
海战仿真系统自然环境通用数据框架研究*
2017-09-03 10:17孙永侃柏羽
现代防御技术 2017年4期
孙永侃,柏羽
(海军大连舰艇学院,辽宁 大连 116018)
海战仿真系统自然环境通用数据框架研究*
孙永侃,柏羽
(海军大连舰艇学院,辽宁 大连 116018)
海战场自然环境仿真是海战仿真系统建设的重要基础。分析了海战仿真系统自然环境仿真的特点与需求,提出了基于多粒度的海战仿真系统自然环境仿真的特征要素;构建了一个海战仿真系统的自然环境通用数据框架,运用动态和静态数据结合和多数据网格组合的方式实现了自然环境要素的XML描述;完成了基于VR- Forces的海战仿真系统自然环境数据设计。建立的自然环境通用数据框架能够为海战仿真系统各模块开发提供快速数据支持。
海战仿真;多粒度;VR- Forces;自然环境仿真;通用数据框架;数据场
0 引言
海战场自然环境指存在于海战场范围内能够对军事活动产生干预作用的各种自然环境因素的总和[1]。海战场自然环境涉及到庞大的数据量,部分环境数据更新速度快,变化规律不明显,且各海战仿真系统按照功能、层次不同,对自然环境的数据需求也各有侧重,因此海战场自然环境仿真始终具有一定的难度。传统依据具体海战仿真系统的需求建立数据库的方式具有较强的针对性,但会消耗大量的时间和成本,扩展与重用能力不强。
一个准确、一致、可重用的自然环境通用数据框架能够有效提高仿真效率,降低开销,更好地管理各类自然环境数据。
VR- Forces自带一个地形处理工具TDB Tools(tool- directed behavior tools),提供用于显示及计算用的地形数据,产生人文特征数据、地理信息数据和标绘数据等[2],为海战场自然环境仿真,尤其是地形仿真,提供了有力的支持。
本文设计了一个基于VR- Forces的海战仿真系统自然环境通用数据框架,为各类海战仿真系统提供自然环境数据支持,进而为系统间的互通互联提供基础。
1 海战场自然环境仿真的特点
海战场自然环境仿真指利用卫星、航天航空、地面等多种侦察手段获取各项海战场自然环境信息后,借助先进的计算机仿真技术、可视化技术、图形图像技术以及多媒体技术,通过计算机对获取到的信息进行综合处理,近似模拟出真实的海战场自然环境,从而为各类作战模拟、装备作战仿真等工作提供虚拟环境的支持[3]。在进行海战场自然环境仿真时应着重体现其多维的结构特征、鲜明的层次特征以及复杂的要素关联特征等[1,4]。
(1) 海战场自然环境具有多维的结构特征
现今的海战场涵盖了海洋、上方天空以及一部分陆地,对应的包含了海战场中海洋范围内的自然环境、天空范围内的自然环境以及陆地范围内的自然环境。三者共同构成整个海战场自然环境。
(2) 海战场自然环境具有鲜明的层次特征
一方面是内容需求的层次性,海战场自然环境的组成要素会随海战目的不同显现出不同侧重;另一方面是精度需求的层次性,海战场自然环境数据的精度需求会随海上作战规模、级别的变化,产生不同的层级特性。
(3) 海战场自然环境具有复杂的要素关联特征
海战场中海洋范围内的自然环境、天空范围内的自然环境以及陆地范围内的自然环境在具有各自变化规律的同时,相互间还存在复杂的关联。通过不断的影响、交互,共同作用于整个海上作战。
2 海战仿真系统自然环境仿真的需求
本文按照维度的区别,将海战仿真系统中自然环境分为3个方面,分别是海洋地形环境、海洋水文环境和海洋气象环境。其中海洋地形环境仿真主要是为模拟整个海洋地形的高低起伏变化,并对依附在地形上的土质、建筑等进行描述;海洋水文环境仿真主要是对洋面水文环境以及水体水文环境2个部分进行模拟;海洋气象环境仿真主要是对覆盖在海洋地形和海洋水文上的气候背景、天气现象等进行模拟。
2.1 海战仿真系统地形环境仿真需求
海洋地形环境涵盖整个海底、海岸以及延伸至一定范围陆地上的全部地形环境,包括整个地形变化以及覆盖在其上的土质、建筑等。
通常整个地形的变化需要借助DEM(digital elevation mod)进行描述。DEM一般通过表面建模得到,常用的建模方式有2种[5]:一种是基于三角形的表面建模,适用于所有的数据结构;另一种是基于格网的表面建模,常用于模拟平缓地区。2种方法分别能够生成TIN(time- invariant network)型DEM或是格网型DEM。由于其数据在整个二维平面上是连续分布的,即对网格上的任意点(x,y)上都有相应的高程数据,因此可以借助一个或多个2D(2 dimensional)数据网格来体现。
2.2 海战仿真系统水文环境仿真需求
海洋水文环境指海洋的整个水体环境,包括海面水文环境以及水体水文环境2个方面。海面水文环境指发生在海平面附近的海面状况,如海浪、海流、海冰、潮汐等。水体水文环境指海洋内部及深处的海区物理、化学、生物等性质及其变动情况,如海水温度、海水盐度、海水密度等基本物理量以及海水传输特性和海洋噪声等。
对于海洋水文环境来说,其属性适用于数据场的形式表现,即可将海洋水文环境对象的各种属性看作在时间和空间上连续分布的场,在任意点(x,y,z,t)上都可以得到相应的属性值。海水温度、盐度等都能抽象为海洋水文环境对象,并可划分为二维水文环境和三维水文环境2类[6],同类水文环境对象可以借助近似的数据场来表现,其中二维水文环境如海浪、潮汐等,三维水文环境如海水温度、海流等。根据具体的数据组织方式,可以进一步将这些海洋水文环境表现为一个或多个2D,3D(3 dimensional)数据网格。
2.3 海战仿真系统气象环境仿真需求
海洋气象环境指覆盖在海洋地形之上的全部大气空间,包括气候背景、气象特性、天气现象3个方面[7]。气候背景指海洋所处区域中大气物理特征的长期平均状态,如平均降水情况、平均日照情况等,通常由气象站点提供直接数据或等值线分布图来显示。气象特性包括大气的基本物理量,如大气温度、大气湿度、大气压强等,以及大气的传输特性。天气现象指发生在天空中的一切物理现象,如风、雨等。
对于海洋气象环境来说,与海洋水文环境类似,同样能够采用数据场的形式进行表现,将风、雾等都抽象为海洋气象环境对象,在任意点(x,y,z,t)上存在相应海洋气象属性值。海洋气象环境涉及到的数据量非常大,为了便于组织这些数据,将其分为二维气象环境和三维气象环境2类,其中二维气象环境如雨、云等,三维气象环境如大气温度、风等,分别可以利用一个或多个2D,3D数据网格进行模拟。
3 基于多粒度海战仿真系统自然环境仿真的特征要素
3.1 海战仿真系统自然环境仿真的多粒度问题
对于海战仿真系统自然环境仿真来说,其数据的粒度能够对仿真运行的效率产生很大影响。理论上,高粒度的自然环境数据更能模拟出真实的自然环境,但高粒度数据的来源往往受到限制,且在系统运行时也会带来很大的负担[8]。
在实际仿真过程中,不同层次、功能的海战仿真系统对自然环境数据的要求存在差异,主要体现在2点[9]:
一是海战仿真系统中自然环境的组成要素会随着系统仿真目的的不同出现差异,如对水面舰艇防空作战进行仿真时,更侧重对水上自然环境的仿真,对水下自然环境的要求相对较低,而对水面舰艇反潜作战进行仿真时则相反;二是海战仿真系统选用自然环境数据的精度会随海上作战的规模、级别出现差异,如进行装备级仿真时,对单武器使用相关的自然环境经度要求较高,而进行联合作战级仿真研究时,对单武器产生影响的小部分自然环境要素可适当忽略处理。
由上述差异可知,没有必要对所有自然环境要素都采用高粒度数据描述。采用多粒度数据对同一自然环境要素进行描述,对时空变化迅速或与仿真实体关系密切的自然环境需采用高粒度数据进行描述,反之采用低粒度数据即可,这样能大大提升系统仿真效率。
在具体仿真时,海洋地形环境数据、海洋水文环境数据与海洋气象环境数据都具有连续分布的特点,可按照具体环境的特点抽象为2D,3D环境类,并以网格形式体现[10]。那么,海战仿真系统自然环境数据的多粒度问题就能够转化为多数据网格的组合问题。
基于海战仿真系统自然环境仿真的多粒度问题,提出与各类海战仿真系统紧密相关的环境特征要素,以便运用面向对象的思想对海战仿真系统自然环境数据框架进行设计与实现。
3.2 海战仿真系统地形环境特征要素
海洋地形环境包括覆盖在整个海底、海岸并延伸至一定范围陆地上的全部地形环境。将其分为海区划分、海面概况、水深和滩质与底质4部分,基本能够涵盖海战场横向及纵向上的地形特征要素,如图1所示。
对海区划分来说,包括海岸带、大陆坡、海峡等,不同海区的地形起伏状况不同,通常采用地形高程数据体现,即可以通过各个任意点上的高程属性来反映整个地形的变化。水深数据特点与之类似,同样可以通过任意点上的水深属性来体现。因此可以将海区划分和水深数据归为2D地形环境(geography_2D)类进行描述。对于海面概况来说,主要包括海面上的各类碍航物和助航设备,滩质底质数据特点与海面概况数据类似,根据这类数据的特征,也可以将其归为geography_2D类。
此外,海洋地形变化缓慢,并且各类军事活动对地形产生的影响较小,地形的变化可以忽略,因此各类海战仿真系统普遍对动态地形要求不高。在此本文将海洋地形数据作为静态数据描述。
3.3 海战仿真系统水文环境特征要素
海洋水文环境随时间变化比较迅速,对仿真实时性影响较大,因此大多使用动态数据进行记录,如图2所示。
对于海水基本物理量来说,其温度、盐度、密度与所在位置及深度相关,其数据呈现三维上的特征,因此可将海水基本物理量作为3D水文环境(hydrology_3D)类进行记录。同样,对于海洋噪声、海水传输特性、海流来说,其数据特征与海水基本物理量类似,也视为hydrology_3D类。而海浪、潮汐、海冰主要作用在海洋的表面,其数据可作为2D水文环境(hydrology_2D)类进行记录。
此外,水文基本物理量如温度、盐度、密度等随时空动态变化;海浪变化复杂,实时性强;海冰会随着海面动态进行无规律变化;海洋噪声也受多方面因素影响,将这些水文环境作为动态数据描述。而传输特性通常能够保持稳定,因此可认为是静态的属性。海流、潮汐的运动数据一般都具有相对稳定的规律性,可以借助数据表作为静态数据记录[11]。
3.4 海战仿真系统气象环境特征要素
海洋气象环境和海洋水文环境类似,变化快且无明显规律,因此基本也采用动态数据进行描述,如图3所示。
对于大气基本物理量来说,其温度、湿度、压强、密度相当于一个在空间上连续分布的场,具有三维特征,因此将大气基本物理量作为3D气象环境(atmosphere_3D)类数据进行记录。同样风、能见度、传输特性等在数据特性上也呈现出这种三维的分布,也将其归为此类。而对于气候描述、雨、雾等气象环境来说,将其数据记为2D气象环境(atmosphere_2D)类即可。
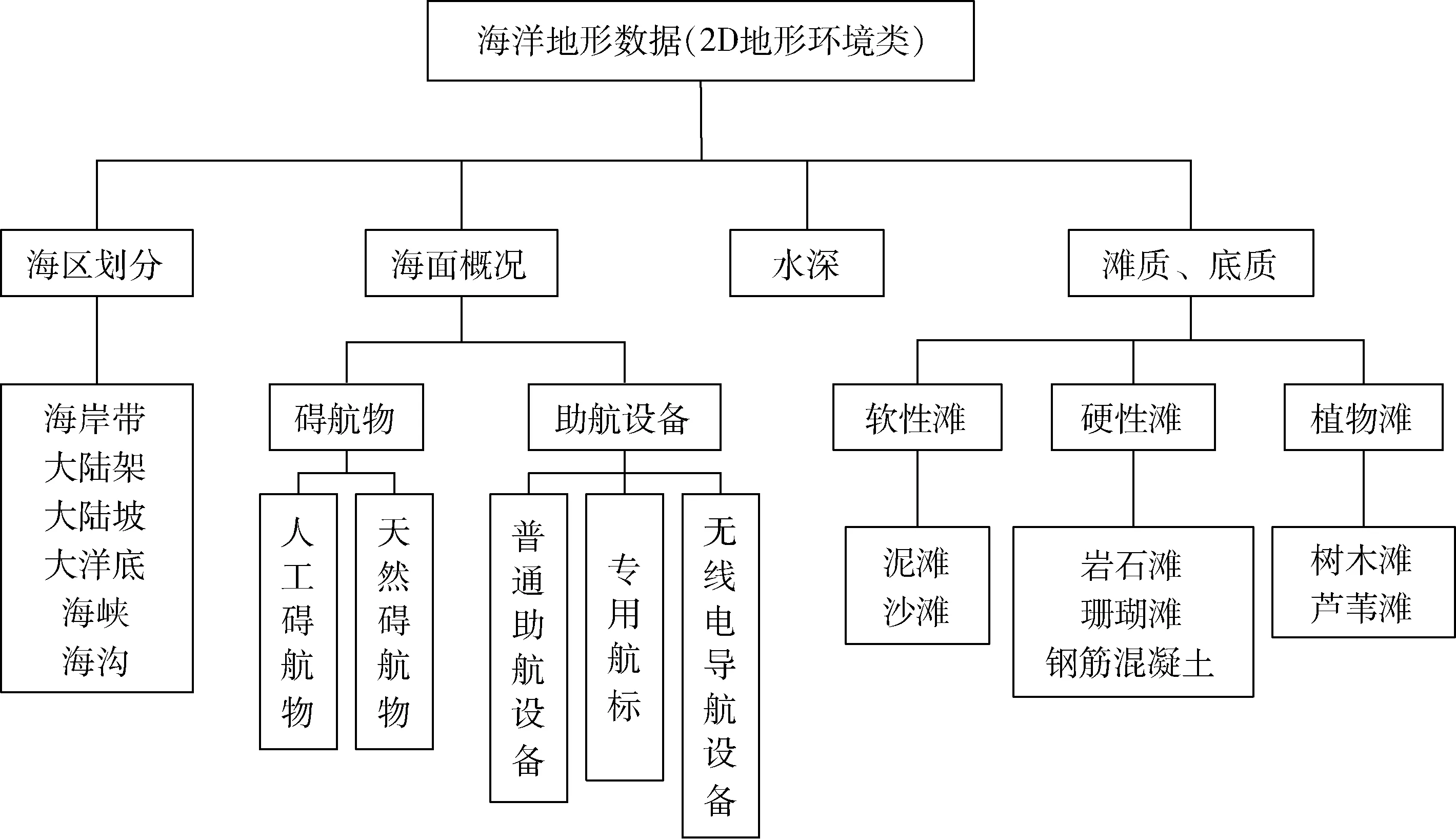
图1 基于多粒度的海洋地形环境特征要素Fig.1 Characteristicelements of ocean topography environment based on multi- granularity
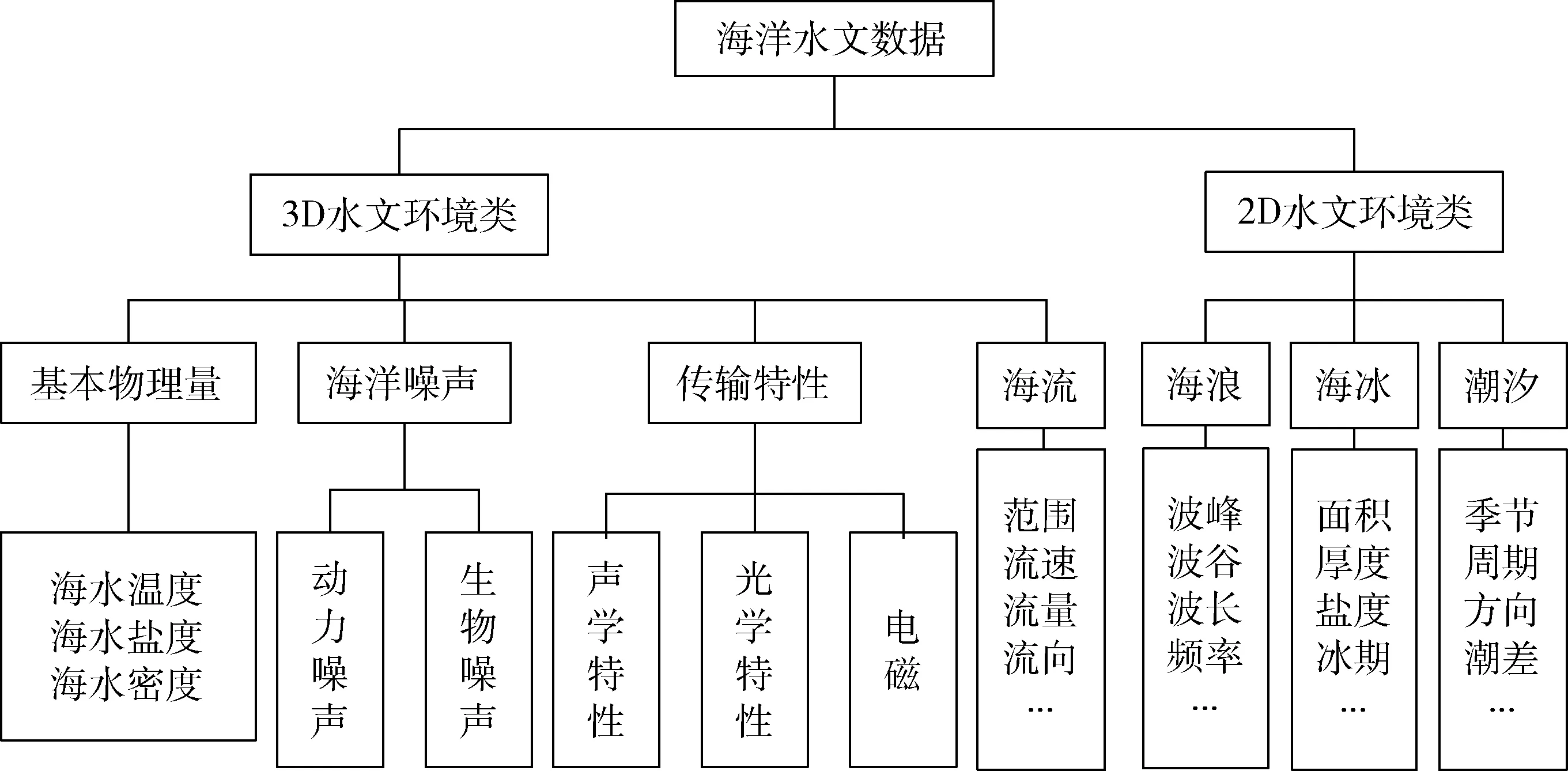
图2 基于多粒度的海洋水文环境特征要素Fig.2 Characteristicelements of ocean hydrology environment based on multi- granularity
此外,除气候描述,即对某一区域总体气候特性进行描述,基本保持不变外,大气对声、光、磁传播的影响也被认为是有固定规律的静态数据[12-13]。而海洋气象的基本物理量,以及风、云、雨、雪、噪声、能见度等要素多随时空变化较快,且互相之间存在影响,需要用动态模型描述,以保证仿真的真实性。
4 海战仿真系统通用自然环境仿真数据框架及描述
4.1 海战仿真系统自然环境仿真数据框架
海战仿真系统是面向海上军事任务的,其自然环境数据框架需要具备2个功能[14-16]:一是需要对近海沿岸到远海以及海底深处到海面上空的范围内,与军事任务有关的所有自然环境要素进行抽象和描述;二是能够与各个数据源以及各类仿真子系统进行交互,具体框架如图4所示。
海战仿真系统环境数据框架涵盖了与海上军事活动密切相关的海洋地形、海洋水文和海洋气象3类环境。其环境数据量十分庞大,将自然环境数据划分为动态和静态2类数据进行描述能够有效提高仿真运行效率。
此外,对于不同功能、层次的海战仿真系统来说,其对自然环境数据的粒度需求往往不同。因此,应对自然环境要素进行多粒度数据描述。自然环境中的各个要素都能够借助独立的数据网格进行记录,利用这种特性,基于面向对象的方式,对多粒度自然环境数据的表示进行分析,其结构图如图5所示。
其中,Field定义了不同类型的自然环境数据,如Geography_2D,Hydrology_3D,Atmosphere_3D等都从Field下继承,分别对海洋地形、海洋水文以及海洋气象中各类环境的数据场进行定义。Grid定义了所有水文和气象数据网格,Rectangle Grid和Curvilinear Grid都是从Grid下继承,主要用于处理海洋水文、气象环境数据。DEM指地形高程数据,包括格网型DEM和不规则三角网DEM 2类,用于处理海洋地形数据。此外,Scenario为不同自然环境类提供了想定接口。Env database(environment database)提供了各类自然环境数据库等数据来源接口。
4.2 海战仿真系统自然环境要素的描述
海战仿真系统自然环境通用数据框架能够为各仿真子系统提供数据支持及数据共享的前提是对数据进行一致、完整、无歧义的分类及描述。基于上述分析,运用面向对象设计方法,将提取出的各环境要素进行类定义。以海洋气象环境中的风为例,首先对风进行要素分解,其描述结构如下:
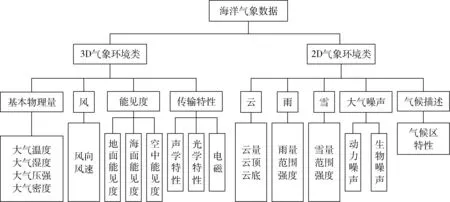
图3 基于多粒度的海洋气象环境特征要素Fig.3 Characteristicelements of ocean meteorology environment based on multi- granularity
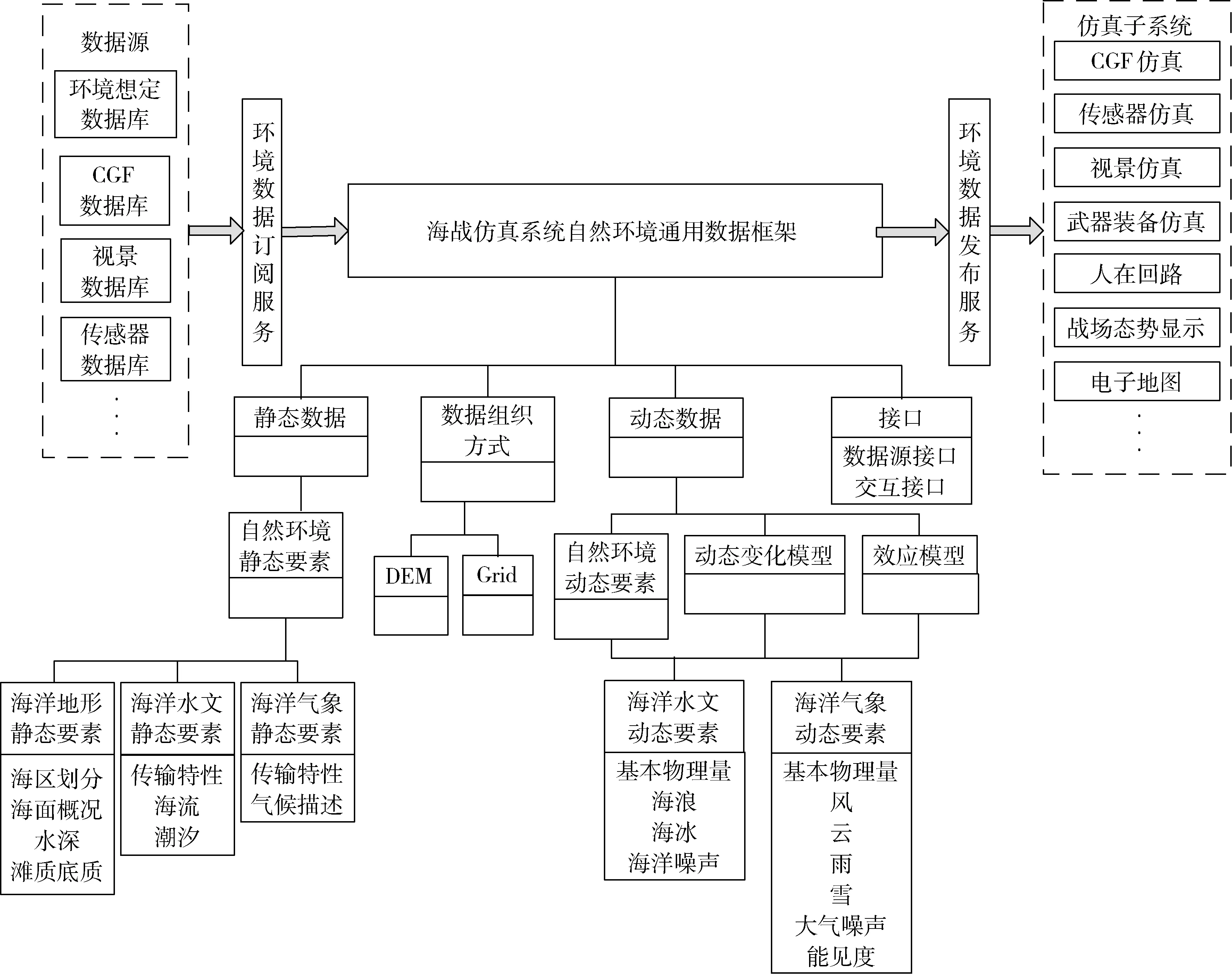
图4 基于多粒度的海战仿真系统自然环境数据框架Fig.4 Natural environment data framework of naval warfare simulation system based on multi- granularity
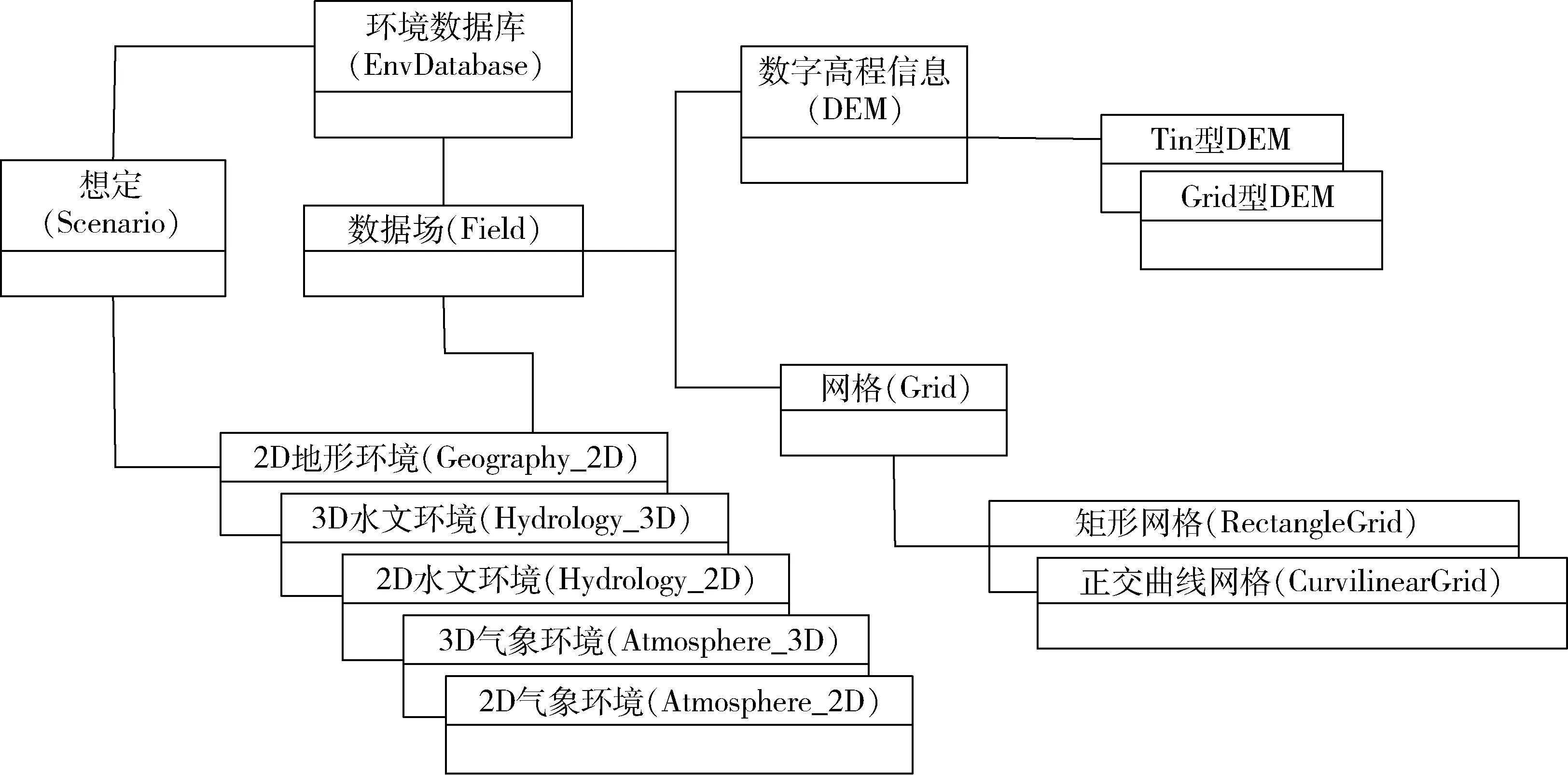
图5 多粒度自然环境数据表示模型Fig.5 Natural environment data model based on multi- granularity
其描述要素主要分为风向wind_direction和风速wind_speed 2类,其中风速在实际仿真过程中又可按照标准坐标分为3个轴向的风速,分别记为wind_speed_x,wind_speed_y,wind_speed_z。
对于风来说,其各要素的描述数据在三维空间中呈现连续变化,则将其风向以及3个轴向的风速归为atmosphere_3D类进行记录,以数据场的形式对风进行描述,在具体仿真时,根据仿真需求通过grid类生成满足需要的数据网格,解决风的多粒度描述问题,结合具体数据,共同形成其描述方式,如图6所示。
5 基于VR- Forces的海战仿真系统自然环境通用数据框架的实现
VR- Forces是SAF(semi automated forces)结构的GCF(computer generated forces)建模与仿真软件。其API(application program interface)使用户可定制VR- Forces中的任何功能,或将VR- Forces功能集成到用户自己开发的应用中。借助该软件能更好地为海战仿真系统的建设提供支持。
5.1 基于VR- Forces的自然环境设计
VR- Forces的二维态势地形为态势显示提供二维位背景和位图显示控制接口,各种格式的位图数据要转化为MAK PVD平台下的GDB格式[17],其GDB地形生成流程如图7所示。
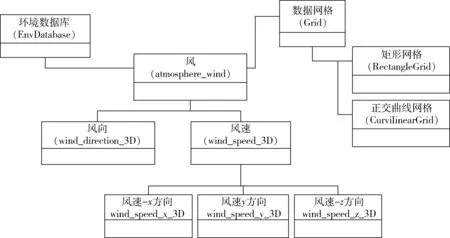
图6 海洋气象环境中风的数据描述结构Fig.6 Data represent structure of wind of ocean meteorology environment
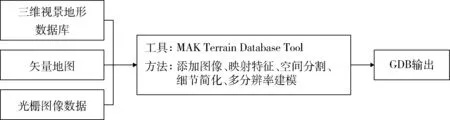
图7 GDB地形生成流程Fig.7 Generating procedure of GDB topography
VR- Forces地形数据库生成方式为构造地形三维模型并制作纹理图片,从而生成三维视景地形数据库,生成过程如图8所示,具体操作步骤如下:
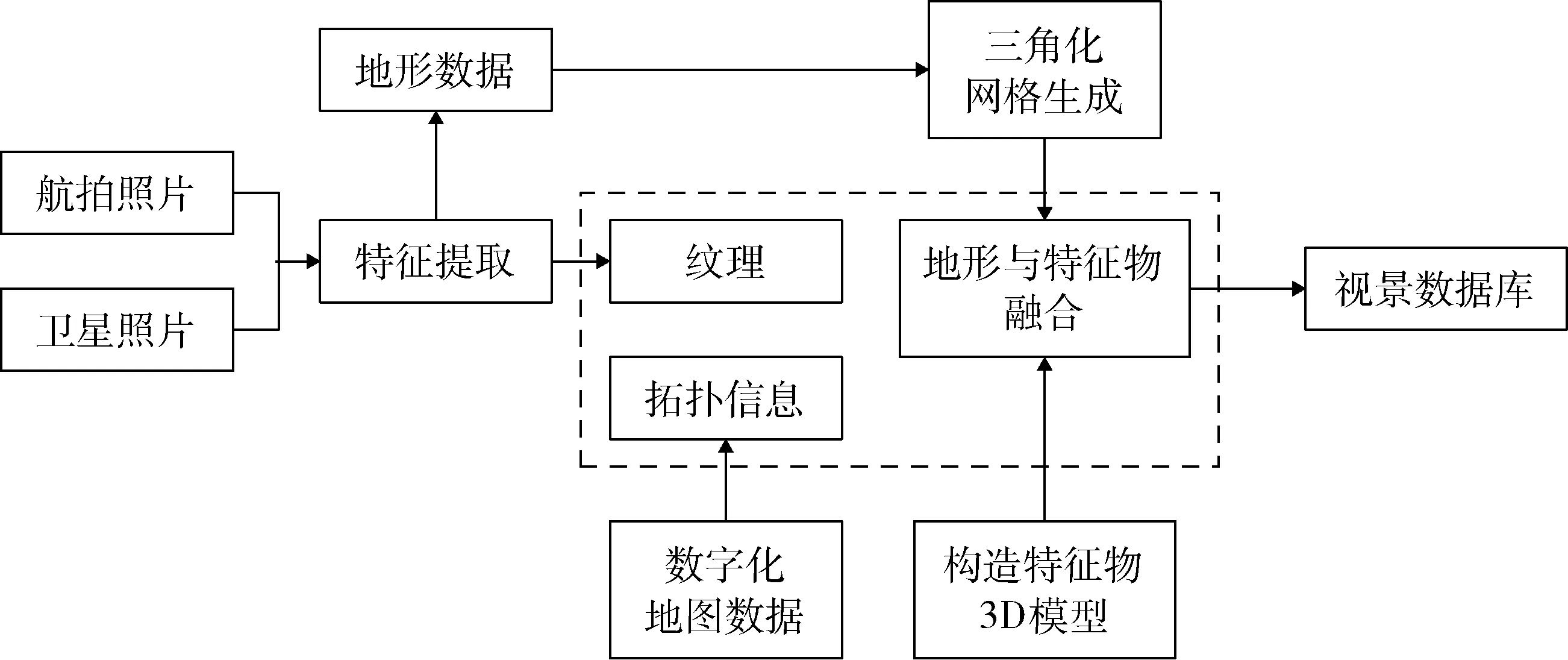
图8 地形数据库生成过程Fig.8 Generating procedure of topography data base
(1) 添加高程数据到新建工程中。通过地形的高程信息,模拟地面的起伏,并对实体运行产生约束。此时会生成GDB和MTD文件,MTD文件记录了高程数据以及纹理贴图数据的坐标位置。
(2) 将卫星照片、航拍照片或纸地图等相关的图片纹理加到GDB的上面,图片若具有坐标数据,会自动对应到GDB上相应的坐标中。此时会生成一个MTP文件,即目前制作的地图。
(3) 地形工程创建完成后,通过设定不同三角面片的属性,使其代表不同类型的地形。在地形中设置一些人文特征的点、线、面数据,这些数据会对实体的碰撞检测与人工智能产生影响。
对于海洋水文、海洋气象来说,其数据多为动态数据,VR- Forces在进行仿真时通常借助其他仿真服务器进行,通过一定的接口与之进行数据交互,获取所需数据。在进行海洋水文、海洋气象仿真时,通常采用2种方法:一是只存储它们的初始数据,离线生成固定时间间隔的动态数据,仿真运行时只需按时间调用相应的数据;二是在仿真系统运行时,利用动态变化模型在不同仿真时刻进行相应的数据更新。
5.2 基于VR- Forces的海战场环境下的作战仿真
建立了海战仿真系统自然环境通用数据框架后,就可以进行具体的作战仿真了。VR- Forces的分布式体系结构可将整个仿真应用分布于多个仿真引擎上,并可通过一个或多个前端远程GUI(graphical user interface)进行控制。而多个前端远程GUI能进行协调训练或剧情生成。借助于远程控制应用程序接口,可定制用户接口或通过其他应用控制仿真引擎[18]。指挥员可以使用VR- Forces GUI定制用户接口,绘制自己的图层和可视化其他的数据。在作战仿真中,VR- Forces实体与地形进行交互、探测,与敌军交战并计算损伤程度。
本文给出如图9~12的仿真实例。图9为VR- Forces环境下生成的海战自然环境,图10为VR- Forces海战场环境下的敌我对峙,图11为VR- Forces海战场环境下的导弹攻击,图12为VR- Forces海战场环境下的导弹命中目标。

图9 VR- Forces环境下生成的海战自然环境Fig.9 Nature environment of naval warfare generated by VR- Forces
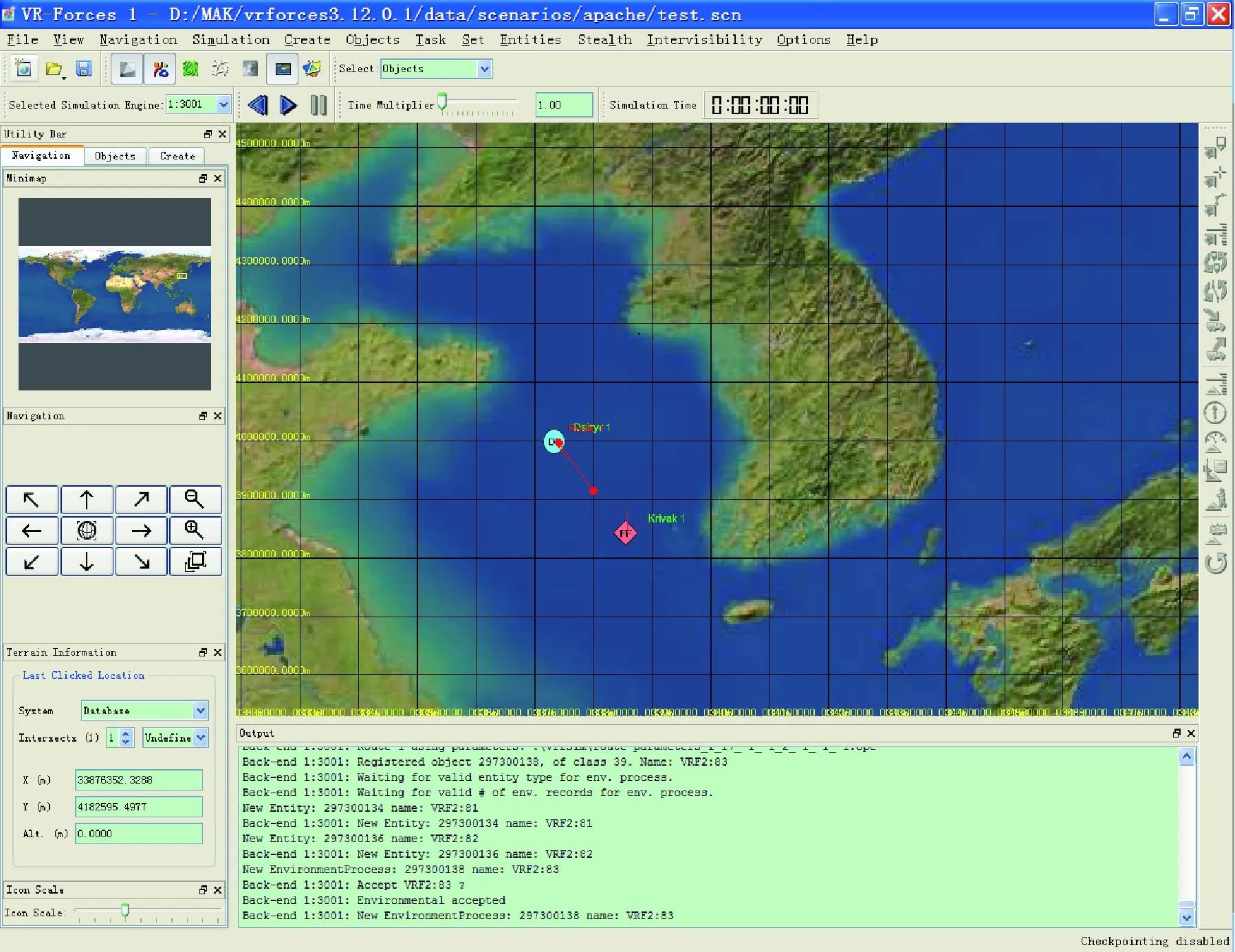
图10 VR- Forces海战场环境下的敌我对峙Fig.10 Confrontation between the enemy and ourselvesin naval warfare environment generated by VR- Forces

图11 VR- Forces海战场环境下的导弹攻击Fig11 Missile attack in naval warfare environment generated by VR- Forces

图12 VR- Forces海战场环境下的导弹命中目标Fig.12 Target hit by missile in naval warfare environment generated by VR- Forces
VR- Forces的可扩展性能够为海战场仿真提供完整的计算机兵力生成环境。在仿真执行过程中,通过生成和执行战场剧情,为战术指挥训练模拟器系统、威胁生成系统、行为模型测试系统提供必需的仿真数据。 指挥员可以通过编辑参数配置文本文件对机动载体的动力学模型、行为、战术、损伤模型、传感器、对策和武器进行配置。指挥员还可以通过简单的鼠标点击和键盘输入方式进行兵力布局、创建行动路线、为实体分派任务和布置计划。对特定战场环境下的特定作战想定进行仿真,从而对作战流程、战场态势、作战结果有具体的认识,为指挥员进行战斗部署提供直观的参考。
6 结束语
海战场自然环境仿真是海战仿真系统建设与发展的一项基础工作。本文在分析自然环境仿真特点与需求的基础上,提出建立基于VR- Forces的海战仿真系统自然环境通用数据框架,并采用动静态数据结合及数据多粒度描述的方式进行数据设计及描述。本文研究的内容已初步应用在海战仿真相关系统研究中。通过对各环境要素进行一致、完整、无歧义的描述,能为仿真系统各模块开发提供快速构建数据模型的支持,以及为开发同一项目与其他组织机构共享合作提供数据基础。
[1] 董志明,郭齐胜,黄玺瑛.战场环境建模与仿真[M].北京:国防工业出版社,2013. DONG Zhi- ming,GUO Qi- sheng,HUANG Xi- ying.Modeling and Simulation of Battlefield Environment[M].Beijing:National Defence Industry Press,2013.
[2] 唐雪梅,李斌.VR- Forces用户指南[M].北京:国防工业出版社,2012. TANG Xue- mei,LI Bin.VR- Forces User Guide[M].Beijing:National Defense Industry Press,2012.
[3] Jack Cogman.Background,Concepts and Current Status of SEDRIS[DB/OL].(2013- 10- 10)[2016- 11- 18].http:∥www.sedris.com/presentation/ITEC_2005(uk).zip.
[4] 郭刚.综合自然环境建模与仿真研究[D].长沙:国防科学技术大学,2004. GUO Gang.Research on Synthetic Natural Environment Modeling and Simulation[D].Changsha:National University of Defense Technology,2004.
[5] 王海滨.基于扫描地图的三维地形仿真[D].南京:南京航空航天大学,2006. WANG Hai- bin.Simulation of 3D Terrain Based on Scanning Map[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2006.
[6] An Introduction to SEDRIS- Sharing & Reuse of Environmental Data Using SEDRIS Standards[S/OL].(2015- 03- 25)[2016- 03- 12].http:∥www.sedris.org.
[7] Paul Berner,Ph,D.Advanced Application of the DRM Ocean Environment- Mapping to the SEDRIS Data Representation Mode[C]∥SEDRISTM Technology Conference Lake Buena Vista,Florida.January 7,2004.
[8] 马千里,陆筱霞,徐华勋,等.虚拟作战空间环境及其数据描述与交换方法研究[J].系统仿真学报,2008,20(9):141-146. MA Qian- li,LU Xiao- xia,XU Hua- xun,et al.Research on the Virtual Battle Space Environment and Its Data Representation and Interchange Method[J].Journal of System Simulation,2008,20 (9):141-146.
[9] 胡艮胜,张国峰.综合自然环境数据共享技术研究[C]∥系统仿真技术及其应用,2005:719-724. HU Gen- sheng,ZHANG Guo- feng.Synthetic Natural Environment Data Sharing Technology Research[C]∥System Simulation Technology & Application,2005:719-724.
[10] 郭圣威,王云江.海洋大气环境数据表示和存储模型[J].系统仿真学报,2010,22 (11):2764-2773. GUO Sheng- wei,WANG Yun- jiang.Representation and Storage Model of Ocean and Atmosphere Environmental Data[J].Journal of System Simulation,2010,22 (11):2764-2773.
[11] 谢孔树,赵国荣,蒋潇睿.海战场自然环境建模与仿真数据模型研究[J].计算机与现代化,2011(11):.51-54. XIE Kong- shu,ZHAO Guo- rong,JIANG Xiao- rui.Research on Naval Battlefield Natural Environment Modeling and Simulation Data Model[J].Computer and Modernization,2011(11):51-54.
[12] 赵鑫,卓力.海洋环境的动态仿真系统研究[J].系统仿真学报,2010,22(7):1618-1621. ZHAO Xin,ZHUO Li.Dynamic Simulation System Based on Marine Environment[J].Journal of System Simulation,2010,22(7):1618-1621.
[13] 谢孔树,赵国荣,蒋潇睿,等.一种基于SEDRIS的海战场自然环境描述方法[J].计算机应用与软件,2012,29(6):196-198. XIE Kong- shu,ZHAO Guo- rong,JIANG Xiao- rui,et al.A SEDRIS- Based Description Method for Sea Battlefield Natural Environment[J].Computer Applications and Software,2012,29(6):196-198.
[14] 梁浩哲,张军,廉蔺,等.基于SEDRIS的综合战场环境数据表示模型[J].计算机与现代化,2008(7):17-22. LIANG Hao- zhe,ZHANG Jun,LIAN Lin,et al.Environment Data Representation Method for Synthetic Battlefield Based on SEDRIS[J].Computer and Modernization,2008(7):17-22.
[15] 胡鹏.仿真综合集成环境中资源描述方法与技术研究[D].长沙:国防科学技术大学,2010. HU Peng.Method and Technology Research on Resource Description in Synthetic Simulation Integrated Environment[D].Changsha:National University of Defense Technology,2010.
[16] 蔡军,许丽人.大气环境仿真的工程化应用研究[J].系统仿真学报,2015,27(1):192-196. CAI Jun,XU Li- ren.Research on Engineering Application of Atmospheric Environment Simulation[J].Journal of System Simulation,2015,27(1):192-196.
[17] 王勃,潘长鹏,张媛,等.VR- Forces开发[M].北京:国防工业出版社,2011. WANG Bo,PAN Chang- peng,ZHANG Yuan,et al.Development of VR- Forces[M].Beijing:National Defense Industry Press,2011.
[18] VT MAK.VR- Forces Developer Guide[K].Revision VRF- 3.12- 2- 090629.
Nature Environment Simulation of General Data Framework for Naval Warfare System
SUN Yong- kan,BAI Yu
(Dalian Naval Academy,Liaoning Dalian 116018,China)
Naval warfare natural environment simulation is an important base for building naval warfare simulation system. The features of natural environment simulation based on multi- granularity for naval warfare are presented based on the analysis of SEDRIS (synthetic environment data representation and interchange specification). A natural environment general data framework of naval warfare simulation system is built. By combining dynamic data and static data or multi data grids, the XML (extensible markup language) of natural environment factors is described. The naval warfare simulation system natural environment data based on VR- Forces (virtual reality forces) are designed. The natural environment general data framework can provide quick data support for the development of all modules of the naval warfare simulation system.
naval warfare simulation; multi granularity;VR- Forces; nature environment simulation; general data framework; data field
2016-03-12;
2016-11-18 作者简介:孙永侃(1965-),男,浙江义乌人。研究员,博士,主要从事作战系统仿真。
10.3969/j.issn.1009- 086x.2017.04.030
E843;TP391.9
A
1009- 086X(2017)- 04- 0195- 10
通信地址:116018 大连市中山区解放路667号软件与仿真研究所张萍萍 E- mail:zpp1975@ 163.com
猜你喜欢
区域治理(2021年13期)2022-01-01
粉末冶金技术(2021年3期)2021-07-28
小哥白尼(军事科学)(2021年4期)2021-07-28
小哥白尼(军事科学)(2021年1期)2021-07-16
陕西档案(2021年2期)2021-05-21
小哥白尼(军事科学)(2021年10期)2021-02-12
小型微型计算机系统(2020年10期)2020-10-21
数码设计(2017年1期)2017-10-13
黄河黄土黄种人·水与中国(2017年2期)2017-03-16
电子制作(2016年19期)2016-08-24
