基于惯性导航的室内定位技术
2017-07-18 11:47牛长流王迪孟杉张天北方工业大学
数码世界 2017年6期
牛长流 王迪 孟杉 张天 北方工业大学
基于惯性导航的室内定位技术
牛长流 王迪 孟杉 张天 北方工业大学
物联网领域室内移动物体的定位与跟踪位置的服务逐渐在生活的各个方面得到应用,卫星定位系统由于信号遮挡等问题导致精度低甚至无法定位,所以本文提出一种基于陀螺仪和加速度计通过自身姿态信息推算的惯性导航定位技术与界面控制程序相结合的室内运动物体的定位。
室内定位 惯性导航 陀螺仪 加速度计
1 引言
随着移动互联网技术快速发展以及在中国的普及,通信技术的快速发展,基于位置的服务在生活中越来越重要。基于位置的服务主要包括室外定位和室内定位,在开阔的室外环境下,基站和GPS信号很容易到达,借助于基站和GPS定位即可达到精确的定位和导航效果。在室内环境中,由于GPS和基站信号无法穿透建筑物,借助于基站和GPS信号定位的精度很不理想,所以一种在室内环境下精确的定位方法显得尤为重要。
随着移动互联网的快速发展,以及智能设备的普及,导航和定位经常出现在我们的视野中。随着移动智能终端的普及以及智能终端在硬件和软件方面的提高,室内定位技术在一定程度上将和移动设备相结合,利用移动智能终端的便携性、高普及度以及硬件配置等优势,在移动设备上实现室内定位功能,将使室内定位服务在人们的生活中更加普及和方便,使人们随时随地都能享受到室内定位带来的方便和快捷的服务。
2 惯性导航室内定位系统原理和设计
本文利用陀螺仪、加速度计、小车等搭建室内定位系统,分为定位子系统和显示子系统两个子系统。定位子系统利用陀螺仪和加速度计进行姿态信息等自身信息的采集,通过航迹推测算法、坐标系转换等进行定位计算,得到位置等信息之后传输给显示子系统。显示子系统是PC机上基于JAVA的界面程序,其通过RS232串口获取移动物体的位置信息,将收到的位置信息显示在界面上,同时支持输入移动节点的目标位置信息,从而实现对移动物体的远程控制。

图1 室内定位系统框图
定位子系统中主要是安装在小车上的陀螺仪和加速度计,通过小车自身信息进行推算从而达到定位的效果,计划是给小车一个初始位置一个终点位置,通过算法使小车走一个比较完圆滑的线,但是随着时间的增加惯性导航系统的定位精度逐渐下降,而且小车的电机控制不是那么完美其中加速度的控制也是关键,同时系统的时间也是影响精度的关键,以及传感器读取数据的噪声影响等也是关键,所以需要一种滤波算法来提高数据的稳定性从而使效果更佳理想。
卡尔曼滤波(Kalman filtering)一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于数据中包含噪声等的影响,所以数据处理最优选择可以看做滤波过程。
坐标系转换算法,导航坐标系是在导航时根据导航系统工作的需要而选取的用于导航结算的参考坐标系,本文中用到的坐标轴选择北东天方向,即北轴指向地球北,东轴指向地球东,天轴垂直于地球表面并指向上。
3 本系统各个部分工作原理和框架设计
3.1 系统框架设计
基于惯性导航子系统配合射频技术,使移动小车在本系统中实现实时定位和导航,首先由用户在PC机上,对界面程序进行操作,确定移动小车的原始位置和目标位置信息,并利用RS232串口将移动小车的原始位置和目标位置信息传输给网关节点,网关节点一旦接收到移动小车的原始位置和目标位置信息,同时给移动小车发送射频信号,整个系统也随之开启。然后,当移动小车确定收到目标位置信息时,立刻给移动小车中的加速度计、陀螺仪传感器发送信号寻求导航定位,移动小车接收到目标位置信息并行驶至目标位置,关节点利用ZigBee射频信号,把移动物体的当前位置信息和目标位置信息打包发给PC机。

图2 本系统工作原理和框架图
3.2 显示子系统
界面程序是基于JAVA编程,来实现对系统中移动小车的实时导航定位和控制,如图2所示,界面上始终显示小车原始位置和目标位置,当移动小车在系统中移动时,界面上会实时更新小车的位置信息,界面程序会通过串口将小车的当前位置信息和目标位置信息,打包发送给网关节点,实现定位子系统和显示子系统的数据传输。
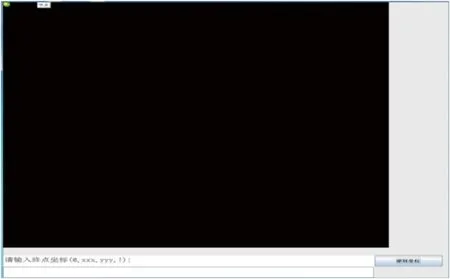
图3 可视化界面跟踪控制系统示意图
3.3 移动小车的控制
智能小车上搭载了STC89C52RC芯片,RS232模块,射频收发模块,MPU6050(加速度计、陀螺仪)模块。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
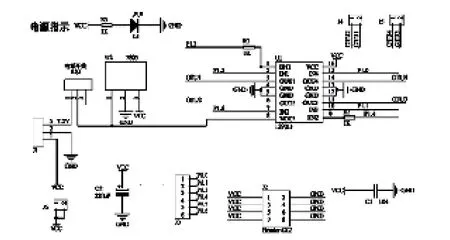
图4 电机驱动原理图
如图4所示,通过控制IN1~IN4和OUT1~OUT4管脚,即通过H桥路原理来控制直流电机的正反转,从而控制小车的前进,后退,左转,右转。
小车上搭载的射频模块,小车的当前坐标和目标坐标通过RS232串口发送给小车,小车计算处理出最优路径并且行驶到目标位置。
3.4 航迹推测算法
本系统采用的是基于陀螺仪和加速度计等模块通过算法实现室内定位与导航,航迹推测算法需要知道当前目标的位置,通过小车自己的运动就可以知道上一时刻和下一时刻的位置,如果给出当前位置和目标位置就可以实现自动到导航供能,其实现的主要原理如图5所示。
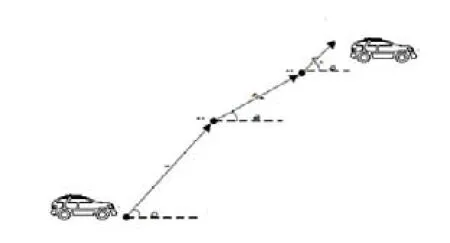
图5 小车理论航迹推算原理图
起始坐标A为(x1,y1),当小车从起始坐标A走到B,这个过程中,小车移动的位移为s1,前进的方向为θ1,可以将小车在θ1方向上的位移s1沿着水平方向和垂直方向分解,根据勾股定理可以通过公式

计算出B点的坐标(x2,y2),同理,当小车从B点走到C点时,可以根据公式
计算出C点的坐标(x3,y3)。在相反的方向,在已知C点的坐标(x3,y3)和s2以及θ2的情况下,逆向推算出上一时刻B点的坐标(x2,y2)。总结后得到公式:
根据公式得出在航位推测的过程中,航迹推测只要看小车在运动过程中的位移和方向,从而得知位移S和前进方向θ是影响航位推测的精度重要原因。给出初始位置和目标位置实现小车自动导航的过程中,传感器灵敏度以及系统的噪声以及时延等问题是影响导航精度的原因。
4 结论及展望
室内定位导航系统是一个全新的领域,本文中利用加速度计和陀螺仪等器件做了一个基础的研究工作,后续工作还有很多可以完成和扩展,包括扩大定位系统的范围,各种定位方式的融合,实现大范围多方式择优选择的定位系统,进一步的提高系统的定位速度及准确度,如何与室外定位技术实现对接完成室内外的定位系统,其中界面的设计也要多样化,包括APP以及PC端的显示等。其中小车的控制精度也有待提高,以及小车的功耗等方面。
[1]陈伟.基于GPS和自包含传感器的行人室内外无缝定位算法研究[D].合肥:中国科学技术人学博士论文,2010: 23-30
[2]Lee DikLun, XuJian-Liang, ZhengBai-Hua et al. Datamanagement in location-dependentinformation services.IEEE Pervasive Computing, 2002, 1(3): 65-72
[3]周亮,付永涛,李广军.无线定位与惯性导航结合的室内定位系统设计[J].电子技术应用,2014,40(4):73-76
[4]吕常智,姚志科.基于无线通信的移动机器人远程控制系统[J].煤矿机械,2012.33(3):239-241
[5]SeiregA,Arvikar R.J. The prediction of muscular load sharing and joint forces in the lower extremities during walking[J].Journal of Biomechanics, 2004, 3:89一102
[6]曹磊.红外无源定位技术研究[D].成都:电子科技大学,2006. 1(3): 65-72
[7]刘智平,毕开波.惯性导航与组合导航基础.北京:国防工业出版社,2013,68-70
[8]Rewal M S, Andrews A P. Kalman Filtering: Theory andPractice. New Jersey: Prentice-Hall Inc, 1993
[9]陈娇,陈玮,陆晓野,古文丽.基于GPSOne和航位推算的定位方法研究[J].计算机2012, 1(20)
猜你喜欢
科技创新与品牌(2022年7期)2022-11-15
导航定位学报(2022年4期)2022-08-15
舰船科学技术(2022年10期)2022-06-17
飞控与探测(2021年5期)2022-01-05
空间电子技术(2021年4期)2021-11-10
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年7期)2021-10-13
科学与财富(2021年33期)2021-05-10
导航与控制(2020年3期)2020-09-09
导航与控制(2019年4期)2019-09-25