
用于超级黑板的可抗震型光电定位系统设计
2017-08-30 18:28章佳辉郭华亮徐志宇赵明岩
自动化仪表 2017年8期
章佳辉,郭华亮,徐志宇,赵明岩
(1.同济大学电子与信息工程学院,上海 201804;2.博洛尼亚大学电气电子与信息工程学院,博洛尼亚 40136;3.华东理工大学信息科学与工程学院,上海 200237;4.中国计量大学机电工程学院,浙江 杭州 310018)
用于超级黑板的可抗震型光电定位系统设计
章佳辉1,2,郭华亮3,徐志宇1,赵明岩4
(1.同济大学电子与信息工程学院,上海 201804;2.博洛尼亚大学电气电子与信息工程学院,博洛尼亚 40136;3.华东理工大学信息科学与工程学院,上海 200237;4.中国计量大学机电工程学院,浙江 杭州 310018)
针对“超级黑板”应用中的定位要求,开发了一种可抗震型光电定位系统。采用STM32F103单片机作为主控芯片,选用光敏电阻检测光线,设计了矩阵键盘式电路以节约I/O口资源、缩短定位时间;芯片与电路的配合使系统具备了实时输出数字位置信号的能力。通过卡槽结构和激光头的安装,使该系统适用于以下工况:首先,测量范围较大,且要求在测量范围内无盲区(整个被测范围内保持一定的精度);其次,测量空间狭小且存在一定的震动。样机的实测结果显示,当测量范围为2 m时,系统测得的位置误差小于±0.5 cm,即精度可达 0.25%。
超级黑板; 抗震; 光电定位; STM32; 传感器; 矩阵键盘; 扫描读取
0 引言
黑板是传统课堂教学中的一种重要教学演示工具。随着多媒体技术的引入,黑板与多媒体投影配合使用时出现了新问题:①黑板的有效书写面积因为投影幕的遮盖而减小;②投影幕所在的位置使教室一侧的同学因为反光而无法看清投影内容。为此,文献[1]将投影幕与黑板紧密结合,提出了一种教学用板书投影装置,简称“超级黑板”。其基本工作原理如下。将传统的黑板改成同步带和磨砂玻璃的组合,其中磨砂玻璃(透明)置于同步带前,用于书写粉笔字。同步带分为白色投影区域和深色黑板背景区域,当后方为深色黑板投影区域时粉笔字才能被看清。白色投影区域处于同步带中的一个固定位置,通过同步带转动可以改变白色投影区域相对毛玻璃的位置,且投影仪跟随转动,使投影内容实时投影在白色投影区域上;白色投影区域可以转到同步带背侧,使整个黑板面全是深色黑板背景区域。
1 系统设计背景
为确保投影仪跟随白色投影区域平稳同步移动,关键要解决白色投影区域的精确定位问题。白色投影位置的定位需要在同步带的狭小空间内完成,并在测量范围(黑板的长度)内保持一定的精度;同时,定位过程还存在震动的干扰。
现阶段的定位传感技术广泛采用测距定位的方式。目前,典型的非接触式测距方法有超声波测距、感光耦合元件(charge coupled device,CCD)测距、红外测距、激光测距等[2]。其中,超声波测距时传播波速不恒定,回波信号幅值随传播距离增大呈指数规律衰减,且可能存在盲区;因测量距离较长需要多个超声波时,容易产生串扰的问题[2-3]。此外,红外测距仪在应用环境中也受局限。和大多数红外测距仪一样,SHARP公司的GP2Y0A02YK0红外距离传感器,测量范围为200~1 500 mm[4],其应用局限于短距离的测量定位。现阶段的高精度定位方式有:利用扫频试验和建模进行微定位、运用飞秒光频梳频域干涉的绝对测距方法等,均局限于小范围测距,且不能在震动环境下完成测量工作[5-6]。
以上测距定位方法对于上述“超级黑板”的环境均不适用。如今用于测距定位的仪器或者系统,有的要求在一定的使用范围内,超出范围误差会明显增大;有的则必须通过曲线拟合来得到相对准确的距离值[3-8]。文献[9]中石油井的井径测量,通过设计阈值迭代超声波测距系统提高精度;文献[10]提出了采用新的光纤材料来测量绝对距离,但均是在相对稳定的环境下测量一个限定范围内的距离值[9-10],尚未能得到一个适用于上述“超级黑板”应用情境的定位方案。为此,本文针对“超级黑板”的特殊应用需求,基于光电传感原理,设计了一种可抗震型光电定位系统。
2 系统整体设计
本文设计了一种用于“超级黑板”的可抗震型光电定位系统。系统分为硬件和软件两部分,硬件主要包括基于光敏电阻和激光头的传感模块、矩阵键盘式电路、STM32F103微控制器以及激光头卡槽;软件主要指运行在STM32F103微控制器的程序,主要负责位置信号扫描读取、位置信号换算及数字信号输出。硬件的搭建是为了克服震动环境的干扰,使系统在长距离测量的情况下保持一定的精度,以及给软件处理提供必要的前提。其中,传感器的安装包括光敏电阻的排布和激光头的安装,所搭建的矩阵键盘式电路可节约I/O口资源,并且通过与微处理器的配合缩短定位时间,提高效率。软件设计主要是基于矩阵键盘式电路的扫描函数,并且通过分析从I/O口获得的信号来换算出相应的位置信息,换算后用数字信号输出。可抗震型光电定位系统结构如图1所示。
3 硬件设计
3.1 硬件选择
传感器选择光敏电阻和激光头。光敏电阻在特定波长的光照射下,其阻值会迅速减小,故选取暗电阻较大、亮电阻较小的MG45-22的光敏电阻和5 V驱动的点状激光头。激光具有发散角小、时间快、性价比高、实用性强等优点,广泛应用于位移测量、定位系统中[11]。
选择STM32F103作为系统的微控制器。它是32位的ARM微控制器,具有Cortex-M3内核,最高工作频率达到72 MHz,使系统满足低成本、高精度、高稳定性和高可靠性等要求[12]。
3.2 传感器安装
在物体的运动轨迹处依次排布光敏电阻,相邻光敏电阻用不透光的隔板阻隔,光敏电阻的宽度为0.5 cm;根据总长度将光敏电阻分为n组,每一组具有相同数量(m个)的光敏电阻;对光敏电阻分别标号,从左向右依次标注RL,1、RL,2、…、RL,nm(nm即为光敏电阻的数量)。单个光敏电阻安装示意图如图2所示。
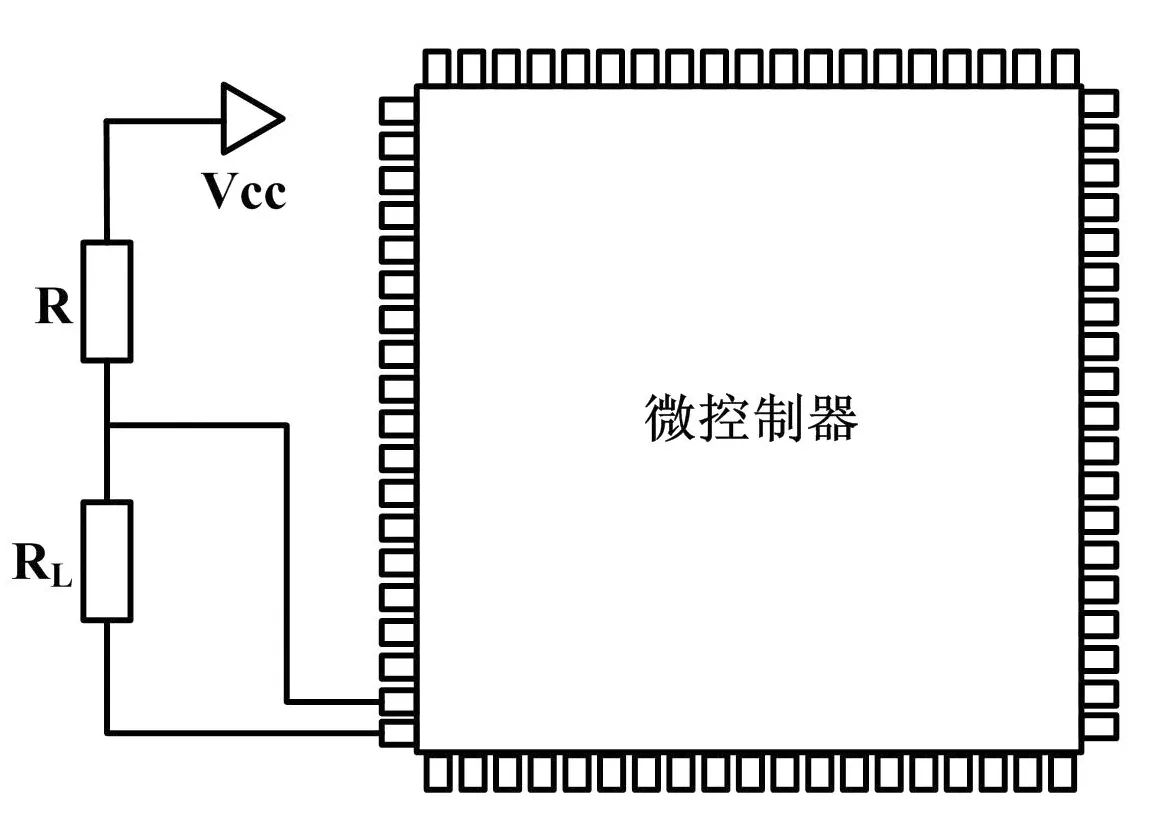
图2 单个光敏电阻安装示意图
图2中:光敏电阻一端上拉一个电阻,光敏电阻和上拉电阻之间引出一点连接到微控制器的I/O口;光敏电阻的另一端引出一个点连接到微控制器的I/O口。
系统整体安装示意图如图3所示。将排布好的光敏电阻放置于一个密封的盒子中,其一侧留出一个卡槽放置激光头,使激光头不会脱落且存在一定的空间允许震动。激光头本身架在卡槽上,其一端固定于移动物体上。光敏电阻在排布后,将引线依次和微控制器的I/O口连接。
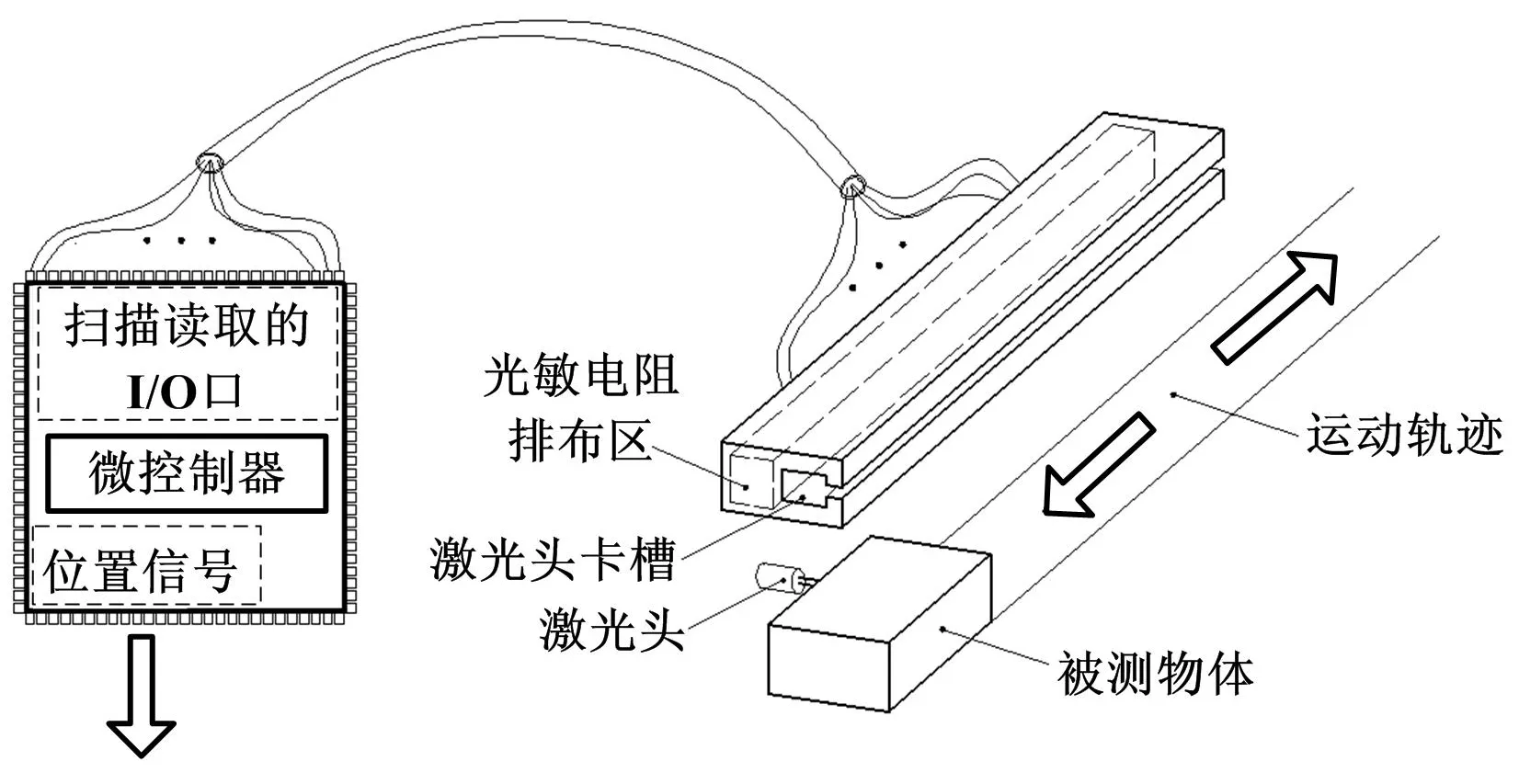
图3 系统整体安装示意图
3.3 矩阵键盘式电路搭建
矩阵键盘式电路节省了I/O口的使用数量,能够在I/O口有限的情况下,迅速定位到按键按下的位置。该应用普遍用于键盘,故得其名[13]。
基于矩阵键盘的优点,本文设计了系统中的传感部分,即矩阵键盘式电路,利用光敏电阻的光电效应取代了原矩阵键盘中的开关按键。矩阵键盘式电路如图4所示。

图4 矩阵键盘式电路图
将排布的光敏电阻分成n组,每组m个光敏电阻。X和Y是分别由光敏电阻的两端形成端口组,X包含的端口用ax(第x组中,电阻和光敏电阻之间引出的点)标记,Y包含的端口用by(所有组的第y个电阻下端连结以后引出的点)标记,则(x,y)为唯一确定的位置。本系统选用光敏电阻和激光头的组合,利用了光敏电阻在特定光照下阻值会急剧降低的特性,进行3.2节所述传感器的安装。则激光头跟随物体移动的过程中,所照射的光敏电阻阻值急剧降低,而未照射到的电阻阻值远远大于上拉电阻。即光敏电阻受到照射时,若Y(b1,b2,…,by)端口全部置0,则X(a1,a2,…,ax)端口中,被照射的光敏电阻所处的位置电压接近于0,其余为高;若X(a1,a2,…,ax)端口全部置0,则Y(b1,b2,…,by)端口中,被照射的光敏电阻所处的位置电压接近于0,其余为高。于是,上拉电阻端的电压VCC选择单片机可以承受的电压,便可以通过读取单片机I/O口的高低电平判断出光敏电阻阻值的变化,这样光敏电阻便可以看作是一个矩阵键盘的“按键”。综上所述,通过安装光敏电阻,可以形成一个矩阵键盘式的电路,具体扫描和定位详见4.1。
4 软件设计
4.1 扫描读取位置
光敏电阻两端分别可以引出端口组X(a1,a2,…,ax)和Y(b1,b2,…,bx)。
扫描程序流程如图5所示。
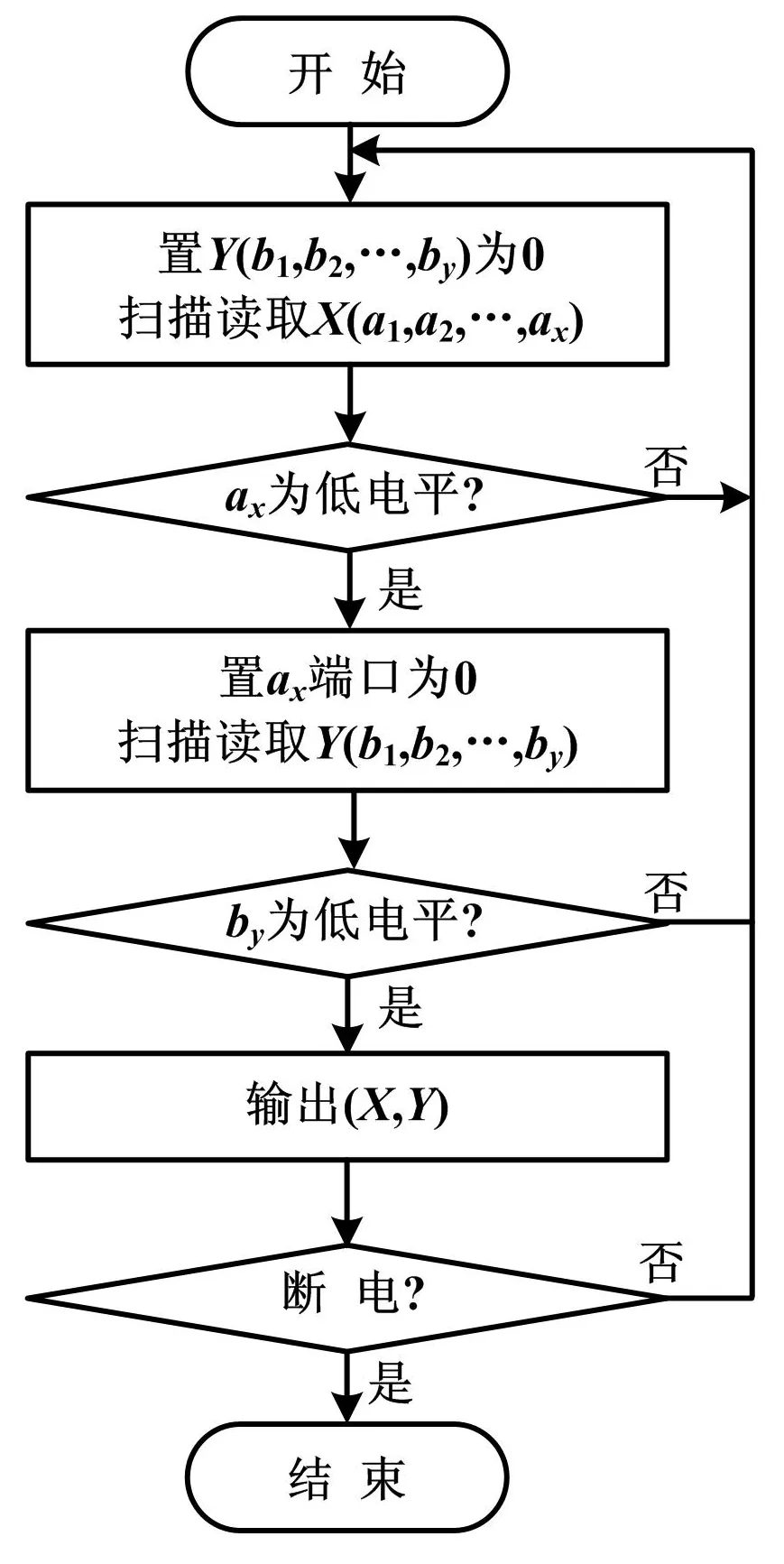
图5 扫描程序流程图
软件设置一个扫描周期,每过一段时间扫描矩阵键盘式电路引出的I/O口。若一个光敏电阻阻值发生变化(即激光头跟随物体运动到相应位置,该光敏电阻受到激光头照射),则设置Y(b1,b2,…,by)端口组所有端口的电压为0,相应的ax端口电压被拉低,其余为高。故通过扫描读取X(a1,a2,…,ax)端口组就可以找到相应的ax端口,然而ax端口连接着一组光敏电阻,具体确认需要置ax端口(仅此一个)为0,扫描读取Y(b1,b2,…,by)端口组,可以找到相应的by端口的电压为0,其余端口为高。由此即可得到唯一确定的(x,y)。该点即为阻值变化的光敏电阻所在点,也是被测物体的位置。
4.2 位置信号换算及数字信号输出
在排布光敏电阻时,给每一个光敏电阻编号,则(x,y)为确定位置。根据图4的光敏电阻排布,令上起为0点,从上到下依次排序,每个光敏电阻宽度为0.5 cm,即相邻2个光敏电阻的中心位置间距为0.5 cm,且每组有m个光敏电阻,共有n组。相邻光敏电阻用不透光的隔板阻隔,当激光照射到一个光敏电阻,即该光敏电阻的2个相邻隔板之间时,记被测物体所在的位置为该光敏电阻的中心位置。被测物体所在的位置P可表达为:
P=0.5[(x-1)m+(y-1)n]+0.25
(1)
式中:x、y分别为被照射位置所对应的2个端口组的编号,x∈{1,2,…,n},y∈{1,2,…,m}。
当激光恰巧照射在某一个隔板上,隔板2侧的光敏电阻均受到照射,则被测物体所在位置取2个光敏电阻中心位置的平均值。此时,P可表达为:
P=0.5{[(x1-1)m+(y1-1)]+[0.5(x2- 1)m+(y2-1)]+0.5}
(2)
式中:x1、y1为被照射的2个光敏电阻中距离0点较近的光敏电阻;x2、y2为较远的光敏电阻。
由STM32完成扫描信号的给定、公式的运算、数字信号的输出等操作。STM32具有32位的Cortex-M3内核,最高工作频率达到72 MHz。它不仅能快速扫描电路,还能迅速计算出数字信号位置P;可以选择通过接口输出,例如串口、液晶屏和蓝牙等,也可以直接通过单片机进行控制操作来修正位置偏差,例如输出PWM信号、控制指令等。
5 样机制作与性能测试
本文介绍的系统涉及一种新颖的传感器应用,其将光敏电阻、激光头和矩阵键盘结合,可以在较大的被测范围内输出被测物体的位置。
根据本文的内容制作样机。样机将测试长度选为2 m,随机选取24个测量点,通过卷尺测量得到真值,控制器通过串口输出到上位机的值为测量值,并且通过计算得到绝对误差。样机测试试验结果如表1所示。
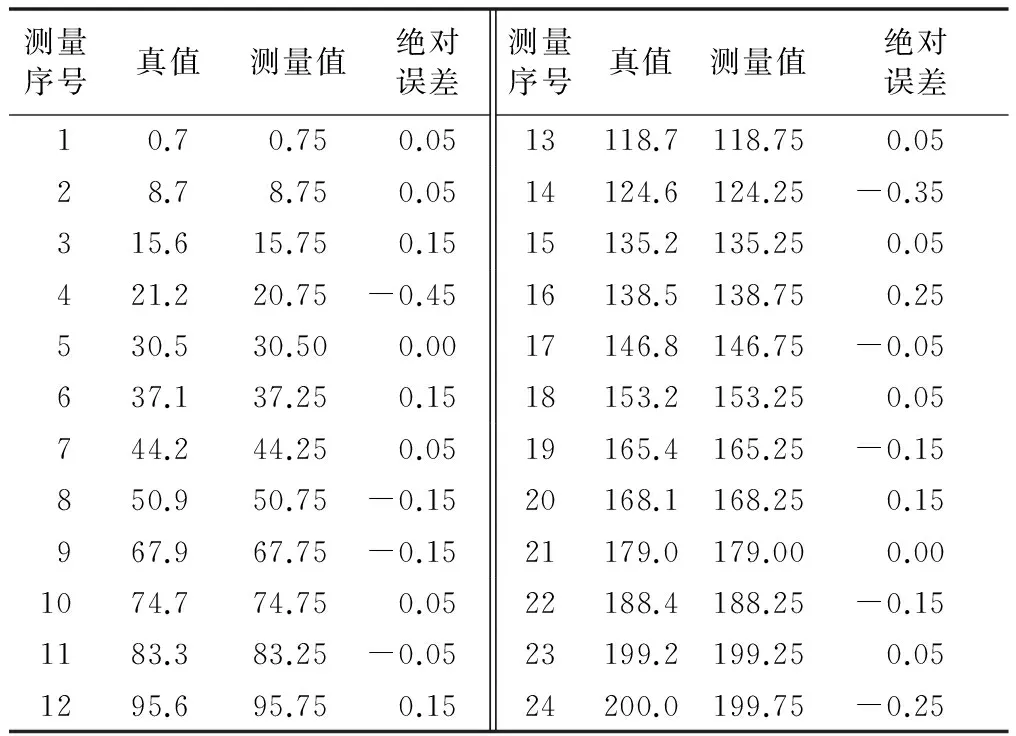
表1 样机测试试验结果
测量点绝对误差分布图如图6所示。
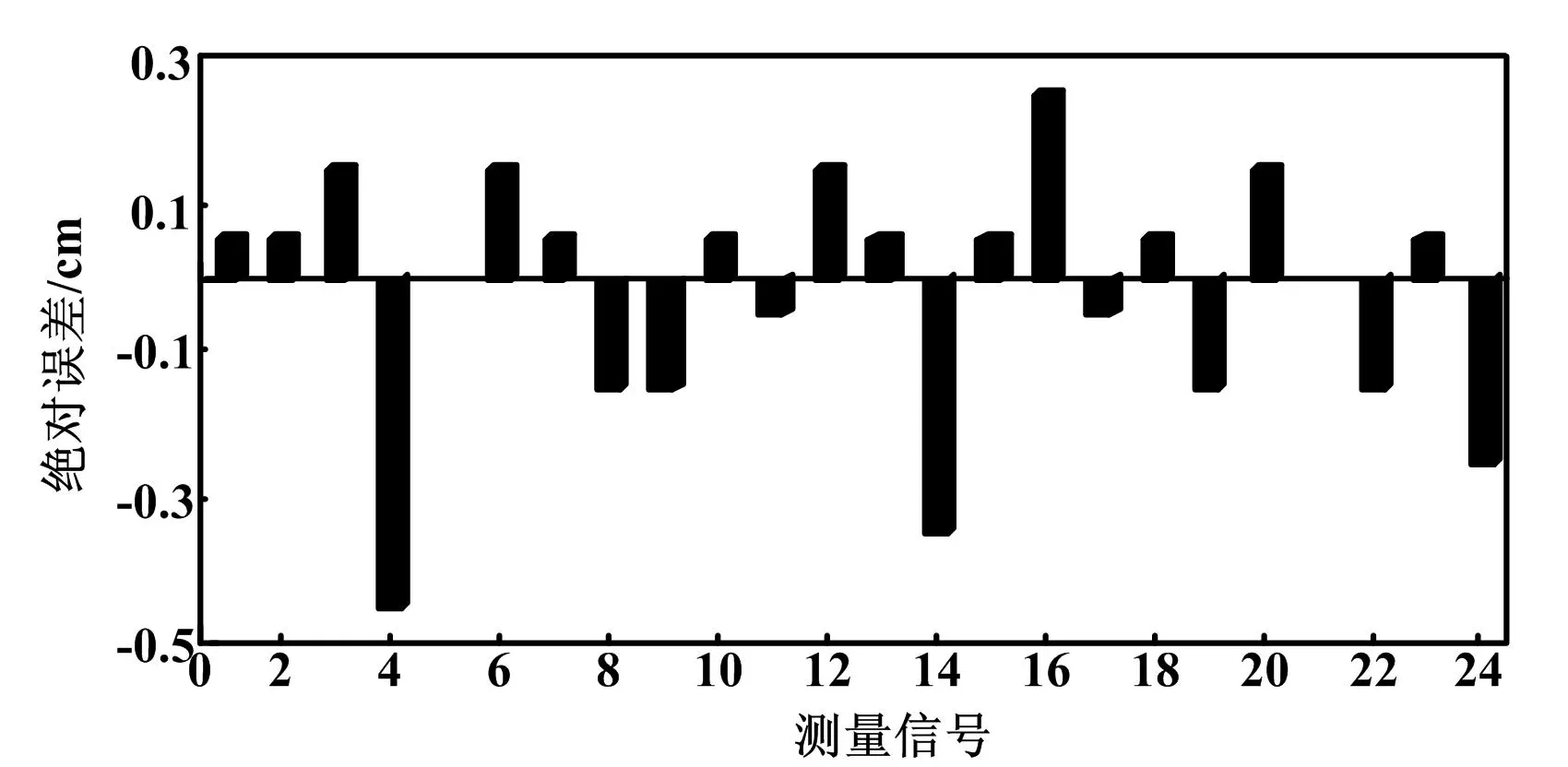
图6 测量序号点绝对误差分布图
经过分析,发现测试过程中出现了3个异常点(测量序号为4、14、16),即激光头发生了偏转,没能正确照射到相应位置的光敏电阻,但绝对误差仍保持在±0.5 cm范围以内。由此可知,样机中传感部分的位置误差小于±0.5 cm,分辨率为0.5 cm。
本文设计制作的样机将“超级黑板”作为测试环境,选取了2 m(黑板长度)的被测范围,即将黑板中投影区域作为测试对象,其位置作为测试的主要参数。测试条件为:额定工作电压为12 V的步进电机带动的同步带转动,测得其精度约等于0.25%,同样满足上述的误差范围和分辨率。文献[14]中提到的缝隙搜救机器人利用重建轨迹与模拟废墟的定位方法,在长为3.4 m的测量范围内精度达到20 cm以内。比较得出,本文在精度方面得到了显著的提升。在样机的工作中,“超级黑板”的同步带在步进电机的驱动下存在一定的震动,样机仍能不受影响地测量,满足抗震性的要求。经过样机测试,以STM32为核心的控制器结合矩阵键盘式电路,缩短了位置测量的时间,达到了实时输出位置信号的要求,运行高效且价格低廉。样机克服了文献[2]中所述的传感器部分局限,较好地解决了“超级黑板”中白色投影区域精确定位的问题。
6 结束语
针对“超级黑板”应用时所涉及的现阶段定位传感技术的缺陷(如测量范围短,且存在盲区;非线性的特点影响测量;测量时要求稳定的环境,不能存在震动干扰等),分析了现阶段常用的测距定位传感器,设计开发了一种可抗震型光电定位系统。该系统可适用于测量范围较大且要求在测量范围内无盲区(整个被测范围内保持一定的精度),或测量空间狭小且存在一定的震动的特殊应用环境。本系统通过光敏电阻的排布形成矩阵键盘式电路,节约了I/O口的资源;设计了放置激光头的卡槽,使被测物体可以存在一定范围的震动;并且通过软件设计达到了实时输出数字位置信号的功能。制作样机,选取2 m的测试范围,系统位置误差能保持在±0.5 cm的范围以内,且保持约为0.25%的精度。该系统还存在缺陷,即其误差受光敏电阻本身体积限制,且物体震动范围不能过大。因此下阶段,一方面可以寻找体积更小,光电效应更良好的光敏电阻;另一方面,可以改进激光头卡槽的结构以提高抗震的效果。
[1] 王鲁旭.教学用板书投影装置:201410727124.X [P].2015-02-25.
[2] 李戈,孟祥杰,王晓华.国内超声波测距研究应用现状[J].测绘科学, 2011,36(4):60-62.
[3] 张松,张亚.基于m序列的无串扰超声波测距系统[J].电子测量技术,2015,38(10):22-27.
[4] 马宏平,蒋励,宋竹青.多方向红外测距新型智能导盲杖[J].光学仪器, 2012,34(5):84-88.
[5] 糜小涛,于宏柱,高键翔.大型衍射光栅刻划机微定位系统控制器设计[J].仪器仪表学报,2015,36(2):473-480.
[6] 安慰宁,张福民,吴翰钟.一种基于飞秒光频梳频域干涉的绝对测距方法[J].仪器仪表学报,2014,35(11):2458-2465.
[7] HUANG Y,ZHOU C.Overview on optical measurements of shaft diameter detection[C]//Proceedings of International Conference on Information Sciences,Machinery,Materials and Energy(ICISMME 2015),2015:953-956.
[8] 沙爱军.基于单片机的超声波测距系统的研究与设计[J].电子科技,2009,22(11):57-61.
[9] 李胜,倪卫宁.阈值迭代超声波测距系统设计[J].自动化仪表,2014,35(2):24-26.
[10]DUAN F J,YANG B,YE S H.New optic fiber interferometer system for absolute distance measurement[C]//Proceedings of the Second International Symposium on Instrumentation Science and Technology,2002.
[11]周美丽,白宗文.基于2D-PSD的激光位移测量系统设计[J].国外电子测量技术,2015,34(2):64-66.
[12]毕继耀,张大伟,杨海马.线阵CCD光谱分辨率检测系统设计[J].电子测量与仪器学报,2015,29(7):1086-1092.
[13]郑采君.基于CPLD的矩阵键盘扫描模块设计[J].电子设计工程,2010,18(10):169-175.
[14]邱亚,沈林勇,胡卫建.缝隙搜救机器人镜体的形状重建和定位方法[J].仪器仪表学报,2015,36(12):2782-2789.
Design of the Anti-Vibrate Photoelectric Positioning System for Super Blackboard
ZHANG Jiahui1,2,GUO Hualiang3,XU Zhiyu1,ZHAO Mingyan4
(1.College of Electronics and Information Engineering,Tongji University,Shanghai 201804,China;2.Department of Electrical,Electronic and Information Engineering,University of Bologna,Bologna 40136,Italy;3.Institute of Information Science and Engineering,East China University of Science and Technology,Shanghai 200237,China;4.College of Mechanical and Electrical Engineering,China Jiliang University,Hangzhou 310018,China)
In view of the positioning requirement in application of “Super Blackboard”,an anti-vibrate photoelectric positioning system has been developed.Making use of microcontroller STM32F103 as the main control chip;and selecting photosensitive resistance to detect the light;the matrix keyboard circuit is designed to save the resources of I/O ports,and shorten the time of positioning;meanwhile;the cooperation of the chips and the circuits makes the system possess the ability of outputting the digital information of position in real time.With the structure of slots and the installation of the laser head,the system is suitable for following working environments: these are large range of measurement and no blind area exists in the range of measurement (keeping a certain precision in the whole range being measured), and the space of measurement is narrow and a certain vibration exists.The test results of the prototype show that in the case of 2 m measurement range,the system keeps the output error of the position within ±0.5 cm,i.e.,the precision is up to 0.25%.
Super blackboard; Anti-vibrate; Photoelectric positioning; STM32; Sensor; Matrix keyboard; Scan reading
浙江省大学生科技创新活动计划基金资助项目(2015R409003)、上海市重点课程建设基金资助项目
章佳辉(1993—),男,在读硕士研究生,主要从事智能控制方向的研究。E-mail:karlzhangjh@163.com。 徐志宇(通信作者),男,博士,高级工程师,主要从事智能控制理论及应用研究。E-mail:xuzhiyu@tongji.edu.cn。
TH-39;TP274
A
10.16086/j.cnki.issn1000-0380.201708003
修改稿收到日期:2017-02-27
猜你喜欢
导航定位学报(2022年4期)2022-08-15
西安航空学院学报(2021年1期)2021-07-24
科学家(2021年24期)2021-04-25
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14
物理实验(2020年11期)2020-11-30
电子制作(2019年13期)2020-01-14
科学(2020年3期)2020-01-06
电子制作(2017年7期)2017-06-05
电子技术与软件工程(2016年20期)2016-12-21
太空探索(2014年1期)2014-07-10
