基于场路耦合的轮毂式开关磁阻电机的电磁性能分析
2017-08-31 19:02胡艳芳吴路明
电工技术学报 2017年15期
胡艳芳 丁 文 吴路明
(西安交通大学电气工程学院 西安 710049)
基于场路耦合的轮毂式开关磁阻电机的电磁性能分析
胡艳芳 丁 文 吴路明
(西安交通大学电气工程学院 西安 710049)
首先采用有限元法对一台三相18/24极轮毂式开关磁阻电机(SRM)进行了静磁场分析,获得了电机的L-i-θ曲线、T-i-θ曲线、磁化特性曲线以及不同转子位置下的磁力线和磁通密度分布;接着,在现有文献的基础上充分考虑SRM的饱和非线性,采用基于Simplorer与Maxwell场路耦合的联合仿真方法对电机进行了瞬态场计算,得到了不同运行条件下的电流、电磁转矩等波形;最后,通过加工样机测量了电机在起动、稳态运行、加速、减速和变负载等状态下的实验波形,其结果与仿真波形吻合较好,验证了分析方法和结果的有效性。
开关磁阻电机 轮毂电机 电动自行车 场路耦合 Simplorer
0 引言
电机作为电动自行车的主要动力来源,对其性能具有重要影响。同时,考虑到生活实际中的诸多问题,要求用于电动自行车的电机应具有可靠性、变速和成本等方面的优势[1-3]。
目前,永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)和无刷直流电机(Brushless DC Motor,BLDCM)以其高效率和高功率密度等优势普遍应用于电动自行车中,但由于永磁体的存在,使得这两种电机存在磁场调节困难、恒功率范围窄、永磁材料成本较高等问题[3-6]。而开关磁阻电机(Switched Reluctance Motor,SRM)由于相间电磁耦合较弱,转子既无永磁体又无绕组,使得其结构较笼型异步电机更为简单坚固、成本低廉、可靠性高,同时具有起动性能好、调速范围宽、适合频繁起停等优点,因此被认为是电动自行车驱动电机的最佳选择之一[1,7]。
近年来,国内外学者对于电动自行车用开关磁阻电机的研究主要集中在电机的结构设计、分析与优化以及控制系统的设计等方面。文献[8]设计了一台用于电动自行车的500 W、500 r/min的三相6/10极外转子开关磁阻电机,在利用有限元软件JMAG对电机进行静态特性分析的基础上,通过权衡输出转矩、转矩脉动、效率和重量等因素对电机的极弧进行了优化,并通过比较磁链和电流的有限元结果和实验结果对所设计电机的性能进行了初步分析。文献[9]在分析相数和定、转子极数对电机性能影响的基础上,设计了一台12/16极结构的外转子SRM,并基于静态有限元模型对SRM的定、转子铁心尺寸进行了优化和绕组方案选择,最后通过对实验样机的测试初步验证了方案的合理性。文献[10]在对三相24/16极和四相24/18极两种SRM结构进行比较分析的基础上,采用四相结构方案设计一台400 W、550 r/min的外转子电机,并测试了驱动系统的空载和负载性能,获得了平稳的调速特性。文献[11]应用Ansoft有限元仿真软件对18/24极和36/24极两种三相SRM在额定工作点的效率、起动转矩、效率曲线和过载能力等性能指标进行了对比,并通过实验验证了方案的可行性。文献[12] 介绍了一种用于电动自行车的6/8极结构外转子SRM的设计过程。该文首先采用PC-SRD程序结合Matlab/Simulink对电机结构参数进行了优化,然后根据选择的几何尺寸在有限元分析软件Flux2D中建立电机的模型,通过对转矩电流比、转矩-转速和电流/功率-转速曲线的分析来评估电机的性能,为特殊电机的设计和分析提供了有效途径。在驱动系统方面,文献[13,14]分别设计了基于单片机和DSC的电动自行车用SRM控制系统的软、硬件,并对驱动系统进行了实验,结果均验证了系统良好的调速性能。文献[15]选择了一台四相24/18极结构的SRM作为电动自行车的驱动电机,为了节约系统成本和体积,采用无中点电容的裂相式主电路作为功率变换器的拓扑,对不同中点电容的中点电压、电流和效率进行了建模分析和比较,得出采用该拓扑的SRM系统能够在额定转速时取得73%的效率,达到了电动自行车的调速要求。
尽管SRM优势明显,但强烈的饱和非线性使得对其准确建模和分析较困难。本文旨在现有研究的基础上,采用基于Simplorer与Maxwell的场路耦合方法对一台三相18/24极电动自行车用SRM进行电磁性能分析,以尽可能模拟电机的实际运行状态。场路耦合法是求解驱动电路和电机模型耦合问题的一种方法,现有文献鲜有采用该方法对轮毂式SRM驱动系统进行性能分析。在进行场路耦合联合仿真时,Simplorer与Maxwell同时运行,以Simplorer为主控模块,Maxwell为从属模块;在给定的时间步长内,由Simplorer将绕组电流和转子角度信息传递给Maxwell,而Maxwell将绕组反电动势和电机转矩传递给Simplorer。因此,场路耦合仿真具有较高的计算精度,并能处理复杂的多物理域问题。
1 开关磁阻电机的电磁场计算
1.1 等效电路模型
SRM的运行遵循“磁阻最小原理”,其各相磁链、电感和转矩等参数不仅是电流的函数,而且与转子位置相关。参考文献[16],忽略互感影响,SRM的电压平衡方程式为
(1)
式中,Uk为相绕组电压;Rk为相绕组电阻;ik为相绕组电流;ψk为相绕组磁链;θ为转子位置角。
进一步,每相磁链可表示为
ψk=Lk(θ,i)ik
(2)
将式(2)代入式(1)中,并假定电机以角速度ωm匀速运行,则式(1)可整理为
(3)
式中,等式右侧各项依次为线路电阻压降、感应电动势和运动电动势。
根据式(3)可以得出如图1所示的SRM一相绕组的等效电路。图1中,ek为运动电动势,相当于式(3)中等号右侧的第三项。
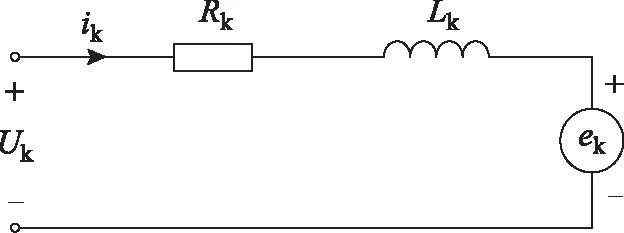
图1 SRM一相绕组等效电路Fig.1 Equivalent circuit of SRM in one phase winding
根据上述电压平衡方程,可以推导出任一工作点的瞬时电磁转矩表达式为
(4)
由于电感和电流受磁场的饱和效应影响,具有强烈的非线性特性,通常难以用解析式表达,因此需要借助数值分析方法获得。
1.2 磁场计算
磁场强度H和磁感应强度B是进行SRM磁场分析的基本参量。在有限元分析中,引入矢量磁位A求解磁场强度和磁感应强度等物理量,进而可得到磁场能量和磁场力等其他参数。
静磁场求解中,在库仑规范下,矢量磁位A满足微分方程
(5)
式中,J为电流流动截面的电流密度。在有电流分布的区域,J≠0;在无电流分布的区域,J=0。
在求得矢量磁位A后,根据式(6)、式(7)可得到磁感应强度B和磁场强度H分别为

(6)
(7)
瞬态磁场中,有限元模型中各点的矢量磁位A可通过运动方程(8)求得。
(8)
式中,Js为源电流密度;σ为导体电导率;v为运动物体的速度;Hc为铁磁材料的矫顽力。
2 轮毂式开关磁阻电机有限元仿真
参考现有电动自行车用电机的主要参数以及开关磁阻电机的设计原则,本文利用通用有限元分析软件设计了一台PN=350 W、nN=400 r/min的三相轮毂式开关磁阻电机,其主要电气参数和结构参数列于表1。其中,定、转子极数分别为18和24,每相绕组包含6个线圈。图2分别为轮毂式SRM的Maxwell3D模型和定子一相绕组连接图。
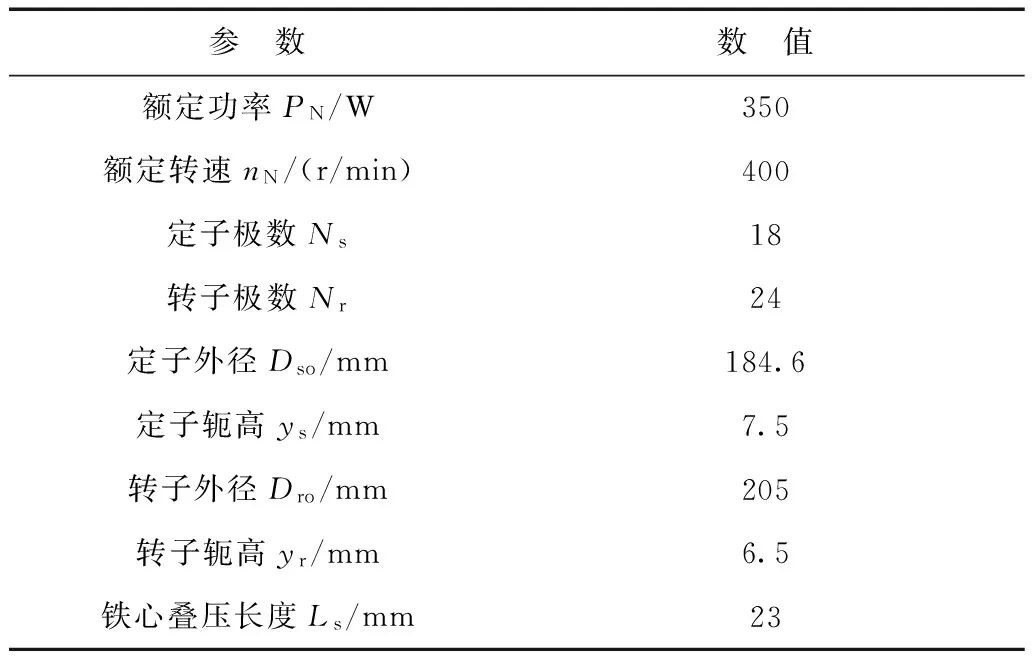
表1 轮毂式SRM主要参数Tab.1 The main parameters of in-wheel SRM

图2 电机模型及绕组连接Fig.2 The model and winding connection
2.1 静态电磁特性分析
SRM的磁场具有典型的饱和非线性特性,各相电感和转矩是绕组电流i和转子位置θ的函数。静态电磁仿真的目的是通过计算电感/转矩-电流-转子位置特性曲线来预测电机的运行性能,并为电机的结构优化和控制奠定基础。
图3分别为一个转子极距内绕组电流从0 A增加到40 A时的电感特性曲线L(i,θ)、转矩特性曲线T(i,θ)和磁化特性曲线。
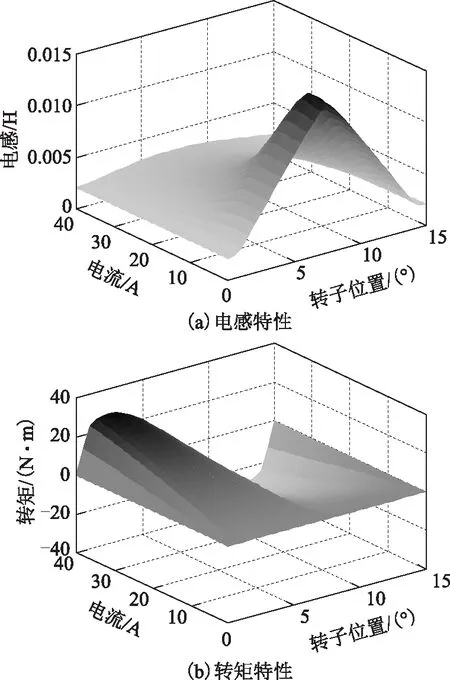
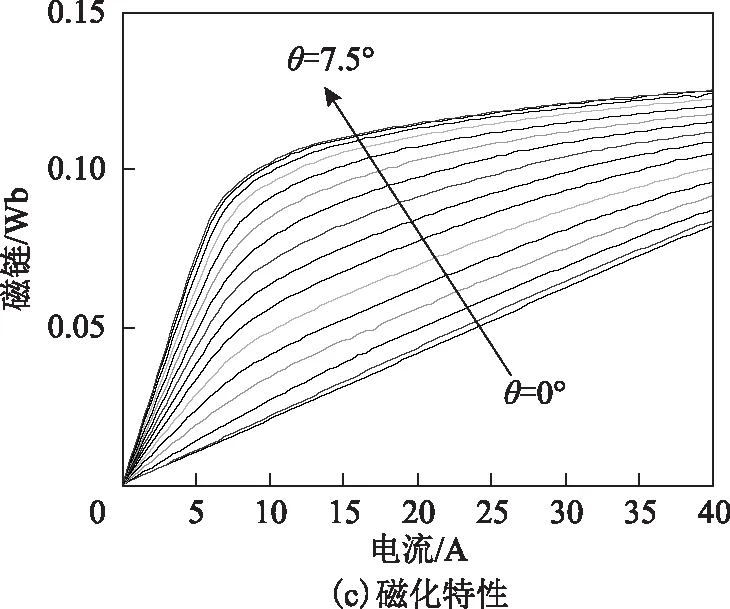
图3 18/24极轮毂式SRM的相电感、转矩和磁化特性Fig.3 Phase inductance,torque and magnetization characteristics of 18/24 poles in-wheel SRM
从图3a中可以看出,在相同电流值下,电机自磁阻最大位置(θ=0°)向磁阻最小位置(θ=7.5°)运动时,由于磁阻减小,铁心中磁通量增加,使得电感值也逐渐增大;而相同位置时磁通的增加速率小于电流的增长速率,使得电感值随电流的增加而减小。根据式(4),转矩与电流的二次方和电感的变化率正相关,因此,在电感曲线上升阶段,电流增加,转矩正向增大,在θ=2.5°前后达到最大值,电机处于电动状态;在电感曲线下降阶段,电流增加,转矩反向增大,在θ=10°前后达到最大值,电机处于发电状态。从图3c中可以看出,在磁阻最大位置(θ=0°)磁动势主要降落在气隙段,磁化曲线呈线性增长;当转子运动到接近磁阻最小位置(θ=7.5°)时,随着铁心中的磁阻在磁路中总磁阻的比例增加,电机逐渐趋于饱和,当I>15 A时,磁链不再随电流上升而明显增加。
图4分别为绕组电流为15 A时,电机在一相绕组的磁阻最大位置时的磁力线和磁通密度分布以及磁阻最小位置时的磁力线和磁通密度分布。从图中可以看出,磁通路径为短磁路,在磁阻最大位置和磁阻最小位置时电机铁心的最大磁通密度分别约为1 T和1.8 T,在合理范围内。


图4 18/24极轮毂式SRM在两个典型位置的磁力线和磁通密度分布情况Fig.4 The flux linkage and magnetic flux dense distribution at two typical positions of 18/24 poles in-wheel SRM
2.2 基于Simplorer与Maxwell的瞬态磁场仿真
在Simplorer中搭建如图5所示的基于不对称功率变换电路的联合仿真系统模型,分别对电机进行起动、稳态及调速运行的仿真。
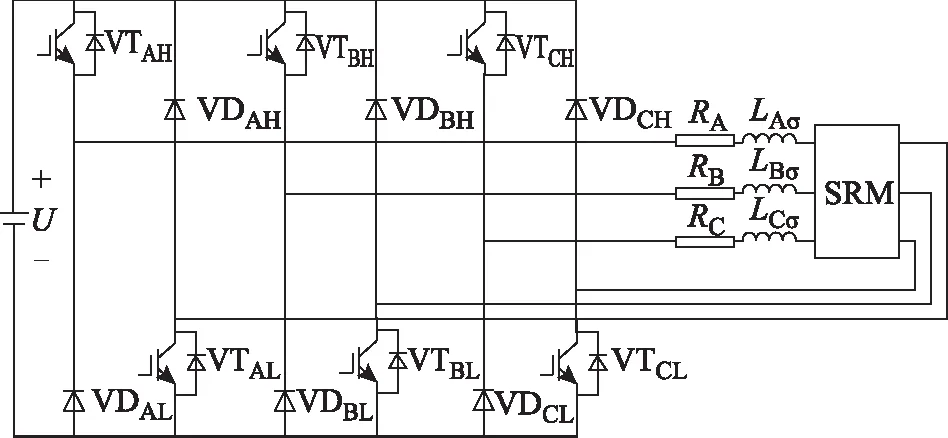
图5 基于Simplorer与Maxwell的18/24极轮毂式SRM场路耦合联合仿真系统示意图Fig.5 The system diagram of field-circuit coupling co-simulation based on Simplorer and Maxwell for 18/24 poles in-wheel SRM
首先对额定电压下的起动过程进行仿真。假设初始时刻转子位于某相绕组的磁阻最大位置,额定电压下带额定负载运行时的转速和电流波形如图6所示。从图中可以看出,初始起动阶段电流和电磁转矩迅速上升,转速也逐步升高,并最终稳定在400 r/min附近,同时电磁转矩和三相电流幅值也趋于稳定,此时起动过程完成,电机进入稳态运行。但由于SRM磁阻性质的转矩使得其转矩脉动明显,从而造成转速和电流波形有一定程度的波动。
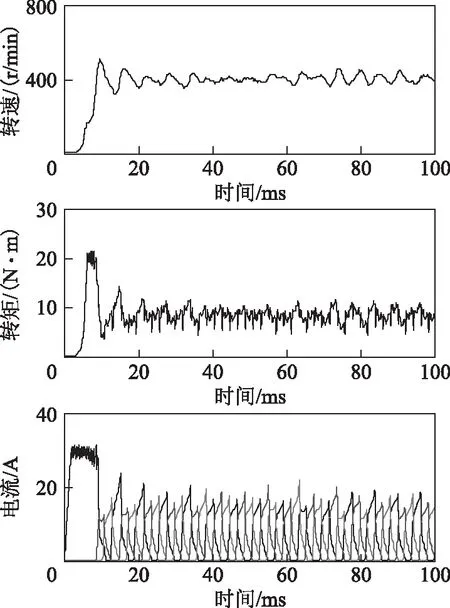
图6 电机起动仿真结果Fig.6 Results of starting-up simulation
图7为额定电压和额定转速下,开关角度为-1°~5° 时的稳态转矩和电流波形的放大图。经计算,平均输出转矩Tav=9.48 N·m,相电流有效值约为 9.85 A,转矩脉动率约为96.85%。可见,在该运行状态下,输出转矩能够达到运行要求。


图7 稳态运行时的转矩和电流波形Fig.7 The steady-state torque and current waveforms
改变转速以模拟系统变速运行时的状态。图8为额定电压下,电机分别在40 ms和80 ms时由200 r/min连续升高100 r/min时的稳态转矩和电流波形。结果表明,随着转速的升高,电机的输出转矩和电流也相应减少。因此,在电机低速运行时,为避免电流过大损坏电机或系统,通常需要对电流加以限制。
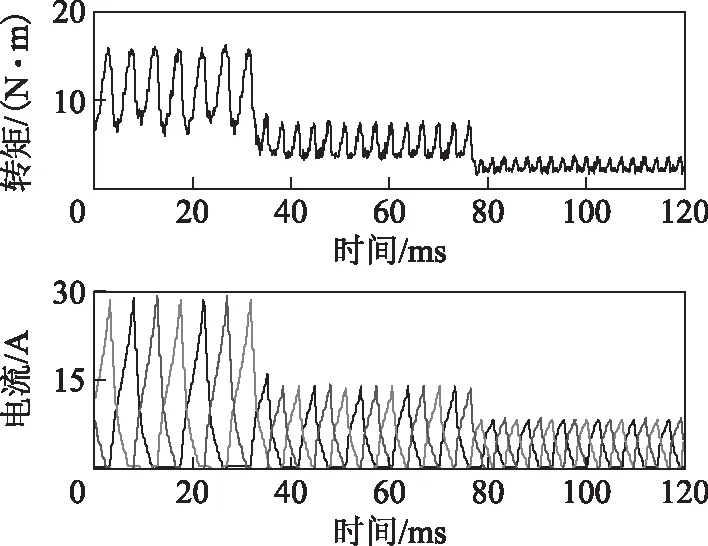
图8 不同转速下的稳态转矩和电流波形Fig.8 The steady-state torque and current waveforms at variable speed
在控制电路中加入电流斩波单元,测试系统在电流斩波控制(Current Chopping Control,CCC)下的稳态转矩和电流波形如图9所示。从图中可看出,电流限幅为10 A时的电机平均输出转矩约为4.8 N·m,转矩脉动率约为88.77%,较开环稳态运行时两者均有所降低。

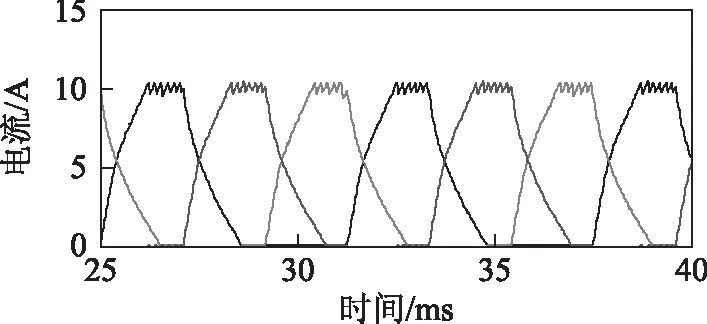
图9 电流斩波控制下的稳态转矩和电流波形Fig.9 The steady-state torque and current waveforms under current chopping control
注意到,虽然采用CCC后电机的转矩脉动有所减小,但依然较电磁式电机大。这是因为电流斩波控制是通过将电流幅值限制在一定范围内来控制输出转矩的,但在电感开始上升和定、转子磁极中心线重合位置前后,电流幅值偏小,导致电机各相在开始导通和续流阶段转矩输出也较小,因而虽然这种方法能够在一定程度上减小导通相的转矩脉动,但换相过程中的转矩脉动不能得到很好地抑制,需要引入转矩反馈并采用更为有效的转矩控制策略来实现,这些将在以后的工作中讨论。
3 实验测试驱动系统实验
3.1 系统硬件平台
图10分别为18/24极外转子开关磁阻电机的实验样机和基于STM32F103控制器的驱动系统示意图。

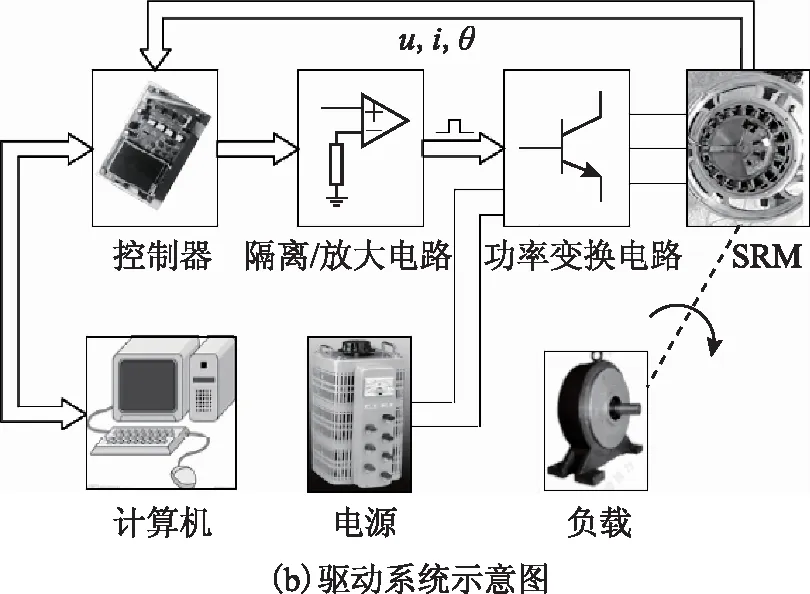
图10 18/24极轮毂式SRM原理样机及系统示意图Fig.10 The prototype and system diagram of 18/24 poles in-wheel SRM
3.2 实验结果及分析
在系统实验平台上分别对电机进行起动、稳态运行、调速和变负载运行性能的测试。
3.2.1 起动和稳态运行实验
设置参考转速为400 r/min,开关角度为0°~5°,带负载闭环起动时的转速和电流波形如图11a、图11b所示。从图中可以观察到,电机转速快速上升,经过1 s左右稳定在400 r/min附近,此时三相电流也达到稳定状态。图11c示出了该状态下稳态相电流的测量值和仿真值的对比情况。通过比较结果可以看出,仿真电流的幅值和波形均与实验结果吻合较好,验证了联合仿真模型和结果的准确性。
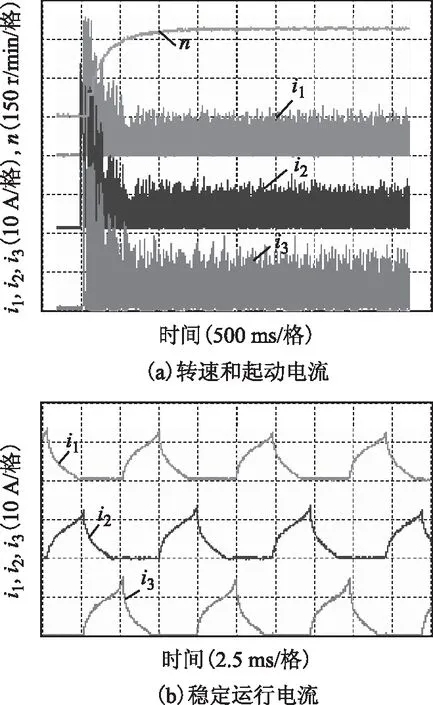

图11 起动实验结果Fig.11 Results of starting-up experiment
图12为电机带60%额定负载闭环运行于300 r/min时,各相电流测量结果与仿真结果的对比。从图中可以看出仿真结果与实验波形基本一致。
3.2.2 变速运行
图13分别为电机带80%额定负载条件下的加速和减速实验波形。其中,图13a为从200 r/min先加速到300 r/min并维持一段时间后又继续加速到400 r/min 时的转速和电流波形;图13b为从400 r/min先减速到300 r/min并维持一段时间后又继续减速到200 r/min时的转速和电流波形。
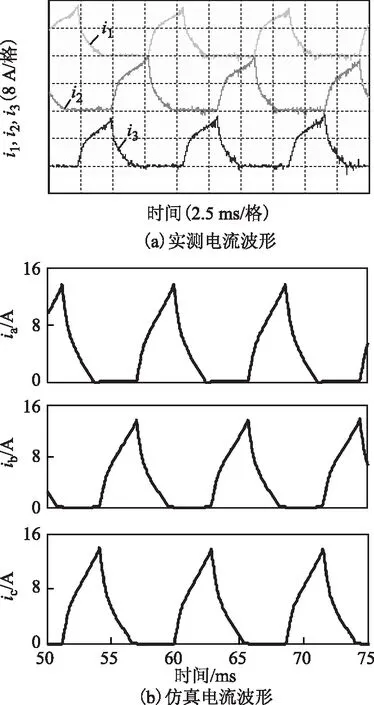
图12 转速闭环控制时实测电流与仿真电流对比Fig.12 Comparison of measured current and simulated current under the speed-closed loop control

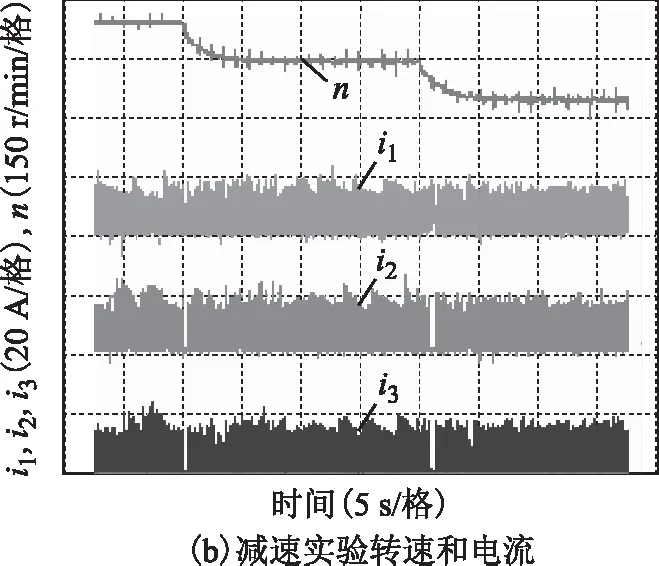
图13 变速实验结果Fig.13 The results of variable-speed experiments
从实验结果可以看出:电机在不同转速下均运行平稳;变速过程中转速响应较快、过渡时间较短;同时,由于运行过程中负载转矩保持不变,使得电机各相电流幅值也没有明显变化。
3.2.3 变负载运行
在转速闭环控制方式下设定参考转速为 400 r/min,改变电机负载时的实验结果如图14所示。其中,图14a为某一时刻由40%额定负载增加一倍时的转速和三相电流波形;图14b为相反过程,即在某一时刻由80%额定负载减少一半时的转速和三相电流波形。

图14 变负载实验结果Fig.14 The results of load adjustment experiments
从图14中可以观察到:当突增负载时,电机各相电流迅速增加,但由于机械惯性的作用,电机转速出现略微降低,之后随着电流和电磁转矩的增加又恢复到给定转速;当突减负载时,各相电流迅速减小,同样由于机械惯性的作用,电机转速略微升高后又恢复到给定转速。
4 结论
本文首先通过静磁场有限元计算,分析了一台三相18/24极电动自行车用轮毂式SRM的电感特性曲线L(i,θ)、转矩特性曲线T(i,θ)和磁化特性。建立了基于Simplorer与Maxwell场路耦合的联合仿真模型,对电机的瞬态运行特性进行了仿真,通过计算电机的起动、稳态、变速以及CCC下的电机电流、转矩等参量,分析了电机在上述不同运行状态下的性能。最后,通过加工原理样机并搭建硬件实验平台测量了起动、稳态、变速和变负载运行下的电机转速和电流波形,其结果与仿真结果基本一致,验证了仿真模型和结果的有效性。
[1] 郑萍,崔淑梅,宋立伟,等.电动车用电机的发展趋势[J].微电机,1997,30(3):18-21.ZhengPing,CuiShumei,SongLiwei,etal.Developingtendencyofmotorinelectricallyoperatedvehicle[J].Micromotor,1997,30(3):18-21.
[2]TrifaV,CistelecanM,MargineanC.Directelectricin-wheeldrivingofabicycleusingreluctantmotors[C]//InternationalAegeanConferenceonElectricalMachinesandPowerElectronics(ACEMP′07),2007:17-20.
[3] 褚文强,辜承林.电动车用轮毂电机研究现状与发展趋势[J].电机与控制应用,2007,34(4):1-5.ChuWenqiang,GuChenglin.Applicationstatusanddevelopingtendofin-wheelmotorsusedforelectricautomobile[J].ElectricMachinesandControlApplication,2007,34(4):1-5.
[4] 游琳娟,吴汉光,雷德森.电动车电机及其控制技术的发展[J].中小型电机,2001,28(1):35-38.YouLinjuan,WuHanguang,LeiDesen.Developmentofelectricalvehiclemotorandcontroltechnology[J].S&MElectricMachines,2001,28(1):35-38.
[5]StarschichE,MuetzeA.Comparisonoftheperformanceofdifferentgearedbrushless-DCmotordrivesforelectricbicycles[C]//IEEEInternationalElectricMachines&DrivesConference,Antalya,Turkey,2007:140-147.
[6]ChleboszW,OmbachG,JunakJ.Comparisonofpermanentmagnetbrushlessmotorwithouterandinnerrotorusedine-bike[C]//2010XIXInternationalConferenceonElectricalMachines,Rome,Italy,2010:1-5.
[7] 杨朝辉,杜晓平.车用电动机的发展现状及趋势[J].汽车实用技术,2015(9):163-164.YangZhaohui,DuXiaoping.Thecurrentanddevelopmentstatusofmotorforvehicle[J].AutomobileAppliedTechnology,2015(9):163-164.
[8]LinJianing,SchofieldN,EmadiA.External-rotor6-10switchedreluctancemotorforanelectricbicycle[J].IEEETransactionsonTransportationElectrification,2015,1(4):348-356.
[9] 花为,华浩,赵桂书,等.一种用于电动自行车的高性能开关磁阻电机系统[J].南京航空航天大学学报,2014,46(1):37-43.HuaWei,HuaHao,ZhaoGuishu,etal.High-performanceswitchedreluctancemachineforelectricbicycle[J].JournalofNanjingUniversityofAeronautics&Astronautics,2014,46(1):37-43.
[10]吴玉飞.电动自行车用四相SR电机驱动系统的研究[D].南京:南京航空航天大学,2012.
[11]顾俊.18/24结构电动自行车开关磁阻驱动电机的研究[D].南京:南京航空航天大学,2012.
[12]KerdsupB,FuengwarodsakulNH.Simulationsoftwaretoolsfordesigningswitchedreluctancemotorinelectricbicycles[J].The9thInternationalConferenceonElectricalEngineering/Electronics,Computer,Telecom-municationsandInformationTechnology,2012:1-4.
[13]周涛.电动自行车用开关磁阻电机驱动系统的研究与实践[D].武汉:华中科技大学,2006.
[14]卢铭.电动自行车用开关磁阻电机驱动系统的研究[D].南京:南京航空航天大学,2008.
[15]朱学忠,王云林,张磊,等.四相无中点电容裂相式开关磁阻电机驱动系统研究[J].中国电机工程学报,2014,34(33):5918-5924.ZhuXuezhong,WangYunlin,ZhangLei,etal.Afour-phaseswitchedreluctancedrivesysteminthesplit-phaseconverterwithoutcapacitors[J].ProceedingsoftheCSEE,2014,34(33):5918-5924.
[16]高洁,孙鹤旭,米彦青,等.计及互感的开关磁阻电机单双相励磁静态性能分析[J].电机与控制学报,2012,16(11):45-51.GaoJie,SunHexu,MiYanqing,etal.StaticperformanceanalysisofSRmotorwithsingleanddoublephaseexcitationconsideringmutualinductance[J].ElectricMachinesandControl,2012,16(11):45-51.
(编辑 于玲玲)
Analysis of Electromagnetic Performances on an In-Wheel Switched Reluctance Motor Based on Field-Circuit Coupling
HuYanfangDingWenWuLuming
(School of Electrical Engineering Xi′an Jiaotong University Xi′an 710049 China)
The magnetostatics calculation is firstly carried out for an in-wheel SRM with three phases and 18/24 poles and several performances are obtained,includingL-i-θ,T-i-θ,magnetization characteristics,the distributions of flux linkage and magnetic flux density at different rotor positions.Then the saturation and nonlinear characteristics of SRM are taken into consideration,and co-simulation of field-circuit coupling method based on Simplorer and Maxwell are applied for the SRM to analyze the transient performances and the current and torque curves under various conditions are also presented.Finally,a prototype is manufactured and the experimental waveforms are measured ranging from starting-up,steady operation,variable-speed to load adjustment.The consistent results between simulated and measured waveforms verify the validity of the method and its results.
Switched reluctance machine,in-wheel motor,electric bicycle,field-circuit coupling,Simplorer
国家自然科学基金项目资助(51477130)。
2016-08-12 改稿日期2017-01-01
10.19595/j.cnki.1000-6753.tces.L70146
TM352
胡艳芳 女,1987年,博士研究生,研究方向为开关磁阻电机及其控制。
E-mail:green_mimosa@stu.xjtu.edu.cn(通信作者)
丁 文 男,1981年,副教授,博士生导师,研究方向为特种电机运行理论及控制。
E-mail:wending@mail.xjtu.edu.cn
猜你喜欢
大电机技术(2022年3期)2022-08-06
上海涂料(2021年5期)2022-01-15
核科学与工程(2021年4期)2022-01-12
防爆电机(2021年4期)2021-07-28
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
制造技术与机床(2017年10期)2017-11-28
制造业自动化(2017年2期)2017-03-20
电子设计工程(2017年20期)2017-02-10
大型铸锻件(2015年1期)2016-01-12