm级。依据高精GNSS监控测量的特点,以监控网的首期观测成果为解算基础,监测时段的载波相位作为基本观测量,本文拟建立一种适合于高精GNSS变形监控测量的单历元似单差算法。
2 解算形变信息的单历元数学模型
2.1 GNSS载波相位测量
相对定位多采用载波相位测量,大部分观测误差具有相关性,可以相互削弱甚至抵消掉。载波相位观测方程不仅包含待定点的坐标参数、整周未知数,还包含接收机种差、卫星种差以及电离层延迟等,由于两站误差具有相关性,在接收机间求一次差可以消除卫星钟差的影响,可以大大削弱卫星星历误差、对流层和电离层折射的影响;二次差是在接收机和卫星间求差,可以消除接收机的钟差;若是在接收机、卫星和历元间进行三次差,则可以消除整周未知参数,但是其求解向量精度不高。
2.2 无整周参数的单历元算法 短基线情况下,利用双差观测方程,可以消除各项误差。当监测点相对初始坐标变形较小,可以利用初始坐标单历元固定双差模糊度,从而进行单历元形变解算。在高精GNSS形变监控测量中,要建立可靠的形变分析监测网基准,进行初次观测时,需要具备高精度的基线向量。利用初次观测的基线向量作为约束条件,从而解算出后期形变监控测量的双差整周未知数。
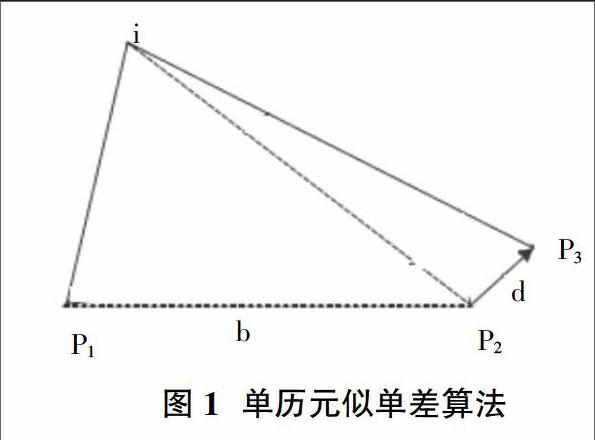
2.3 单历元似单差算法 首期GNSS形变监测网如图1所示,已知基准点P1和监测点P2的精确WGS—84坐标。后期进行形变监控网观测时,基准点P1拟定不动,监测点P2时时发生形变。假定P2点形变后的位置为P3, d表示形变量。
如图1所示,空间四边形由P1、P2、P3和卫星i组成,形变量d可以通过对卫星i的载波相位观测值和已知基线向量b来表示。为获取监测点的空间变形量,将d在XYZ三个方向进行投影,由于基准站和监测站距离较近,两测站对同一卫星的方向余弦近似相同,则通过站间单差消除与卫星有关的多项误差。要实现单历元解算监测点的变形量,需要计算:
若求得变形量dX,需要知道观测值的初始整周未知数N,上式即为解算GNSS监测点形变信息的单历元数学模型。该数学模型类似于载波相位观测的单差模型,只考虑到观测卫星的方向余弦。在基准点和观测点相距较近的条件下,两测站对同一卫星的方向余弦近似相同,则可以利用伪距观测值和载波相位观测值计算整周模糊度,在求出接收机钟差,即可解算出形变信息。
4 GNSS 形变监控测量单历元似单差算法解算模型
4.1 固定整周模糊度 基准点P1和监测点P2在t历元对卫星i和参考卫星j进行观测,依据双差观测方程,以基准点P1为已知点、以卫星j为参考卫星的线性化双差观测方程。利用基准网初次观测的测站坐标和t历元的卫星坐标计算伪距,通过初次观测,即可求得双差模糊度的整数解,这样双差模糊度确定。
4.2 解算形变信息 对于形变信息的在X、Y和Z方向上分量的误差方程,依据最小二乘原理,可以解算出该历元监测点的形变信息的改正数和整周未知数,从而评定观测精度。 若某一时段观测了多个历元,可以取各历元形变信息的平均值,即求监测点P2的平均变形信息,并依据历元间计算值与平均值,求出该时段的平均形变信息从而进行评定精度。
4.3 分析模型各种误差 似单差法解算形变信息精度误来源差大致可以分为两大类:一类是观测数据本身含有误差;另一类是模型建立过程中的近似计算忽略掉某些非主要因素,进而引起的模型误差。应用广义平差相关方法可以解决第一类误差,本文重点讨论第二类模型误差。
利用GNSS单歷元算法进行形变信息解算,需要通过初始观测信息固定双差模糊度,确定双差模糊度受形变量大小的影响。当解算较大形变时需要进行模糊度搜索,搜索速率会影响单历元算法的实效性。利用单历元算法进行形变监控测量需要对形变信息精度进行分析,从而达到实际工程监控测量的精度需要。
5 结论与展望
由于GNSS单历元算法不需要解决周跳的探测和修复等若干问题,利用建筑物形变监控网的初始高精基线信息作为求解双差整周未知数的条件,不必解求双差整周未知数,这样可以更为容易的求解整周未知数的固定值。GNSS单历元算法适用于小形变的监控测量,因此当测站同步观测卫星多于两颗的情况下,就可以利用似单差法解求出监测点的形变信息。为提高GNSS动态监控测量的精度,建筑物的监控测量内容和形变分析应该与初期的结构设计相结合,为建筑物的健康运营提供指导。
参考文献:
[1]戴吾蛟,朱建军,丁晓利,等.GPS建筑物振动形变监控测量中的单历元算法研究[J].武汉大学学报,2007(3).
[2]余学祥,徐绍铨,吕伟才.GPS形变监控测量信息的单历元解算方法研究[J].测绘学报,2002(3).
[3]徐绍铨,余学祥.单历元解算GPS变形监测信息的方法研究[J].全球定位系统,2002(04):23-27.