无人机激光雷达与摄影测量林业应用研究进展*
2017-08-30 14:24刘清旺李世明李增元符利勇胡凯龙
林业科学 2017年7期
刘清旺 李世明 李增元 符利勇 胡凯龙,2
(1.中国林业科学研究院资源信息研究所 北京 100091; 2.中国矿业大学地球科学与测绘工程学院 北京 100083)
无人机激光雷达与摄影测量林业应用研究进展*
刘清旺1李世明1李增元1符利勇1胡凯龙1,2
(1.中国林业科学研究院资源信息研究所 北京 100091; 2.中国矿业大学地球科学与测绘工程学院 北京 100083)
森林空间结构及动态变化规律对森林经营管理、生态环境建模等具有重要意义,无人机激光雷达与摄影测量能够获取丰富的森林空间结构和类型信息,在单木、林分尺度森林环境长时间序列监测方面具有无可比拟的优势。无人机激光雷达系统一般搭载多回波/全波形激光扫描仪,配备高精度全球导航卫星系统&惯性测量单元 (GNSS & IMU)等传感器,以保证激光脉冲回波信号的几何定位精度。无人机摄影测量系统通常搭载可见光(RGB)/多光谱相机,配备低精度GNSS & IMU,通过高重叠率航片的三维重建算法自动解算航片内外方位元素,生成具有相对参考坐标的图像及点云,采用地面控制点(GCPs)、参考影像等方式进行几何精校正,对于连续覆盖的森林区域,使用高精度GNSS、稳定平台等可以提高图像匹配精度。通过单木分割法可以提取单木结构信息,从激光雷达点云或摄影测量重建点云中识别树冠顶点、树冠边界、位置等属性,也可以将点云投影到体元空间或者生成冠层高度模型(CHM),在此基础上识别单木特征。林分结构信息提取常采用高度分布法,从点云中直接计算高度分位数、回波指数等点云特征量,或者按照指定的高度间隔生成频率或强度合成波形,计算波形分位数、波形前沿、波形后沿等波形特征量,根据点云特征量、波形特征量与地面测量值之间的关系估测森林结构参数。激光雷达点云和摄影测量重建点云均能用于提取林下地形,对于低郁闭度区域二者相差不大,对于高郁闭度区域摄影测量重建点云提取的林下地形精度较低。多时相无人机激光雷达和摄影测量相结合,可以监测人工修枝、择伐、火灾、病虫害等引起的森林结构变化以及枝叶生长、落叶等物候变化。无人机激光雷达与摄影测量提取的森林结构参数精度受采集方式、数据处理算法、森林生长季节、地形等因素影响,尚未形成适合林业推广应用的成熟技术体系。无人机系统飞行应当遵照国家/当地法律法规以及相关规定条款的约束,我国按照空机质量、起飞全重等指标对无人机进行分类管理。未来无人机数据获取与处理系统将更加智能化、微型化、低成本化,更好地满足林业应用业务需求。
无人机; 激光雷达; 摄影测量; 点云; 森林
森林是陆地生态系统的主体,在维护区域生态环境及全球碳平衡、缓解全球气候变化等方面发挥着不可替代的作用 (Hyyppaetal., 2008),森林空间结构及动态变化规律研究对森林经营管理、生态环境建模及碳循环分析具有重要意义 (Waseretal., 2015; Dandoisetal., 2015)。森林空间结构的自然变化特征主要受树木生长状况控制(如树高的增加、树冠尺寸的增加、树冠之间空隙的减少等),年积温、水分胁迫、立地条件等外部因素会直接影响树木的生长状况。另外,人工修枝、间伐/择伐、森林病虫害传播、外来物种入侵、林火、风灾、冰冻雪灾等均会直接影响森林结构变化 (McElhinnyetal., 2005)。
传统森林空间结构地面测定方法仅能得到一些点上数据,很难及时获取区域范围森林参数的空间分布信息,而快速发展的遥感技术能够满足此应用需求 (Maseketal., 2015; Waseretal., 2015; Ginzleretal., 2015)。遥感图像光谱信息具有良好的综合性和现势性,能够反映森林空间分布的变化特征,激光雷达 (light detection and ranging, LiDAR) 在森林垂直结构测量方面具有无可比拟的优势,将遥感图像、激光雷达数据与地面测量得到的样点数据相结合,可以更精准地获取大范围森林类型及三维空间结构的分布特征,通过多时相遥感数据序列分析森林结构的动态变化规律。
近年来,无人机 (unmanned aerial vehicle, UAV; unmanned aerial system, UAS) 遥感技术的快速发展,在全球范围内引起了广泛关注,很多组织机构或个人开始研制、集成多种形式的无人机遥感系统 (Floreanoetal., 2015; 范承啸等, 2009; 金伟等, 2009; 李德仁等, 2014),用于快速地形测量、地表变化监测等业务 (Schereretal., 2008; Xiangetal., 2011; Zhouetal., 2012; Wattsetal., 2012; Colominaetal., 2014)。针对我国森林资源调查业务来说,需要在全国范围内定期观测森林样地,无人机遥感具有广阔的应用前景,特别是对于不易到达的区域,无人机具有更为显著的优势。
1 无人机遥感系统
无人机遥感系统主要由无人飞行器、遥感载荷、地面控制站和通信数据链组成 (Wattsetal., 2012; Colominaetal., 2014; Pajares, 2015),最早用于辐射污染、危险区、恶劣环境探测任务 (Wattsetal., 2012),后来用于监测森林 (Hernández-Clementeetal., 2012; 许子乾等, 2015)、农作物 (Zarco-Tejadaetal., 2013; Córcolesetal., 2013; 王利民等, 2013; 汪沛等, 2014; 张波等, 2015)、土地变化 (Mesas-Carrascosaetal., 2014)、野生动物 (Ditmeretal., 2015; Liuetal., 2015)、冰川 (Immerzeeletal., 2014)、温室气体 (Bermanetal., 2012)、灾害 (Martínez-de Diosetal., 2006; Olleroetal., 2006; Karmaetal., 2015; 周洁萍等, 2008; 胡根生等, 2014; 张增等, 2015)、环境保护 (杨海军等, 2015; 洪运富等, 2015) 等。无人机与有人机、卫星遥感应用相比,使用成本低,空间分辨率更高,在选择适用载荷、时间及空间分辨率方面更加灵活 (Dunfordetal., 2009; Zhangetal., 2012; 秦博等, 2002)。
1.1 无人机类型
无人机一般分为多旋翼、固定翼和无人直升机等类型 (王峰等, 2010; 李德仁等, 2014)。多旋翼无人机能够垂直起降,负载能力有限,旋翼数量从3个到十几个不等,随着旋翼数量增多,无人机的飞行和起降稳定性增加,但是也增加了制造成本; 固定翼无人机的起飞方式包括手抛式、弹射式、跑道式等,其体积、巡航速度、负载能力差异很大,固定翼转弯时不如多旋翼灵活,不适合狭窄空间的观测任务; 无人直升机同样能够垂直起降,负载能力通常优于多旋翼无人机,但是可操控性相对困难些 (Colominaetal., 2014)。Watts等(2012)按照无人机尺寸、航时和负载等特征,将无人机分为微型、垂直起降型、低空短航时、低空长航时、中空长航时、高空长航时等类型,搭载不同类型的传感器执行遥感任务。
微/轻型无人机一般指质量/体积小的无人机,优点是携带方便,能够高效获取精细尺度的高空间和高时间分辨率数据,例如传统森林样地面积或几平方千米面积,用于监测森林冠层间隙分布、树冠尺寸、森林病害程度等 (Lehmannetal., 2015; Getzinetal., 2014; Díaz-Varelaetal., 2015),能够测量三维结构的无人机越来越多地用于森林结构的变化分析 (Dandoisetal., 2013; Liseinetal., 2013; Wallaceetal., 2014a; 2014b; 2014c; 2016)。
无人机飞行应当遵照国家/当地法律法规以及相关规定条款的约束。我国出台了一系列无人机系统运行及驾驶员管理相关试行/暂行规定,按照空机质量、起飞全重等指标对无人机进行分类管理,其中对于Ⅰ类 (起飞全重≤1.5 kg) 和Ⅱ类 (起飞全重≤7 kg) 无人机,除重点区域和机场净空区外,在视距内 (半径500 m、相对高度低于120 m的区域) 运行时无须证照管理,其他类无人机应当使用电子围栏并接入无人机云。
1.2 无人机遥感载荷
无人机遥感载荷类似于有人机,包括可见光相机、多光谱相机、高光谱成像仪、热红外成像仪、激光雷达、微波雷达等,但是要求体积更小、自动化程度更高。无人机可见光载荷应用广泛 (Dandoisetal., 2010; 2013; Grenzdörfferetal., 2012),从普通相机到专业航空相机均可搭载到无人机平台上,特别是计算机视觉图像处理技术的快速发展,大大提升了光学图像数据的处理能力 (吕书强等, 2007)。无人机多光谱载荷提供了可见光、近红外等光谱波段,能够反映植被健康的光谱信息 (Bendigetal., 2012; Kelceyetal., 2012)。高光谱比多光谱具有更高的光谱分辨率,用于提取植被生化组分信息 (Rufinoetal., 2005; Zarco-Tejadaetal., 2013)。热红外载荷对温度变化反应敏感,用于林火监测或军事侦查等目的 (Rufinoetal., 2005; Scholtzetal., 2011)。无人机已经能够搭载微型激光雷达,用于直接测量植被三维结构 (Nagaietal., 2004; Choietal., 2009)。通过微波雷达P波段和X波段组合能够获取森林结构信息,但是需要解决雷达微型化问题,才能用于无人机遥感 (Essenetal., 2012; Remyetal., 2012)。
1.3 无人机激光雷达系统
无人机激光雷达系统通常配备激光扫描仪、高精度全球导航卫星系统&惯性测量单元 (global navigation satellite system, GNSS & inertial measurement unit, IMU) 和光学相机等载荷,激光扫描仪能够获取地物的三维点云数据,高精度GNSS & IMU提供姿态和位置信息,用于解算激光点三维位置,光学相机用于地物类型识别以及结构信息提取。随着微型激光扫描仪、GNSS & IMU集成系统的快速发展,出现了多种轻小型无人机激光雷达系统 (Nagaietal., 2004; 2009; Jaakkolaetal., 2010; Linetal., 2011),采用高精度GNSS & IMU是提高激光雷达定位精度的关键,集成GNSS & IMU的混合测量单元 (hybrid measurement unit, HMU) 已经能够达到厘米级定位精度 (Rehaketal., 2013),另外,低成本GNSS & IMU系统精度较低,采用GNSS双天线可以有效改善航向精度。无人机自动巡航系统能够实时地获取飞行器位置、速度和姿态信息,并反馈给飞行控制系统,使得飞行器沿着预定航线飞行,自动巡航开源框架包括Paparazzi、OpenPilot、ArduPilot等 (Colominaetal., 2014)。
几种典型无人机激光雷达的主要技术指标见表1,另外,也出现了一些其他形式的无人机激光雷达系统,由于缺少详细技术资料未列出。无人机激光雷达系统通常搭载数码相机,同时获取激光雷达和光学图像数据,提供精细的结构信息和光谱信息 (Nagaietal., 2004; 2009; Jaakkolaetal., 2010; Linetal., 2011)。Nagai等(2004; 2009) 开发了一种无人机激光雷达系统,包括GNSS & IMU系统、低频激光扫描仪、单反相机等,用于提取DSM和纹理特征。Jaakkola等(2010) 和Lin等(2011) 设计了一种轻小型无人机激光雷达系统 (FGI Sensei),包括GNSS & IMU集成系统、激光扫描仪、CCD相机、光谱仪和热红外相机,采用模块化设计,可以任意组合不同遥感传感器,并能用于车载移动制图。Wallace等 (2012; 2014a; 2014b; 2014c; 2016) 研制了一种低成本无人机激光雷达系统 (TerraLuma),包括GNSS & IMU系统、低频激光扫描仪、高清录像机等,用于森林资源清查。Gottfried等(2015) 和 Amon等(2015)介绍了一种RIEGL的无人机激光雷达系统(RIEGL VUX-SYS),包括GNSS & IMU集成系统、高频激光扫描仪、可见光相机等,面向林业等多种行业应用。另外,Velodyne 推出的激光雷达可以用于车载平台 (Glennieetal., 2013; Rejasetal., 2015) 和无人机平台 (Colominaetal., 2014; Tulldahletal., 2014; 2015),引起了广泛关注。
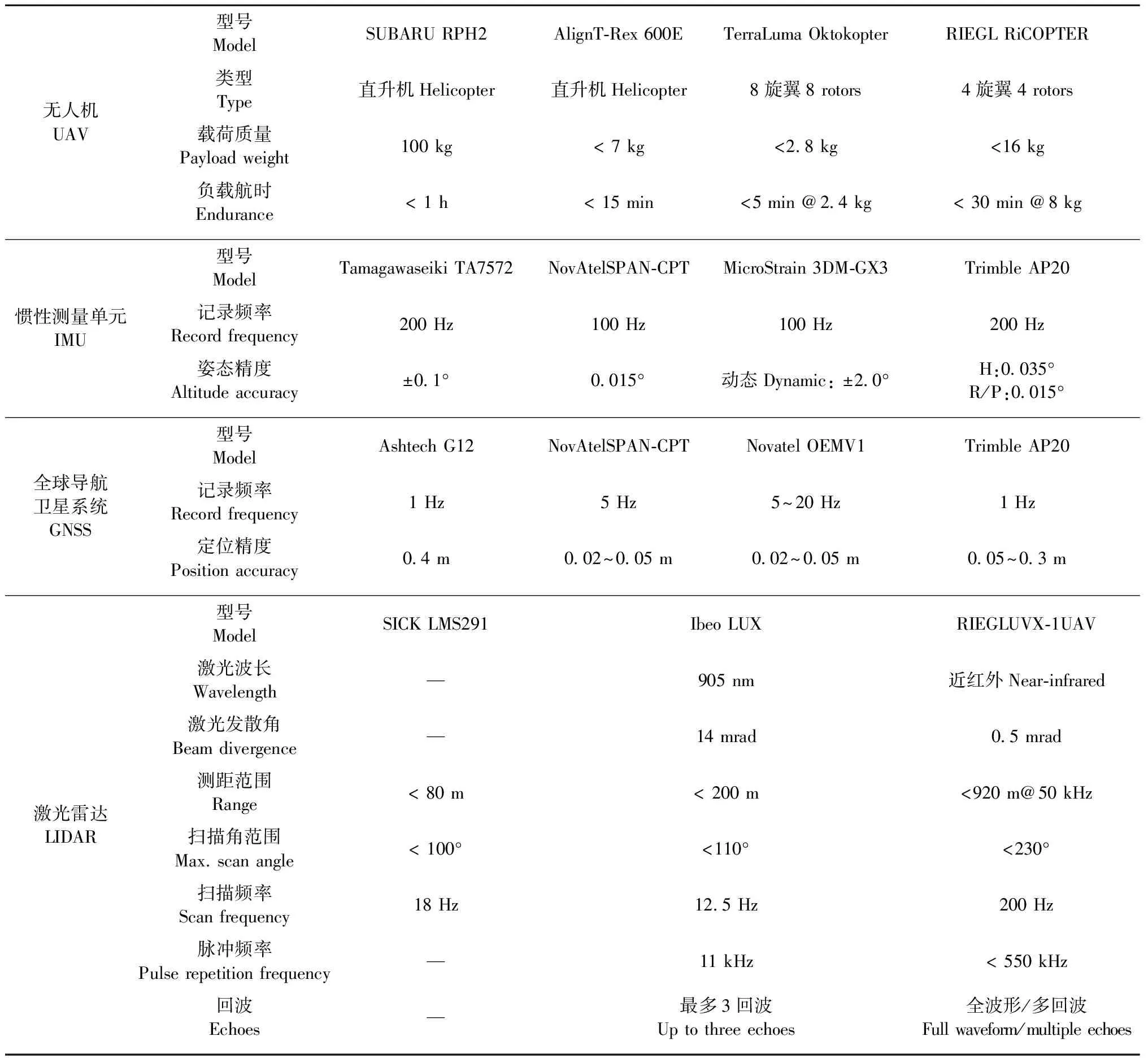
表1 典型无人机激光雷达的主要技术指标
无人机激光雷达与有人机相比,可以获取很高采样密度的观测数据,主要为离散的单回波或多回波点云;有些无人机激光雷达能够获取全波形数据,但在应用中多采用在线波形处理方式得到多回波点云数据 (Gottfriedetal., 2015; Amonetal., 2015)。
1.4 无人机摄影测量系统
无人机摄影测量系统通常配备普通相机、低精度GNSS & IMU等载荷 (孙杰等, 2003; 崔红霞等, 2005; 贾建军等, 2006; 李宇昊, 2007),普通相机一般具备自动连拍功能,低精度GNSS & IMU多用于自动巡航,不适于图像精确定位。无人机摄影测量平台可以选择固定翼、多旋翼或直升机,固定翼飞行速度快,适合于较大区域测量任务; 多旋翼或直升机飞行速度慢,转弯半径小,适合于小区域精细测量任务 (Shahbazietal., 2015)。Breckenridge等(2011; 2012) 比较了固定翼和直升机2种无人机,发现不同无人机平台得到的植被覆盖度估测结果与地面测量值的一致性很好。
无人机摄影测量一般通过高重叠率图像的自动匹配处理算法,自动解算图像内外方位元素,生成具有相对参考坐标的点云,几何精校正可采用地面控制点、参考影像&地形、航迹曲线匹配等方法 (Dandoisetal., 2010; 2013; Zhangetal., 2016)。基于地面控制点的方法通过高精度GPS或全站仪等仪器对地物特征点进行测量,获取控制点三维坐标; 基于参考影像&地形的方法通过参考影像获取典型特征对象的平面坐标,从地形数据中获取相应特征对象的高程坐标; 航迹曲线匹配方法使用无人机航迹与重建图像的相机位置轨迹匹配,由于图像重建点云的几何特征无法与参考数据几何特征进行精确匹配,因此校正精度一般为亚米级或米级 (Dandoisetal., 2010; 2013)。如Dandois等 (2010) 通过参考正射影像和激光雷达DEM 对图像重建点云进行几何校正 (平面定位精度<1.5 m,高程定位精度0.6~0.9 m); Lisein等 (2013) 通过参考正射影像和激光雷达DSM 对图像重建点云进行几何精校正; Zhang等(2016)通过地面GNSS测量的控制点对图像重建点云进行几何校正 (定位精度0.32~0.69 m); Dandois等(2013) 通过地面控制点和航迹曲线匹配方式对图像重建点云进行几何校正 (定位精度0.4~1.4 m)。
对于连续覆盖的森林区域,当从图像中很难识别典型同名点时,通过高精度GNSS & IMU数据可以有效提高匹配效果 (Turneretal., 2014; Zarco-Tejadaetal., 2014; Wallaceetal., 2016),在缺少高精度GNSS & IMU情况下,通过稳定平台可以提高定位精度 (洪宇等, 2008),或者通过图像和激光雷达数据自动配准方法提高定位精度 (Yangetal., 2015)。例如Zarco-Tejada等(2014) 使用图像同步GPS位置来保证图像三维重建点云定位精度; Wallace等(2016) 使用高精度GNSS数据得到较高的图像定位精度,不需要使用参考数据进行几何校正。另外,低精度GNSS在图像三维重建中可辅助筛选初始匹配图像,提高处理效率,但是无法保证定位精度(Liseinetal., 2013)。
2 森林结构信息提取
无人机获取森林三维空间结构的常用方式有2种 (Wallaceetal., 2016): 一是激光扫描 (Jaakkolaetal., 2010; Wallaceetal., 2012); 二是摄影测量 (Dandoisetal., 2013; Liseinetal., 2013)。激光扫描系统通过发射激光脉冲并接收探测目标后向散射信号的方式来测量地物的三维空间结构,摄影测量通过计算机视觉等图像三维重建技术得到点云,激光雷达和摄影测量点云能够用于提取典型的森林结构信息 (Jaakkolaetal., 2010; Wallaceetal., 2014a; 2014b; 2014c; 2016)。
2.1 无人机激光雷达森林结构
激光雷达能够穿透森林冠层,直接测量森林三维结构,在森林经营管理与生态系统研究中具有广阔应用前景 (Hyyppaetal., 2008)。传统机载激光雷达数据获取成本高,获取时间和范围受空域政策限制,同时气候条件进一步限制了有效观测时间,很难获取多时相激光雷达数据,对于森林灾害、落叶监测等时效性强的测量任务来说无法满足需求。无人机激光雷达操作灵活,特别是轻小型无人机具有便携性,可为森林结构研究和森林资源调查提供一个有效的技术手段。
无人机激光雷达数据获取与预处理流程包括航线设计、数据采集、GNSS & IMU数据预处理、点云数据解算、点云分类等 (Wallaceetal., 2012)。航线设计需要考虑点云密度、飞行高度、航线间隔、激光扫描角、激光最大测距范围、地形等因素,按照飞行区域,设定飞行器进入点和飞出点,确定航线方向。数据采集时选择控制点架设GNSS参考站,实时监测无人机工作情况,根据无人机续航能力及时调整返航时间,注意风向和风速的变化等外部环境因素。GNSS & IMU数据预处理根据GNSS流动站和参考站数据进行差分解算,并将GNSS精确位置数据与IMU姿态数据合成。点云数据解算根据激光扫描数据、精确位置和姿态数据得到激光点的精确位置。点云分类是将点云分为地面点、植被点等不同类别,用于森林结构信息提取。
无人机与有人机激光雷达提取森林结构信息的方法类似,激光雷达波形数据通过波形分解可以得到点云数据 (Liuetal., 2011),激光雷达点云数据提取森林结构信息的方法可分为单木分割法和高度分布法2种(Vauhkonenetal., 2011; Kaartinenetal., 2012),单木分割法根据单木空间形状特征识别树冠顶点、树冠边界、位置等属性 (Brandtbergetal., 2003; Maltamoetal., 2004; Kochetal., 2006; Lietal., 2012; 刘清旺等, 2008; 2010); 高度分布法 (也称基于面积的方法) 根据冠层高度分布特征与地面测量值之间的关系估测森林结构参数,如生物量、蓄积量、胸高断面积等 (Nsset, 2002; Holmgren, 2004; Packalénetal., 2007; Hudaketal., 2008)。单木分割法用于提取单木尺度结构信息,进而提取林分尺度结构信息; 高度分布法多用于提取林分尺度结构信息。
单木分割法的数据特征空间可以分为点云、体元和CHM 3种(Wallaceetal., 2014a),基于点云特征空间的方法直接使用原始/归一化点云进行分割,包括三角剖分算法、贝叶斯算法、局部最大值聚类算法等 (Alexander, 2009; Reitbergeretal., 2009; Lähivaaraetal., 2012; Lietal., 2012); 基于体元特征空间的方法将点云投影到体元空间,体元属性为体元内所包含的点个数,采用形态学算法识别树冠 (Wangetal., 2008; Vaughnetal., 2012); 基于CHM空间特征的方法使用CHM进行分割,为了消除伪树冠顶点和树冠凹陷点,分割之前一般进行CHM平滑处理 (Brandtbergetal., 2003; 2007; Kochetal., 2006; Popescu, 2007; Yuetal., 2011; 刘清旺等, 2008; 2010)。另外,基于混合空间特征的方法使用多种空间特征进行综合分析,如在平滑后CHM识别局部最大值,将其用作点云特征空间K均值聚类的种子点进行单木分割 (Morsdorfetal., 2003; Guptaetal., 2010)。
在无人机激光雷达提取单木尺度结构信息方面,Jaakkola等(2010) 通过无人直升机激光雷达(FGI Sensei) 获取高密度点云数据 (点云密度为100~1 500点·m-2),采用基于CHM的单木分割法提取树高和树冠形状,树高估测精度很高 (标准差约30 cm),并由树冠边界内点云数据生成26个特征量,通过随机森林算法估测胸径 (RMSE=2.1 cm); Lin等(2011)针对高密度点云数据提出了多尺度栅格化算法,用于识别单木树冠特征; Wallace等(2014a) 采用多旋翼无人机激光雷达获取了澳大利亚东南部4年生桉树(Eucalyptus)林点云数据 (50点·m-2),激光入射角限制为偏离天底方向±30°,通过分析5种单木分割法,发现基于CHM和原始点云的方法最优,能够探测98%以上的树木; Wallace等(2014b) 在桉树林重复性飞行试验中发现单木位置 (平均偏差 < 0.48 m) 和树高 (平均偏差 < 0.35 m) 精度很高,树冠面积和树冠体积依赖于分割算法。
高度分布法的数据特征空间可以分为点云和波形2种,基于点云特征空间的方法直接使用点云进行分析,计算相关统计或指数特征量,如不同的高度分位数、平均值、标准差、峰度、偏度、首回波郁闭指数、冠形郁闭指数等 (Goodwinetal., 2006; Wallaceetal., 2014b); 基于波形特征空间的方法是在一定空间范围内,按照指定的高度间隔进行点云数据进行统计,生成频率或强度合成波形,计算波形特征量,如波形分位数、波形峰值、波形前沿、波形后沿等。根据高度分布法提取的系列特征量,采用回归分析、机器学习等算法间接估测相关森林参数 (Zhaoetal., 2011; Gleasonaetal., 2012; García-Gutiérrezetal., 2015)。
在无人机激光雷达提取林分尺度结构信息方面,Wallace等(2014b) 通过重复性飞行试验分析了基于点云的林分变量稳定性,发现不同飞行方式的点云垂直分布差异很小,首回波的高度最大值很稳定,高度平均值、标准层、峰度和偏度的偏差较小 (< 0.05 m),较低高度分位数 (20%、 30%、 40%) 的偏差较大 (< 0.09 m); 首回波郁闭指数的偏差小于冠形郁闭指数的偏差。
无人机激光雷达飞行高度一般较低 (距离树冠顶部10~50 m),可以获取很高密度的点云数据,通过点云抽稀算法可得到不同采样密度的点云数据,用于分析点云密度对树冠探测结果的影响。Lin 等(2011) 通过对比分析原始点云 (100~1 500点·m-2) 和抽稀点云 (4点·m-2) 提取的树高,发现高点云密度能够明显改善树高被低估现象; Wallace等(2012) 采用多旋翼无人机激光雷达获取了点云数据 (50点·m-2),提取了单木位置、树高、冠幅和树冠面积,与抽稀点云 (8点·m-2) 提取的单木参量进行对比分析,发现随着点云密度增加,树高和树冠位置的标准差更小,探测到树冠顶点的概率更大,冠幅容易受激光发散角和激光入射角的影响; Wallace等(2014a) 在桉树林飞行试验中发现随着点云密度 (从5点·m-2到50点·m-2) 增加,可以明显减少单木漏检率。
2.2 无人机摄影测量森林结构
摄影测量通过图像三维重建获取植被表面的高度信息,由于摄影测量无法穿透森林冠层,很难获得林下地形信息。图像三维重建时要求图像具有很高的重叠率、便于识别的同名点以及适中的图像尺寸和空间分辨率 (狄颖辰等, 2011; 朱锋等, 2014)。随着低成本的轻小型无人机、高速连拍的数码相机以及基于计算机视觉的三维重建算法的快速发展,无人机摄影测量成为一种具有更低成本的森林结构测量方式,并同时提供不同森林类型的光谱信息,特别适合于获取小区域内的多时相观测数据 (Dandoisetal., 2013)。
常用的图像三维重建方法主要包括运动结构重建 (structure from motion, SfM) 和半全局匹配 (semi-global matching, SGM) 算法等,SfM将摄影测量和计算机视觉算法相结合,对于不同视角的重叠图像,自动提取图像特征、匹配特征和光束平差,不需要GNSS & IMU数据,一些常用图像三维重建软件包中封装了SfM算法,适合于处理具有高重叠率的无人机图像数据 (Snavelyetal., 2008; Dandoisetal., 2010; Turneretal., 2012; Otaetal., 2015; St-Ongeetal., 2015); SGM使用代价函数约束像元匹配的概率,采用全方向路径优化提高匹配效率 (Hirshmuller, 2008; Gehrkeetal., 2011; 2012; Whiteetal., 2015; Penneretal., 2015),遥感软件包 (remote sensing software package graz, RSG) 封装了SGM算法。典型图像三维重建软件见表2。
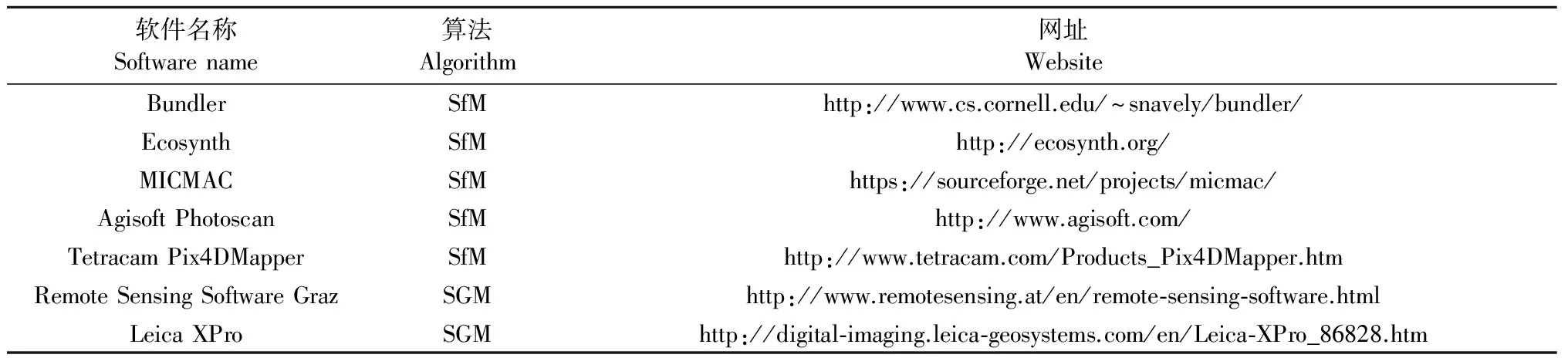
表2 典型图像三维重建软件
图像重建点云数据与激光雷达点云提取森林结构信息的方法类似,包括单木尺度和林分尺度结构信息提取相关方法。在无人机摄影测量提取单木尺度结构信息方面,Dandois等(2010) 使用风筝平台搭载的相机获取异龄林和同龄林航空图像,通过Ecosynth重建三维点云,图像重建CHM能够用于估测树高 (R2> 0.64),但是不如激光雷达CHM估测树高的精度高 (R2> 0.82); Zarco-Tejada等(2014) 分析了固定翼无人机获取的橄榄树(Oleaeuropaea)近红外图像,通过Pix4UAV进行三维重建,从图像重建DSM中获取树木高度信息,与地面实测树高相关性很好 (R2=0.83, RMSE=35 cm)。
在无人机摄影测量提取林分尺度结构信息方面,Zahawi等(2015) 通过多旋翼无人机获取了热带林航空图像,采用Ecosynth生成图像三维点云,根据CHM特征量 (高度均值、最小值、最大值、标准差、分位数等) 分析冠层高度、地上生物量等因子,并分析冠层孔隙度、粗糙度等因子,评价森林恢复情况并预测食果性鸟类的分布; Zhang等(2016) 通过多旋翼无人机获取了亚热带常绿阔叶林航空图像,采用Pix4dmapper生成图像三维点云,根据不同尺度的CHM特征量 (高度均值、标准差、偏度、垂直分布比率、郁闭度等),分析物种丰富度、香农多样性指数、物种均匀度、林分断面积等因子,发现无人机冠层变量能够很好反映局地生物多样性模式,林分断面积与郁闭度呈正相关; Ni等(2015)通过多旋翼无人机获取了北方森林航空图像,采用Agisoft Photoscan重建图像三维点云,对比分析摄影测量CHM和激光雷达CHM,发现样地尺度森林高度相关性很好 (R2=0.87, RMSE=1.9 m)。另外,White等(2015) 采用RSG对高空航空图像进行三维重建 (点云密度为12.27点·m-2),由于旁向重叠率太低,仅使用航向图像进行匹配,图像重建点云减去激光雷达DEM得到地形归一化点云,按照坡度和郁闭度变化进行分层分析,图像重建点云与激光雷达点云特征量在统计上差异显著,胸径加权高差异最大,模型结果与坡度、郁闭度之间不存在趋势性。
2.3 无人机激光雷达与摄影测量综合分析森林结构
无人机激光雷达对森林冠层具有穿透性,能够准确地获取森林冠层内部结构及林下地形信息,但是获取的光谱特征比较单一; 无人机摄影测量能够获取更为丰富的图像光谱特征,通过图像三维重建可以精细地观测森林冠层上表面的空间分布特征,透过冠层之间的空隙获取部分内部结构及林下地形信息,将无人机激光雷达和摄影测量相结合,可以弥补单一测量方式的不足 (Liseinetal., 2013; Wallaceetal., 2016)。
无人机激光雷达与摄影测量的结合方式一般是由激光雷达提取地形,将摄影测量点云减去激光雷达地形得到摄影测量归一化点云,再提取森林结构相关信息。Lisein等(2013) 使用固定翼无人机近红外相机获取橡树(Quercuspalustris)林和云杉(Piceaasperata)林航空图像,通过MICMAC提取点云数据,由图像重建DSM减去激光雷达DEM得到图像重建CHM,与激光雷达CHM进行对比分析,发现图像重建CHM能够很好地估测林分和单木变量; 许子乾等 (2015) 分析了固定翼无人机获取的亚热带森林航空图像,使用Pix4D进行三维重建,并结合激光雷达DEM估测林分特征,发现胸径加权高的敏感性最高,蓄积量次之,林分密度和胸高断面积最低。另外,无人机激光雷达点云和摄影测量点云也可以合成在一起,再用激光雷达点云处理方法提取森林结构相关信息。
无人机激光雷达和摄影测量容易受森林郁闭度的影响,Wallace等(2016) 使用多旋翼无人机激光雷达和相机集成系统同步获取了桉树林激光雷达点云和图像数据,采用Agisoft Photoscan从图像重建三维点云,对比分析无人机激光雷达和摄影测量获取的森林结构,结果发现对于低郁闭度区域,2种方法均能够提供地形和冠层特征信息,随着郁闭度增加,激光雷达能够得到更高精度的垂直结构信息。
3 森林变化监测
森林变化主要指在一定时间间隔内,由于森林自身的生长演替、外部干扰等因素引起的森林结构、组成成分等变化,多时相无人机激光雷达与摄影测量可以用于监测多种形式的森林变化,包括森林物候变化、人工干扰引起的结构变化等。由于无人机激光雷达获取成本要高于摄影测量,一般采用无人机或有人机激光雷达获取不易变化的林下地形信息,采用无人机摄影测量获取多期森林结构信息,2种技术相结合实现森林变化监测。对于森林冠层的内部结构变化监测,无人机摄影测量通常不能准确地观测这种变化,需要采用多时相无人机激光雷达进行监测。
3.1 森林物候变化
森林物候变化具有季节性,如冬季落叶期、早春/春季变绿期、夏季旺盛期、早秋衰变未落叶期和秋季衰落期等,对于落叶阔叶林或针叶林来说,不同季节枝条上叶片大小和叶量多少将直接影响激光雷达和摄影测量的点云密度,并影响森林结构因子的估测精度。Dandois等(2013) 使用多旋翼无人机可见光相机获取落叶林生长季和落叶季的航空图像,飞行平台距离树冠约40 m,通过Agisoft Photoscan重建三维点云 (点云密度30~67点·m-2),分析不同季节图像重建点云提取的DEM对森林结构的影响,发现生长季图像重建点云使用落叶季图像重建DEM和激光雷达DEM得到树高精度都很高,使用生长季图像重建DEM的树高精度要低一些; 另外,还选择6种典型物候期进行观测,发现冠层相对绿度与MODIS NDVI时间序列高度相关。
3.2 森林结构变化
多时相无人机激光雷达能够准确地测量人工干扰引起的森林结构变化,如人工修枝、择伐等森林经营管理措施,进而用于分析森林生物量、蓄积量等因子变化。Jaakkola等(2010) 选择苏格兰松(Pinussylvestris)进行多时相激光雷达试验,分析枝叶的生物量变化,试验过程分为7个阶段,每个阶段手工去除部分枝叶,并对去除的枝叶称重,使用无人机激光雷达观测去除枝叶后的松树,将松树回波点数与地面回波点数的比值作为预测变量,与减少的枝叶生物量建立关系,发现二者之间的相关性很高 (R2=0.92)。Wallace等(2014c) 通过无人机激光雷达分析4年生桉树人工林修枝效果,按照5组比率对样地中随机选取的树木进行修枝,提取每个修枝阶段的枝下高,探测结果出现波动性,探测修枝率与实测修枝率相比在96%~125%之间。
3.3 森林灾害监测
森林灾害是林火、病虫害等外部因素引起的森林减少现象,无人机摄影测量能够用于森林灾害监测和辅助决策,通过图像识别方法提取林火点、烟雾或火场范围、受害木等。无人机在林火发生前用于监测植被和评估水分胁迫和火险等级,起火过程中用于林火探测、火情确认、定位和监测,过火后用于估测过火区并评价林火影响 (Olleroetal., 2006)。Ambrosia等(2003) 介绍了一种用于灾害监测的无人机多光谱热扫描成像仪,在林火漫延时间范围内能够近实时传输几何校正后的图像给灾害管理人员; 杨斌等 (2009) 实现了一种无人机遥感图像中烟的识别方法; 马瑞升等 (2012) 设计了一种无人机林火监测系统,对火场影像进行聚类分析,实时识别烟雾特征; 张增等 (2015) 通过无人机图像进行森林火灾监测,筛选具有林火的图像,采用支持向量机进行识别火灾区域。另外,何诚等 (2014) 通过无人机摄像系统对林火点进行定位,根据无人机搭载的RTK GPS和微波测距仪计算林火点位置,定位误差10 m以内。
为了监测大范围的林火或从互补视角获取林火信息,可以将多个无人机进行编队,协同获取林火信息。Martínez-de Dios等(2006) 介绍了一种用于林火监测的无人机编队,由2个直升机和1个飞艇组成,搭载了1个可见光微型相机、1个近红外微型相机和1个林火传感器,对于可见光和近红外图像采用不同的林火识别算法; Merino等(2005) 提出了一种适合多无人机编队的协作林火探测方法,采用计算机视觉技术在近红外和可见光图像和其他数据中识别和定位林火; Merino等(2006) 提出了一种适合多无人机编队的协作感知系统,考虑了近红外、可见光和火探测器3种传感器,包括图像分割、序列图像稳定性保持、地理校正、协作感知融合等功能,用于林火探测和监测; Merino(2010) 进一步介绍了用于林火监测的无人机编队系统,其中包括决策系统和感知系统,决策系统用于任务分配、任务规划和协调,感知系统用于集成林火传感器信息,无人机搭载了近红外和可见光相机,通过基于训练的阈值法在线提取林火信息; Karma等(2015) 使用无人机和地面交通工具模拟了林火搜救场景,3种无人机 (固定翼、直升机和多旋翼) 用于巡逻、火漫延监测、新火点制图、预警和地面工具配合等,通过空气质量监测和危险区搜寻可以显著提高人员安全性,存在的缺陷为交通工具的耐热性、大风和湍流环境中的飞行能力、复杂地形环境中的通信中断等。
无人机在森林病虫害应用方面,通常在获取的航空图像上采用人工判断或图像识别等方式提取受害木信息。如胡根生等 (2013; 2014) 通过无人机平台搭载的2个光谱相机获取了针叶林可见光和近红外遥感图像,采用改进的加权支持向量数据描述 (WSVDD) 和改进的加权小波支持向量数据描述 (WWSVDD) 识别病害松树,与K近邻和支持向量数据描述分类方法相比,WWSVDD方法准确性更高。
4 林下地形提取
激光雷达能够穿透森林冠层直接测量林下地形,对于高精度大区域地形制图来说具有无可比拟的优势,欧美一些国家开始使用激光雷达生产区域或全国DEM产品 (Mengetal., 2010)。摄影测量能够精确地获取裸露地表的高程信息,对于植被覆盖区来说,由于植被遮挡显著降低了地形的测量精度 (Whiteetal., 2013)。摄影测量提取地形信息时,一般根据图像三维重建算法生成摄影测量点云,采用类似于激光雷达点云的方法提取地形信息 (Dandoisetal., 2010; 2013; Whiteetal., 2013; 2015)。
4.1 无人机激光雷达林下地形
激光雷达点云提取地形信息时通常根据点云之间的空间位置关系,采用不同的点云分类算法将回波点分为地面点和非地面点,由离散地面点内插生成DEM栅格。Meng等(2010) 将区分地面点和非地面点的地面滤波算法分为6类,即分割/聚类、形态学、方向扫描、等高线、TIN和插值,选择地面滤波算法时应考虑最优回波 (首回波、中间回波、末回波) 和局部邻域等因素。激光雷达点云提取地面点常用算法是渐近TIN密化算法 (Hyyppaetal., 2008; Wallaceetal., 2014a),基本思路是根据点云高程局部最小值生成初始地面点TIN表面模型,反复迭代搜索位于角度和距离阈值范围内的地面点,更新地面点TIN表面模型 (Axelsson, 1999; 2000)。Wallace等(2014a; 2014b) 采用渐近TIN密化算法从无人机激光雷达点云中区分地面点,地面滤波时仅使用了点云数据中的单次和末次回波,多次回波中的首次和中间回波被分为非地面点,由自然邻域内插算法生成DEM栅格,通过重复性飞行试验对比分析,发现不同数据集DEM之间的差值不大(<0.39 m)。
4.2 无人机摄影测量林下地形
无人机摄影测量提取林下地形时需要根据图像三维重建算法生成离散点云,由地面滤波算法识别地面点并内插生成DEM栅格。Dandois等(2010) 使用异龄林和同龄林航空图像进行三维重建,通过图像重建点云DEM与激光雷达DEM进行对比,发现由于森林冠层遮挡影响,图像重建DEM精度偏低; Dandois等(2013) 使用落叶林生长季和落叶季的航空图像进行三维重建,通过生长季和落叶季图像重建DEM与激光雷达DEM进行对比,发现落叶季图像重建DEM精度 (RMSE为0.89~3.04 m) 比生长季图像重建DEM精度 (RMSE为2.49~5.69 m) 高一些,对于图像重建DEM与激光雷达DEM之间的差值来说,森林覆盖区比非森林区域的DEM差值大; Wallace等(2016) 使用桉树林航空图像进行三维重建,图像重建DEM和激光雷达DEM总体上差异不大 (差值平均为0.09 m),对于高郁闭度区域,图像重建DEM不如激光雷达DEM精确。
5 讨论与展望
无人机激光雷达和摄影测量技术在林业中已经开展了一些试验研究,用于测量单木/林分尺度的结构特征,监测森林恢复、森林经营管理活动等,但是不同的无人机平台、传感器数据获取能力、数据采集模式、森林类型、森林物候特征、地形变化、光照条件等复杂因素均会影响森林信息提取精度,对于林业生产经营管理业务来说,尚未形成适合推广的成熟技术体系。
无人机激光雷达能够直接测量森林结构和林下地形,测量精度受激光采样密度、几何定位精度、航带匹配精度、数据处理算法等因素影响; 多时相激光雷达测量森林结构变化的误差还受不同时相激光雷达数据配准误差的影响。激光雷达探测常绿森林时,激光脉冲与森林冠层中的枝叶相互作用,叶子有效增加了后向散射截面,可以很精确地测量树冠上层的结构特征; 激光雷达探测落叶森林时,由于树冠内枝干的有效后向散射面积多小于叶簇的相应面积,导致枝干后向散射信号太弱,不能被激光雷达探测到,主要为来自地面的后向散射能量。
无人机摄影测量通过图像三维重建点云来实现对森林空间结构的测量,测量精度受图像重叠率、图像分辨率、匹配算法、点云密度、几何定位精度、地形起伏等因素的影响 (St-Ongeetal., 2008; Hirshmuller, 2008; Whiteetal., 2013)。由于树冠之间相互遮挡的影响,图像三维重建仅能得到冠层表面的高度信息,很难得到林下地形信息,通常结合激光雷达获取的林下地形得到摄影测量冠层高度。对于常绿森林来说,摄影测量通过图像匹配得到冠层上表面枝叶的同名点,冠层内部和林下地表的同名点很少; 对于落叶森林来说,枝干对地面的遮挡很少,比较容易得到来自地面的同名点,来自枝干同名点的数量依赖于图像分辨率。
无人机激光雷达与摄影测量相结合可以弥补相互之间的不足,对于多时相森林动态变化监测、植被生长状况监测等长时间序列测量任务来说,考虑到林下地形很少变化,不同时间的森林结构变化较大,且激光雷达的获取成本要高于光学图像,采用激光雷达获取林下地形,摄影测量获取时间序列森林表层结构信息,保证激光雷达与摄影测量数据位置匹配精度的情况下,分析森林结构变化规律。
随着无人机系统负载、航时、稳定性等性能进一步提高,激光雷达、高精度GNSS & IMU、光学相机等遥感载荷的微型化、低成本化,以及相关数据处理软件自动化程度的提高,将使得无人机遥感系统在林业中的应用范围更为广阔,以期服务于国家森林资源调查、重大工程监测、生态环境监测等业务需求。
崔红霞, 林宗坚, 孙 杰. 2005. 无人机遥感监测系统研究. 测绘通报, (5): 11-14.
(Cui H X, Lin Z J, Sun J. 2005. Research on UAV remote sensing system. Bulletin of Surveying and Mapping, (5): 11-14.[in Chinese])
狄颖辰, 陈云坪, 陈莹莹, 等. 2011. 无人机图像拼接算法综述. 计算机应用, 31(1): 170-174.
(Di Y C, Chen Y P, Chen Y Y,etal. 2011. Survey on image mosaic algorithm of unmanned aerial vehicle. Journal of Computer Applications, 31(1): 170-174. [in Chinese])
范承啸, 韩 俊, 熊志军, 等. 2009. 无人机遥感技术现状与应用. 测绘科学, 34(5): 214-215.
(Fan C X, Han J, Xiong Z J,etal. 2009. Application and status of unmanned aerial vehicle remote sensing technology. Science of Surveying and Mapping, 34(5): 214-215. [in Chinese])
何 诚, 张思玉, 姚树人. 2014. 旋翼无人机林火点定位技术研究. 测绘通报, (12): 24-27.
(He C, Zhang S Y, Yao S R. 2014. Forest fires locating technology based on rotor UAV. Bulletin of Surveying and Mapping, (12): 24-27.[in Chinese])
洪 宇, 龚建华, 胡社荣, 等. 2008. 无人机遥感影像获取及后续处理探讨. 遥感技术与应用, 23(4): 462-466.
(Hong Y, Gong J H, Hu S R,etal. 2008. Discussion on UAV remote sensing image capture and disposal. Remote Sensing Technology and Application, 23(4): 462-466. [in Chinese])
洪运富, 杨海军, 李 营, 等. 2015. 水源地污染源无人机遥感监测. 中国环境监测, 31(5): 163-166.
(Hong Y F, Yang H J, Li Y,etal. 2015. Monitoring of water source using unmanned aerial vehicle remote sensing technology. Environmental Monitoring in China, 31(5): 163-166. [in Chinese])
胡根生, 张学敏, 梁 栋, 等. 2013. 基于加权支持向量数据描述的遥感图像病害松树识别. 农业机械学报, 44(5): 258-263.
(Hu G S, Zhang X M, Liang D,etal. 2013. Infected pine recognition in remote sensing images based on weighted support vector data description. Transactions of the Chinese Society for Agricultural Machinery, 44(5): 258-263. [in Chinese])
胡根生, 张学敏, 梁 栋. 2014. 基于WWSVDD 多分类的遥感图像病害松树识别. 北京邮电大学学报, 37(2): 23-27.
(Hu G S, Zhang X M, Liang D. 2014. Infected pine recognition in remote sensing images using WWSVDD multi-classification. Journal of Beijing University of Posts and Telecommunications, 37(2): 23-27. [in Chinese])
贾建军, 舒 嵘, 王斌永. 2006. 无人机大面阵CCD相机遥感系统. 光电工程, 33(8): 90-93.
(Jia J J, Shu R, Wang B Y. 2006. Large frame CCD camera system for unmanned aircraft remote sensing.Opto-Electronic Engineering, 33(8): 90-93. [in Chinese])
金 伟, 葛宏立, 杜华强, 等. 2009. 无人机遥感发展与应用概况. 遥感信息, (1): 88-92.
(Jin W, Ge H L, Du H Q,etal. 2009. A review on unmanned aerial vehicle remote sensing and its application. Remote Sensing Information, (1): 88-92. [in Chinese])
李德仁, 李 明. 2014. 无人机遥感系统的研究进展与应用前景. 武汉大学学报:信息科学版, 39(5): 505-513, 540.
(Li D R, Li M. 2014. Research advance and application prospect of unmanned aerial vehicle remote sensing system. Geomatics and Information Science of Wuhan University, 39(5): 505-513, 540.[in Chinese])
李宇昊. 2007. 无人机在林业调查中的应用实验. 林业资源管理, (4): 69-73.
(Li Y H. 2007. Experiment on using unmanned aerial vehicle in forest investigation. Forest Resources Management, (4): 69-73.[in Chinese])
刘清旺, 李增元, 陈尔学, 等. 2010. 机载LIDAR点云数据估测单株木生物量. 高技术通讯, 20(7): 765-770.
(Liu Q W, Li Z Y, Chen E X,etal. 2010. Estimating biomass of individual trees using point cloud data of airborne LIDAR. Chinese High Technology Letters, 20(7): 765-770. [in Chinese])
刘清旺, 李增元, 陈尔学, 等. 2008. 利用机载激光雷达数据提取单株木树高和树冠. 北京林业大学学报, 30(6): 83-89.
(Liu Q W, Li Z Y, Chen E X,etal. 2008. Extracting individual tree heights and crowns using airborne LIDAR data. Journal of Beijing Forestry University, 30(6): 83-89. [in Chinese])
吕书强, 晏 磊, 张 兵, 等. 2007. 无人机遥感系统的集成与飞行试验研究. 测绘科学, 32(1): 84-86.
(Lü S Q, Yan L, Zhang B,etal. 2007. The integration and flight experiment of UAV remote sensing system. Science of Surveying and Mapping, 32(1): 84-86 [in Chinese])
马瑞升, 杨 斌, 张利辉, 等. 2012. 微型无人机林火监测系统的设计与实现. 浙江农林大学学报, 29(5): 783-789.
(Ma R S, Yang B, Zhang L H,etal. 2012. Design and implementation of a forest fire monitoring system using a miniature unmanned aerial vehicle. Journal of Zhejiang A&F University, 29(5): 783-789. [in Chinese])
秦 博, 王 蕾. 2002. 无人机发展综述. 飞航导弹, (8): 4-10.
(Qin B, Wang L. 2002. Review of the development of UAV. Aerodynamic Missile Journal, (8): 4-10.[in Chinese])
孙 杰, 林宗坚, 崔红霞. 2003. 无人机低空遥感监测系统. 遥感信息, (1): 49-50, 27.
(Sun J, Lin Z J, Cui H X. 2003. Alow-altitude UAV remote sensing monitoring system. Remote Sensing Information, (1): 49-50, 27. [in Chinese])
汪 沛, 罗锡文, 周志艳, 等. 2014. 基于微小型无人机的遥感信息获取关键技术综述. 农业工程学报, 30(18): 1-12.
(Wang P, Luo X W, Zhou Z Y,etal. 2014. Key technology for remote sensing information acquisition based on micro UAV. Transactions of the Chinese Society of Agricultural Engineering, 30(18): 1-12. [in Chinese])
王 峰, 吴云东. 2010. 无人机遥感平台技术研究与应用. 遥感信息, (2): 114-118.
(Wang F, Wu Y D. 2010. Research and application of UAS borne remote sensing. Remote Sensing Information, (2): 114-118.[in Chinese])
王利民, 刘 佳, 杨玲波, 等. 2013. 基于无人机影像的农情遥感监测应用. 农业工程学报, 29(18): 136-145.
(Wang L M, Liu J, Yang L B,etal. 2013. Applications of unmanned aerial vehicle images on agricultural remote sensing monitoring. Transactions of the Chinese Society of Agricultural Engineering, 29(18): 136-145. [in Chinese])
许子乾, 曹 林, 阮宏华, 等. 2015. 集成高分辨率UAV影像与激光雷达点云的亚热带森林林分特征反演. 植物生态学报, 39(7): 694-703.
(Xu Z Q, Cao L, Ruan H H,etal. 2015. Inversion of subtropical forest stand characteristics by integrating very high resolution imagery acquired from UAV and LiDAR point-cloud. Chinese Journal of Plant Ecology, 39(7): 694-703. [in Chinese])
杨 斌, 马瑞升, 何 立, 等. 2009. 基于颜色特征的遥感图像中烟的识别方法. 计算机工程, 35(7): 168-169.
(Yang B, Ma R S, He L,etal. 2009. Method of identifying fume in remote sensing images based on color features. Computer Engineering, 35(7): 168-169. [in Chinese])
杨海军, 李 营, 朱海涛, 等. 2015. 无人机遥感技术在环境保护领域的应用. 高技术通讯, 25(6): 607-613.
(Yang H J, Li Y, Zhu H T,etal. 2015. UAV remote sensing’s applications in the environmental protection field. High Technology Letters, 25(6): 607-613. [in Chinese])
张 波, 罗锡文, 兰玉彬, 等. 2015. 基于无线传感器网络的无人机农田信息监测系统. 农业工程学报, 31(17): 176-182.
(Zhang B, Luo X W, Lan Y B,etal. 2015. Agricultural environment monitor system based on UAV and wireless sensor networks. Transactions of the Chinese Society of Agricultural Engineering, 31(17): 176-182. [in Chinese])
张 增, 王 兵, 伍小洁, 等. 2015. 无人机森火灾监测中火情检测方法研究. 遥感信息, 30(1): 107-110, 124.
(Zhang Z, Wang B, Wu X J,etal. 2015. An algorithm of forest fire detection based on UAV remote sensing. Remote Sensing Information, 30(1): 107-110, 124. [in Chinese])
周洁萍, 龚建华, 王 涛, 等. 2008. 汶川地震灾区无人机遥感影像获取与可视化管理系统研究. 遥感学报, 12(6): 877-884.
(Zhou J P, Gong J H, Wang T,etal. 2008. Study on UAV remote sensing image acquiring and visualization management system for the area affected by 5·12 Wenchuan Earthquake. Journal of Remote Sensing, 12(6): 877-884. [in Chinese])
朱 锋, 肖 晖, 魏亚男. 2014. 无人机遥感影像镶嵌技术综述. 计算机工程与应用, 50(15): 38-41.
(Zhu F, Xiao H, Wei Y N. 2014. Summary of UAV remote sensing image mosaicking technology. Computer Engineering and Applications, 50(15): 38-41.[in Chinese])
Alexander C. 2009. Delineating tree crowns from airborne laser scanning point cloud data using Delaunay triangulation. International Journal of Remote Sensing, 30(14): 3843-3848.
Ambrosia V, Wegener S, Sullivan D,etal. 2003. Demonstrating UAV-aquired real-time thermal data over fires. Photogrametric Engineering and Remote Sensing, 69(4): 391-402.
Amon P, Riegl U, Rieger P,etal. 2015. UAV-based laser scanning to meet special challenges in lidar surveying. Geomatics Indaba Proceedings 2015, 138-147.
Axelsson P. 1999. Processing of laser scannerdata-algorithms and applications. ISPRS Journal of Photogrammetry and Remote Sensing, 54(2/3): 138-147.
Axelsson P. 2000. DEM generation from laser scanner data using adaptive TIN models. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XIX ISPRS Congress,XXXIII-B4, 110-117.
Bendig J, Bolten A, Bareth G. 2012. Introducing alow-cost mini-UAV for thermal and multispectral-imaging. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXII ISPRS Congress, XXXIX-B1, 345-349.
Berman E S F, Fladeland M, Liem J,etal. 2012. Greenhouse gas analyzer for measurements of carbon dioxide, methane, and water vapor aboard an unmanned aerial vehicle. Sensors and Actuators B: Chemical, 169: 128-135.
Brandtberg T, Warner T A, Landenberger R E,etal. 2003. Detection and analysis of individual leaf-off tree crowns in small footprint, high sampling density lidar data from the eastern deciduous forest in North America. Remote Sensing of Environment, 85(3): 290-303.
Brandtberg T. 2007. Classifying individual tree species underleaf-off and leaf-on conditions using airborne lidar. ISPRS Journal of Photogrammetry and Remote Sensing, 61(5): 325-340.
Breckenridge R P, Dakins M, Bunting S,etal. 2011. Comparison of unmanned aerial vehicle platforms for assessing vegetation cover in sagebrush steppe ecosystems. Rangeland Ecology & Management, 64(5): 521-532.
Breckenridge R P, Dakins M, Bunting S,etal. 2012. Using unmanned helicopters to assess vegetation cover in sagebrush steppe ecosystems. Rangeland Ecology & Management, 65(4): 362-370.
Choi K, Lee I, Hong J,etal. 2009. Developing aUAV-based rapid mapping system for emergency response. Proceedings of SPIE 7332, Unmanned Systems Technology XI, 733209.
Colomina I, Molina P. 2014. Unmanned aerial systems for photogrammetry and remote sensing: a review. ISPRS Journal of Photogrammetry and Remote Sensing, 92: 79-97.
Córcoles J I, Ortega J F, Hernández D,etal. 2013. Estimation of leaf area index in onion (AlliumcepaL.) using an unmanned aerial vehicle. Biosystems Engineering, 115(1): 31-42.
Dandois J P, Ellis E C. 2013. High spatial resolutionthree-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sensing of Environment, 136: 259-276.
Dandois J P, Ellis E C. 2010. Remote sensing of vegetation structure using computer vision. Remote Sensing, 2(4): 1157-1176.
Dandois J P, Olano M, Ellis E C. 2015. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sensing, 7(10): 13895-13920.
Díaz-Varela R A, Rosa R, León L,etal. 2015. High-resolution airborne UAV imagery to assess olive tree crown parameters using 3D photo reconstruction: application in breeding trials. Remote Sensing, 7(4): 4213-4232.
Ditmer M A, Vincent J B, Werden L K,etal. 2015. Bears show a physiological but limited behavioral response to unmanned aerial vehicles. Current Biology, 25 (17): 2278-2283.
Dunford R, Michel K, Gagnage M,etal. 2009. Potential and constraints of unmanned aerial vehicle technology for the characterization of mediterranean riparian forest. International Journal of Remote Sensing, 30(19): 4915-4935.
Essen H, Johannes W, Stanko S,etal. 2012. High resolution W-band UAV SAR. IEEE International Geoscience and Remote Sensing Symposium (IGARSS) 2012, 5033-5036.
Floreano D, Wood R J. 2015. Science, technology and the future of small autonomous drones. Nature, 521(7553): 460-466.
García-Gutiérrez J, Martínez-lvarez F, Troncoso A,etal. 2015. A comparison of machine learning regression techniques for LiDAR-derived estimation of forest variables. Neurocomputing, 167: 24-31.
Gehrke S, Downey M, Uebbing R,etal. 2012. A multi-sensor approach to semi-global matching. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXII ISPRS Congress, XXXIX-B3, 17-22.
Gehrke S, Uebbing R, Downey M,etal. 2011. Creating and using very high density point clouds derived from ADS imagery. Proceedings of the American Society of Photogrammetry and Remote Sensing 2011 Annual Conference.
Getzin S, Nuske R S, Wiegand K. 2014. Using unmanned aerial vehicles (UAV) to quantify spatial gap patterns in forests. Remote Sensing, 6(8): 6988-7004.
Ginzler C, Hobi M. 2015. Countrywidestereo-image matching for updating digital surface models in the framework of the Swiss national forest inventory. Remote Sensing, 7(4): 4343-4370.
Gleasona C J, Im J. 2012. Forest biomass estimation from airborne LiDAR data using machine learning approaches. Remote Sensing of Environment, 125: 80-91.
Glennie C, Brooks B, Ericksen T,etal. 2013. Compact multipurpose mobile laser scanning system — initial tests and results. Remote Sensing, 5(2): 521-538.
Goodwin N, Coops N, Culvenor D. 2006. Assessment of forest structure with airborne LiDAR and the effects of platform altitude. Remote Sensing Environment, 103 (2): 140-152.
Gottfried M, Hollaus M, Glira P,etal. 2015. First examples from the RIEGL VUX-SYS for forestry applications. In Proceedings of SilviLaser 2015, 105-107.
Grenzdörffer G, Niemeyer F, Schmidt F. 2012. Development of four vision camera system for amicro-UAV. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXII ISPRS Congress, XXXIX-B1, 369-374.
Gupta S, Weinacker H, Koch B. 2010. Comparative analysis ofclustering-based approaches for 3-D single tree detection using airborne fullwave LiDAR data. Remote Sensing, 2 (4): 968-989.
Hernández-Clemente R, Navarro-Cerrillo R M, Zarco-Tejad P J. 2012. Carotenoid content estimation in a heterogeneous conifer forest using narrow-band indices and PROSPECT + DART simulations. Remote Sensing of Environment, 127: 298-315.
Hirshmuller H. 2008. Stereo processing bysemi-global matching and mutual information. IEEE Transactions on Pattern Analysis and Machine Intelligence, 30(2): 328-341.
Holmgren J. 2004. Prediction of tree height, basal area and stem volume in forest stands using airborne laser scanning. Scandinavian Journal of Forest Research, 19(6): 543-553.
Hudak A T, Crookston N L, Evans J S,etal. 2008. Nearest neighbor imputation of species-level, plot-scale forest structure attributes from LiDAR data. Remote Sensing of Environment, 112(5): 2232-2245.
Hyyppa J, Hyyppa H, Leckie D,etal. 2008. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. International Journal of Remote Sensing, 29(5): 1339-1366.
Immerzeel W W, Kraaijenbrink P D A, Shea J M,etal. 2014. High-resolution monitoring of Himalayan glacier dynamics using unmanned aerial vehicles. Remote Sensing of Environment, 150: 93-103.
Jaakkola A, Hyyppä J, Kukko A,etal. 2010. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS Journal of Photogrammetry and Remote Sensing, 65(6): 514-522.
Kaartinen H, Hyyppä J, Yu X,etal. 2012. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sensing, 4 (4): 950-974.
Karma S, Zorba E, Pallis G C,etal. 2015. Use of unmanned vehicles in search and rescue operations in forest fires: advantages and limitations observed in a field trial. International Journal of Disaster Risk Reduction, 13: 307-312.
Kelcey J., Lucieer A. 2012. Sensor correction and radiometric calibration of a 6-band multispectral imaging sensor for UAV remote sensing. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXII ISPRS Congress,XXXIX-B1, 393-398.
Koch B, Heyder U, Weinacker H.2006. Detection of individual tree crowns in airborne Lidar data. Photogrammetric Engineering & Remote Sensing, 72(4): 357-363.
Lähivaara T, Seppänen A, Kaipio J P,etal. 2012. Bayesian approach to tree detection with airborne laser scanning. IEEE International Geoscience and Remote Sensing Symposium (IGRSS) 2012, 1641-1644.
Lehmann J R K, Nieberding F, Prinz T,etal. 2015. Analysis of unmanned aerial system-based CIR images in forestry—a new perspective to monitor pest infestation levels. Forests, 6(3): 594-612.
Li W, Guo Q. 2012. A new method for segmenting individual trees from the LiDAR point cloud. Photogrammetric Engineering & Remote Sensing, 78(1): 75-84.
Lin Y, Hyyppä J, Jaakkola A. 2011.Mini-UAV-borne LIDAR for fine-scale mapping. IEEE Geoscience and Remote Sensing Letters, 8(3): 426-430.
Lisein J,Pierrot-Deseilligny M, Bonnet S,etal. 2013. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests, 4(4): 922-944.
Liu C C, Chen Y H, Wen H L. 2015. Supporting the annual international black-faced spoonbill census with a low-cost unmanned aerial vehicle. Ecological Informatics, 30: 170-178.
Liu Q, Li Z, Chen E,etal. 2011. Feature analysis of LIDAR waveforms from forest canopies. Science China Earth Sciences, 54(8): 1206-1214.
Maltamo M, Eerikainen K, Pitkanen J,etal. 2004. Estimation of timber volume and stem density based on scanning laser altimetry and expected tree size distribution functions. Remote Sensing of Environment, 90(3): 319-330.
Martínez-de Dios J R, Merino L, Caballero F,etal. 2006. Experimental results of automatic fire detection and monitoring with UAVs. Proceedings of V International Conference on Forest Fire Research.
Masek J G, Hayes D J, Hughes M J,etal. 2015. The role of remote sensing in process-scaling studies of managed forest ecosystems. Forest Ecology and Management, 355: 109-123.
McElhinny C, Gibbons P, Brack C,etal. 2005. Forest and woodland stand structural complexity: its definition and measurement. Forest Ecology and Management, 218(1/3): 1-24.
Meng X, Currit N, Zhao K. 2010. Ground filtering algorithms for airborne LiDAR data: a review of critical issues. Remote Sensing, 2(3): 833-860.
Merino L, Caballero F, Martínez de Dios J R,etal. 2006. A cooperative perception system for multiple UAVs: application to automatic detection of forest fires. Journal of Field Robotics, 23 (3/4): 165-184.
Merino L, Caballero F, Martínez de Dios J R,etal. 2005. Cooperative fire detection using unmanned aerial vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, 1896-1901.
Merino L. 2010. Automatic forest fire monitoring and measurement using unmanned aerial vehicles. VI International Conference on Forest Fire Research.
Mesas-Carrascosa F J, Notario-García M D, de Larriva J E M,etal. 2014. Validation of measurements of land plot area using UAV imagery. International Journal of Applied Earth Observation and Geoinformation, 33: 270-279.
Morsdorf F, Meier E, Allgöwer B,etal. 2003. Clustering in airborne laser scanning raw data for segmentation of single trees. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 3-D reconstruction from airborne laserscanner and InSAR data, XXXIV-3/W13, 27-33.
Nagai M, Shibasaki R, Manandhar D,etal. 2004. Development of digital surface and feature extraction by integrating laser scanner and CCD sensor with IMU. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XX ISPRS Congress, XXXV-B5, 655-659.
Nagai M, Tianen C, Shibasaki R,etal. 2009. UAV-borne 3-D mapping system by multisensor integration. IEEE Transactions on Geoscience and Remote Sensing, 47 (3): 701-708.
Ni W, Liu J, Zhang Z,etal. 2015. Evaluation of UAV-based forest inventory system compared with LiDAR data. IEEE International Geoscience and Remote Sensing Symposium (IGARSS), 3874-3877.
Ollero A, Martínez-de-Dios J R, Merino L. 2006. Unmanned aerial vehicles as tools for forest-fire fighting. Proceedings of V International Conference on Forest Fire Research.
Ota T, Ogawa M, Shimizu K,etal. 2015. Aboveground biomass estimation using structure from motion approach with aerial photographs in a seasonal tropical forest. Forests, 6(11): 3882-3898.
Packalén P, Maltamo M. 2007. Thek-MSN method for the prediction of species-specific stand attributes using airborne laser scanning and aerial photographs. Remote Sensing of Environment, 109(3): 328-341.
Pajares G. 2015. Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVs). Photogrammetric Engineering & Remote Sensing, 81 (4): 281-329.
Penner M, Woods M, Pitt D A. 2015. Comparison of airborne laser scanning and image point cloud derived tree size class distribution models in Boreal Ontario. Forests, 6(11): 4034-4054.
Popescu S C. 2007. Estimating biomass of individual pine trees using airborne lidar. Biomass and Bioenergy, 31(9): 646-655.
Rehak M, Mabillard R, Skaloud J. 2013. Amicro-UAV with the capability of direct georeferencing. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, UAV-g 2013, XL-1/W2, 317-323.
Reitberger J, Schnörr C, Krzystek P,etal. 2009. 3D segmentation of single trees exploiting full waveform LIDAR data. ISPRS Journal of Photogrammetry and Remote Sensing, 64(6): 561-574.
Rejas J I, Sanchez A, Glez-de-Riveraa G,etal. 2015. Environment mapping using a 3D laser scanner for unmanned ground vehicles. Microprocessors and Microsystems, 39 (8): 939-949.
Remy M A, de Macedo K A C, Moreira J R. 2012. The FirstUAV-based P- and X-band Interferometric SAR System. IEEE International Geoscience and Remote Sensing Symposium (IGARSS), 5041-5044.
Rufino G, Moccia A. 2005. IntegratedVIS-NIR Hyperspectral/thermal-IR Electrooptical Payload System for a Mini-UAV. American Institute of Aeronautics and Astronautics, 647-664.
Scherer S, Singh S, Chamberlain L,etal. 2008. Flying fast and low among obstacles: methodology and experiments. International Journal of Robotics Research, 27(5): 549-574.
Scholtz A, Kaschwich C, Kruger A,etal. 2011. Development of a new multi-purpose UAS for scientific application. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, International Conference on Unmanned Aerial Vehicle in Geomatics (UAV-g), XXXVIII-1/C22, 149-154.
Shahbazi M, Sohn G, Théau J,etal. 2015. Development and evaluation of a UAV-photogrammetry system for precise 3D environmental modeling. Sensors, 15(11): 27493-27524.
Snavely N, Seitz S M, Szeliski R. 2008. Modeling the world from Internet photo collections. International Journal of Computer Vision, 80(2): 189-210.
St-Onge B, Audet F-A, Bégin J. 2015. Characterizing the height structure and composition of a boreal forest using an individual tree crown approach applied to photogrammetric point clouds. Forests, 6(11): 3899-3922.
St-Onge B, Vega C, Fournier R A,etal. 2008. Mapping canopy height using a combination of digital stereo-photogrammetry and lidar. International Journal of Remote Sensing, 29(11): 3343-3364.
Tulldahl H M, Bissmarck F, Larsson H,etal. 2015. Accuracy evaluation of 3D lidar data from small UAV. Proceedings of SPIE 9649, Electro-Optical Remote Sensing, Photonic Technologies, and Applications IX, 964903.
Tulldahl H. M, Larsson H. 2014. Lidar on small UAV for 3D mapping. Proceedings of SPIE 9250,Electro-Optical Remote Sensing, Photonic Technologies, and Applications VIII, and Military Applications in Hyperspectral Imaging and High Spatial Resolution Sensing II, 925009.
Turner D, Lucieer A, Watson C. 2012. An automated technique for generating georectified mosaics fromultra-high resolution unmanned aerial vehicle (UAV) imagery, based on structure from motion (SfM) point clouds. Remote Sensing, 4(5): 1392-1410.
Turner D, Lucieer A, Wallace L. 2014. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Transactions on Geoscience and Remote Sensing, 52(5): 2738-2745.
Vaughn N R, Moskal L M, Turnblom E C. 2012. Tree species detection accuracies using discrete point LiDAR and airborne waveform LiDAR. Remote Sensing,4(2): 377-403.
Vauhkonen J, Ene L, Gupta S,etal. 2011. Comparative testing of single-tree detection algorithms under different types of forest. Forestry, 85(1): 27-40.
Wallace L, Lucieer A, Malenovsk Z,etal. 2016. Assessment of forest structure using two UAV techniques: a comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests, 7(3): 62.
Wallace L, Lucieer A, Watson C,etal. 2012. Development of a UAV-LiDAR system with application to forest inventory. Remote Sensing, 4(6): 1519-1543.
Wallace L, Lucieer A, Watson C S. 2014a. Evaluating tree detection and segmentation routines on very high resolution UAV LiDAR data. IEEE Transactions on Geoscience and Remote Sensing, 52(12): 7619-7628.
Wallace L, Musk R, Lucieer A. 2014b. An assessment of the repeatability of automatic forest inventory metrics derived fromUAV-borne laser scanning data. IEEE Transactions on Geoscience and Remote Sensing, 52(11): 7160-7169.
Wallace L, Watson C, Lucieer A. 2014c. Detecting pruning of individual stems using airborne laser scanning data captured from an Unmanned Aerial Vehicle. International Journal of Applied Earth Observation and Geoinformation, 30: 76-85.
Wang Y, Weinacker H, Koch B,etal. 2008. Lidar point cloud based fully automatic 3D single tree modelling in forest and evaluations of the procedure. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXI ISPRS Congress, XXXVII, 45-51.
Waser L T, Fischer C, Wang Z,etal. 2015. Wall-to-wall forest mapping based on digital surface models from image-based point clouds and a NFI forest definition. Forests, 6(12): 4510-4528.
Watts A C, Ambrosia V G, Hinkley E A. 2012. Unmanned aircraft systems in remote sensing and scientific research: classification and considerations of use. Remote Sensing, 4(6): 1671-1692.
White J C, Wulder M A, Vastaranta M,etal. 2013. The utility of image-based point clouds for forest inventory: a comparison with airborne laser scanning. Forests, 4(3): 518-536.
White J, Stepper C, Tompalski P,etal. 2015. Comparing ALS and image-based point cloud metrics and modelled forest inventory attributes in a complex coastal forest environment. Forests, 6(10): 3704-3732.
Xiang H., Tian L. 2011. Development of alow-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosystems Engineering, 108(2): 174-190.
Yang B, Chen C. 2015. Automatic registration ofUAV-borne sequent images and LiDAR data. ISPRS Journal of Photogrammetry and Remote Sensing, 101: 262-274.
Yu X, Hyyppä J, Vastaranta M,etal. 2011. Predicting individual tree attributes from airborne laser point clouds based on the random forests technique. ISPRS Journal of Photogrammetry and Remote Sensing, 66(1): 28-37.
Zahawi R A, Dandois J P, Holl K D,etal. 2015. Using lightweight unmanned aerial vehicles to monitor tropical forest recovery. Biological Conservation, 186: 287-295.
Zarco-Tejada P J, Guillén-Climent M L, Hernández-Clemente R,etal. 2013. Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agricultural and Forest Meteorology, 171- 172: 281- 294.
Zarco-Tejada P J, Diaz-Varela R, Angileri V,etal. 2014. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. European Journal of Agronomy, 55: 89-99.
Zhang C, Kovacs J M. 2012. The application of small unmanned aerial systems for precision agriculture: A review. Precision Agriculture, 13: 693-712.
Zhang J, Hu J, Lian J,etal. 2016. Seeing the forest from drones: Testing the potential of lightweight drones as a tool for long-term forest monitoring. Biological Conservation, 198: 60-69.
Zhao K, Popescu S, Meng X,etal. 2011. Characterizing forest canopy structure with lidar composite metrics and machine learning. Remote Sensing of Environment, 115(8): 1978-1996.
Zhou G, Yang J, Li X,etal. 2012. Advances of flash LiDAR development onboard UAV. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXII ISPRS Congress, XXXIX-B3, 193-198.
(责任编辑 石红青)
Review on the Applications of UAV-Based LiDAR and Photogrammetry in Forestry
Liu Qingwang1Li Shiming1Li Zengyuan1Fu Liyong1Hu Kailong1, 2
(1.ResearchInstituteofForestResourceInformationTechniques,CAFBeijing100091; 2.CollegeofGeo-ScienceandSurveyingEngineering,ChinaUniversityofMining&TechnologyBeijing100083)
Forest spatial structure and dynamics pattern are crucial to forest management and ecological modelling. Unmanned aerial vehicle (UAV) based light detecting and ranging (LiDAR) and photogrammetry could provide comprehensive spatial structure and species of forest, and have unrivalled advantages in the long-time monitoring of forest environment at individual tree or stand scale. UAV-based LiDAR system usually carries multiple echoes / full wave laser scanner, and assembles high precision global navigation satellite system (GNSS) & inertial measurement unit (IMU) which is used to ensure the position accuracy of backscatter signals of transmitted laser pulses. UAV-based photogrammetry system mainly carries visual (RGB) / multiband camera, and assembles low precision GNSS & IMU. Automated 3D reconstruction algorithms can estimate the locations and orientations of cameras and camera internal parameters using highly overlapping aerial photographs, and generate initial rectified images and point cloud with relative coordinates, which can be georeferenced by ground control points (GCPs), reference images, etc. The accuracy of image matching can be improved using high precision GNSS, stabilized platform, etc. Individual tree segmentation algorithms were generally used to extract structure information of individual trees, such as tree tops, crown edges, locations of trees, etc., from point cloud of LiDAR or photogrammetry reconstruction. The structure features of individual trees can also be recognized from projected voxel space or canopy height model (CHM) generated from point cloud. Forest stand structure information were usually estimated by height profile algorithms from point cloud or synthetic waveform. The point cloud can be directly used to calculate features, such as height percentile, echo index, etc., or generate synthetic waveforms based frequency or intensity of echoes at specified bin of height. The waveform features, such as percentile, leading edge, trailing edge, etc., can be extracted from synthetic waveforms. The estimation values of forest structure parameters were obtained based on the relationship between field measurements and the features of point cloud or waveforms. The terrain under forest canopy can be detected from point cloud of LiDAR or photogrammetry reconstruction. The accuracy of terrain from photogrammetry reconstruction was similar to that from LiDAR in low canopy closure area, but lower than that from LiDAR in high canopy closure area. Multitemporal measurements of UAV-based LiDAR and photogrammetry can be used to monitor forest structure change caused by manual pruning, selective cutting, forest fire, disease and pest damage, etc., and phenological change, such as brunches and leaves growing, leaves falling, etc. The estimation accuracy of forest structure parameters extracted using UAV-based LiDAR and photogrammetry were affected by acquisition patterns, data processing algorithms, forest growing season, terrain, etc. The art of state repertoire hasn’t been suitable to wide utilization in forestry. The UAV flying should follow the constrains of national / local laws and regulations, which has been managed according to some conditions, such as empty weight, max take-off weight, etc., in China. In the future, UAV data acquisition and processing system will be more intelligent, miniaturized, low-cost, and better serve the needs of forestry applications.
unmanned aerial vehicle(UAV); light detection and ranging(LiDAR); photogrammetry; point cloud; forest
10.11707/j.1001-7488.20170714
2016-04-13;
2016-07-06。
中国林业科学研究院中央级公益性科研院所基本科研业务费专项资金项目(CAFYBB2016SZ003); 国家重点基础研究发展计划(973计划)课题(2013CB733405, 2013CB733404)。
S757
A
1001-7488(2017)07-0134-15
* 李世明为通讯作者。
猜你喜欢
江苏安全生产(2022年11期)2023-01-11
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
山西林业(2021年2期)2021-07-21
软件(2020年3期)2020-04-20
中国新闻周刊(2020年6期)2020-03-08
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
腹腔镜外科杂志(2016年12期)2016-06-01
转化医学电子杂志(2015年4期)2015-12-27