
DSP多处理器的实时数据共享三余度伺服系统余度管理
2017-09-03 09:22邸彩芸李明星乔森陈金辉陈世坤
单片机与嵌入式系统应用 2017年8期
邸彩芸,李明星,乔森,陈金辉,陈世坤
(1.国网冀北电力有限公司 技能培训中心,保定 071051;2.北京精密机电控制设备研究所)
DSP多处理器的实时数据共享三余度伺服系统余度管理
邸彩芸1,李明星1,乔森2,陈金辉1,陈世坤1
(1.国网冀北电力有限公司 技能培训中心,保定 071051;2.北京精密机电控制设备研究所)
基于TI公司DSP芯片 TMS320F28335 设计了一种多处理器实时数据共享三余度伺服系统,首先搭建了基于McBSP 通信总线的子控制器两两交互通信平台,实现了三余度伺服系统数据共享和信息交互,接着提出了双交互比电流均衡法,实现了三通道间的电流均衡严格同步,解决了余度伺服系统力矩纷争的技术难题,最后重点攻克了控制律用信号表决余度管理,实现三余度伺服故障监测及隔离、余度降级故障平滑切换的技术难题,使伺服系统的实时性和可靠性得到最大程度的提高。
三余度伺服系统;TMS320F28335;多处理器实时数据共享;余度管理
引 言
提高可靠性一般有2种途径:①提高降额设计的裕度;②关键环节进行余度设计。前者以体积和重量为代价,后者通过一些余度措施达到体积重量增加不多、可靠性大幅度提高的目的,是航空航天飞行器经常采用的办法。本文基于TI公司最先进的电机控制专用 DSP芯片 TMS320F28335设计了一种多处理器实时数据共享三余度伺服系统。
1 三余度伺服系统
除机械作动部件由于受安装接口限制不进行冗余外,A/D、DSP、驱动器、伺服电机、电位计等部件均采用三冗余设计。其中DSP选用高速数字处理器TMS320F28335,是伺服系统的控制中枢,负责对控制系统指令和伺服机构运动位移的采集,按照一定控制律实现伺服机构的高动态控制,同时DSP也是进行余度控制和管理的大脑。三路指令分别通过1553B总线站点传递给每个通道的 DSP后,DSP根据使用多数表决算法,对总线上的三个指令和A/D采集到的三个反馈进行表决,DSP再将指令和反馈相减,按照一定的控制策略输出交流永磁同步电机的控制量给电机驱动器,电机驱动器再按照矢量变换的方法驱动电机转动,三路电机的转动通过齿轮组将运动合成到滚珠丝杠,最终安装在滚珠丝杠上的作动杆推动发动机运动。
控制驱动器主要由控制电路模块和以IPM模块为核心的驱动电路模块两大部分组成。控制模块选用TI公司电机控制专用DSP处理器TMS320F28335,驱动模块选用Mitsubishi公司PM150RL1B060,逻辑控制芯片选用Lattice公司的CPLD,外部数据存储器选用256K×16位的SRAM,另外辅以电流、电压、速度检测和PWM 驱动等功能电路。
驱动电路模块采用交-直-交电压型主回路拓扑结构,为交流伺服电动机提供功率驱动,它包括电源电路、驱动电路、逆变电路、保护电路,且控制电源和驱动电源分别独立供电,驱动电源使用继电器进行软启动。采用光耦对PWM驱动信号进行强弱电隔离。
配套伺服电机则采用高比功率设计的3 kW中频永磁同步电机。配套机电作动器采用直线一体式传动机构方案,具有结构紧凑、传动简洁、传动间隙小、装配调试简单等特点。机电作动器主要由永磁同步伺服电机、旋转变压器、滚珠丝杠、线位移传感器以及前后连接支耳等组成。
2 多处理器实时数据共享平台
本文中伺服控制器中每个通道内都采用电机控制器 DSP内外环控制结构,这3个控制器都具有余度管理的功能,它们是3个独立的数字信号处理单元,三者之间采取的Mcbsp总线数字信号是两两通信形式,实现了多个处理器实时数据的共享,实现方法如图1所示,这种“三角形”的两两通信结构正是三余度伺服系统同步、数据共享、信息交互以及余度管理的基础,正是基于这种高效的数据通信模式,多余度控制器的各个子控制器之间才得以有效的协调作业,才能实现控制律用信号的信号表决研究、电流均衡严格同步、故障监测及隔离、余度降级故障平滑切换等关键性技术。
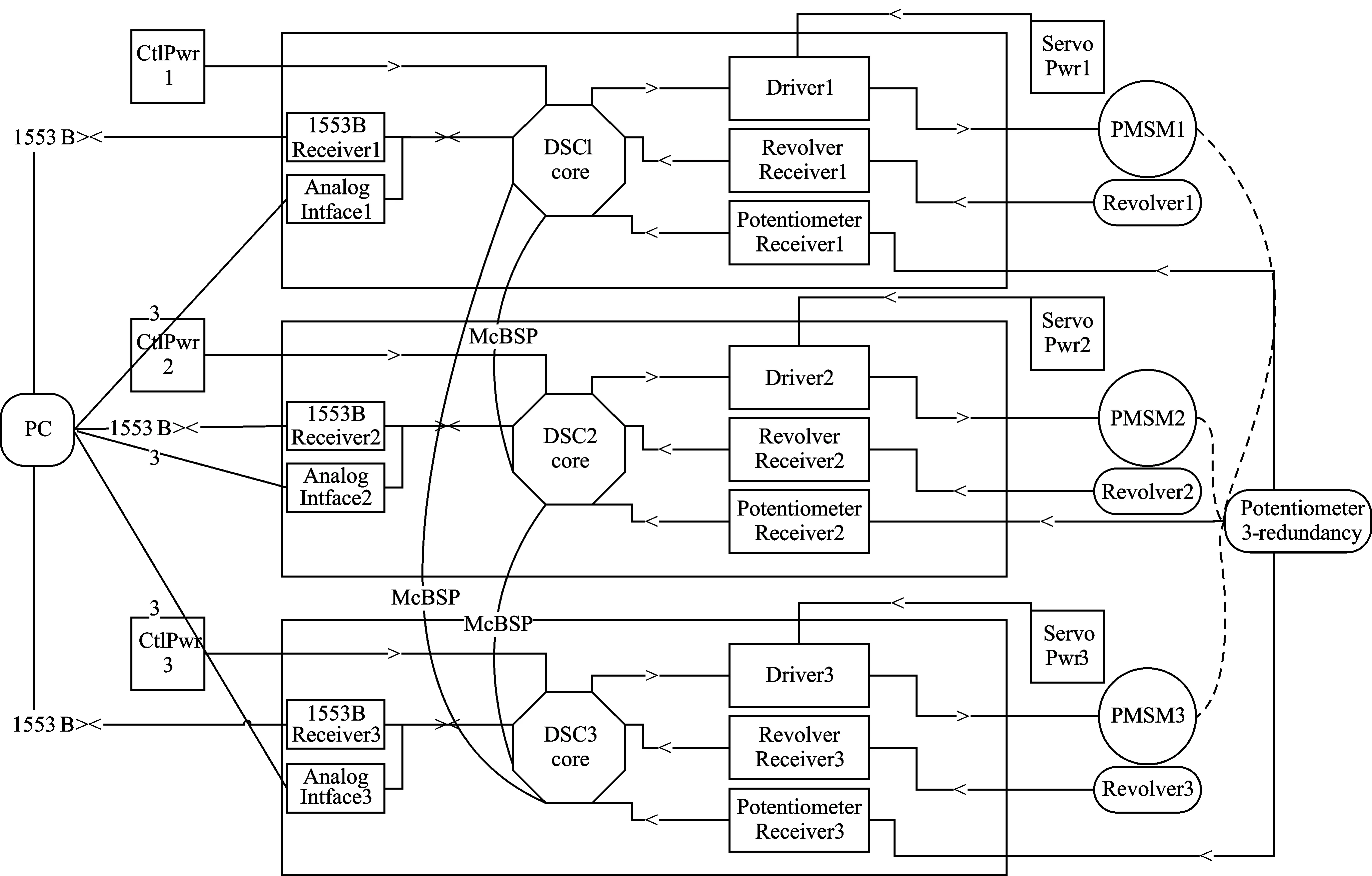
图1 多处理器实时数据共享平台
3 三余度伺服系统力矩纷争
国内对于余度技术已有不少研究,但主要针对余度理论及系统故障诊断方面。伺服机构的冗余合成均通过刚性结构零件的合并统一(如齿轮),必然存在力矩纷争,机电伺服力矩纷争的问题也一直是航天伺服行业技术攻坚的难点。为了避免出现三子通道力矩纷争问题,本文针对部件级余度技术,实现三子通道伺服电机电流均衡严格同步控制进行了重点研究。
三余度伺服系统由三台子控制器组成且互为冗余,只有在三台控制器同一链路完全失效时才无法工作。三个子控制器中嵌入的伺服控制软件完全相同,所以下面仅以其中一个子控制器中的嵌入式伺服控制软件为例进行软件的设计。
三余度伺服系统嵌入式伺服控制软件嵌入在三余度伺服系统的各个子控制器中,主要任务是实现各个子伺服控制器与控制系统之间的通信,接收并执行BC的总线指令,控制A/D转换采集伺服系统数据,进行伺服系统的数字闭环控制及补偿,向BC发送伺服系统状态信息,且三个子控制器之间通过Mcbsp两两之间进行通信和数据交换,通过“三角形”通信结构组建成一个分布式数据交换和仲裁平台,以此实现整个伺服系统和各个子控制器的状态监测和余度管理控制的目的。
针对电流均衡,本文采用双交叉互比法实现电流均衡,双交叉互比法电流均衡是在电流环中实现的,vout1、vout2和vout3速度PI调节器的输出首先作为输入信号输入到电流均衡器,读取三通道伺服电机各自的转矩电流反馈值iq1、iq2和iq3,然后判断三者中的最大值、最小值和中值,然后求取最大值与中值间的误差绝对值的差值εmax和最小值与中间值的误差绝对值的差值εmin,考虑到电流为负反馈,所以对反馈电流大的通道的给定电流值上加εmax,对反馈电流小的通道的给定电流值减去εmin,即可实现电流均衡。电流闭环控制周期本软件中为100 μs,实际电流值较小的通道,其反馈值比原来值减小εmin,电流闭环调节器将会使其电流向增大的方向调节,而对实际电流值较大的通道,反馈值比原来值增大εmax,电流闭环调节器将会使其电流向减小的方向调节,使得电流反馈值最大的和最小的通道都向中值方向调节,从而实现三通道伺服电机的电流均衡严格同步,进而避免了三伺服电机之间的力矩纷争。
4 余度管理
能否及时准确地检测出系统故障并对故障进行隔离是冗余系统设计的关键,本文除采取了比较监控、传感器自监控外,还基于多处理器实时数据共享平台提出了控制器双向监控的通道内自监控方法。
三余度伺服系统的故障失效故障模式如表1所列,虽然构成伺服机构的零件及元件有几百种,但是任意一个零件及元件的故障均最终体现在以下7种故障模式中,比如电机绕组断裂,其对外表现就是电机停转。
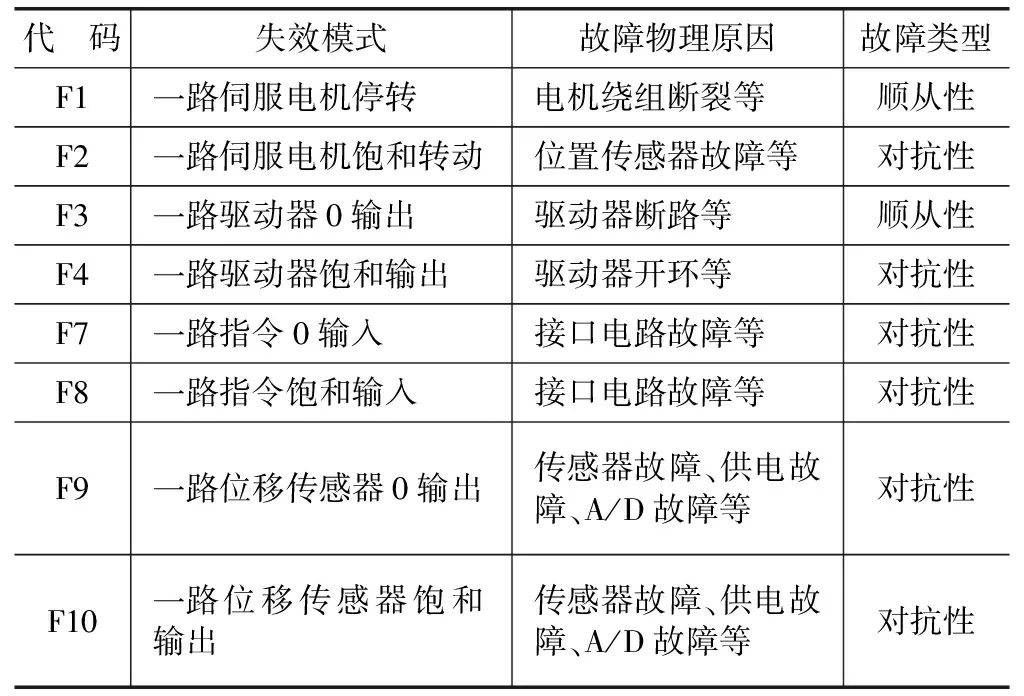
表1 失效故障模式
针对故障率较高的元器件中,反馈电位计、接口电路、A/D转换器等故障(表现为指令和反馈信号故障)已采取表决的方式将故障吸收。控制器、驱动器和伺服电机的故障不易通过表决解决,采用监控和隔离的方式解决。
故障点的监测由该通道DSP单独完成,信息共享,故障监测信息点如表2所列。
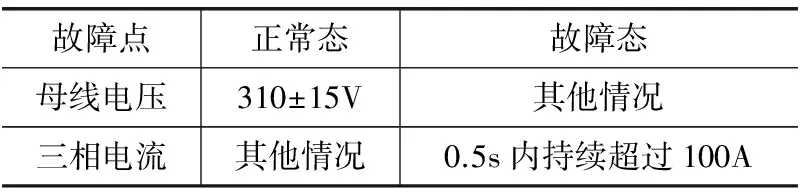
表2 故障监测点及故障域值
故障模式中,一路电机轴卡死、一路电机异常输出、一路驱动器异常输出、一路控制器异常输出等对抗性故障模式,都可以导致驱动器电流异常增大;一路电机停转、一路驱动器零输出、一路控制器零输出等顺从性故障模式,都会导致驱动器零电流,监控面设置分析图如图2所示。因此,可监控驱动器电流,若某一通道电流异常增大,超过设定的门限值,则判定此路为瞬态故障,并通过多处理器实时共享平台采用余度降级平滑切换技术,余度伺服机构在一度故障情况下仍能实现伺服机构的基本功能,能实现对信号的跟踪,故障切换过程中无位移速度电流的畸变,进而实现三余度伺服系统的高可靠性。
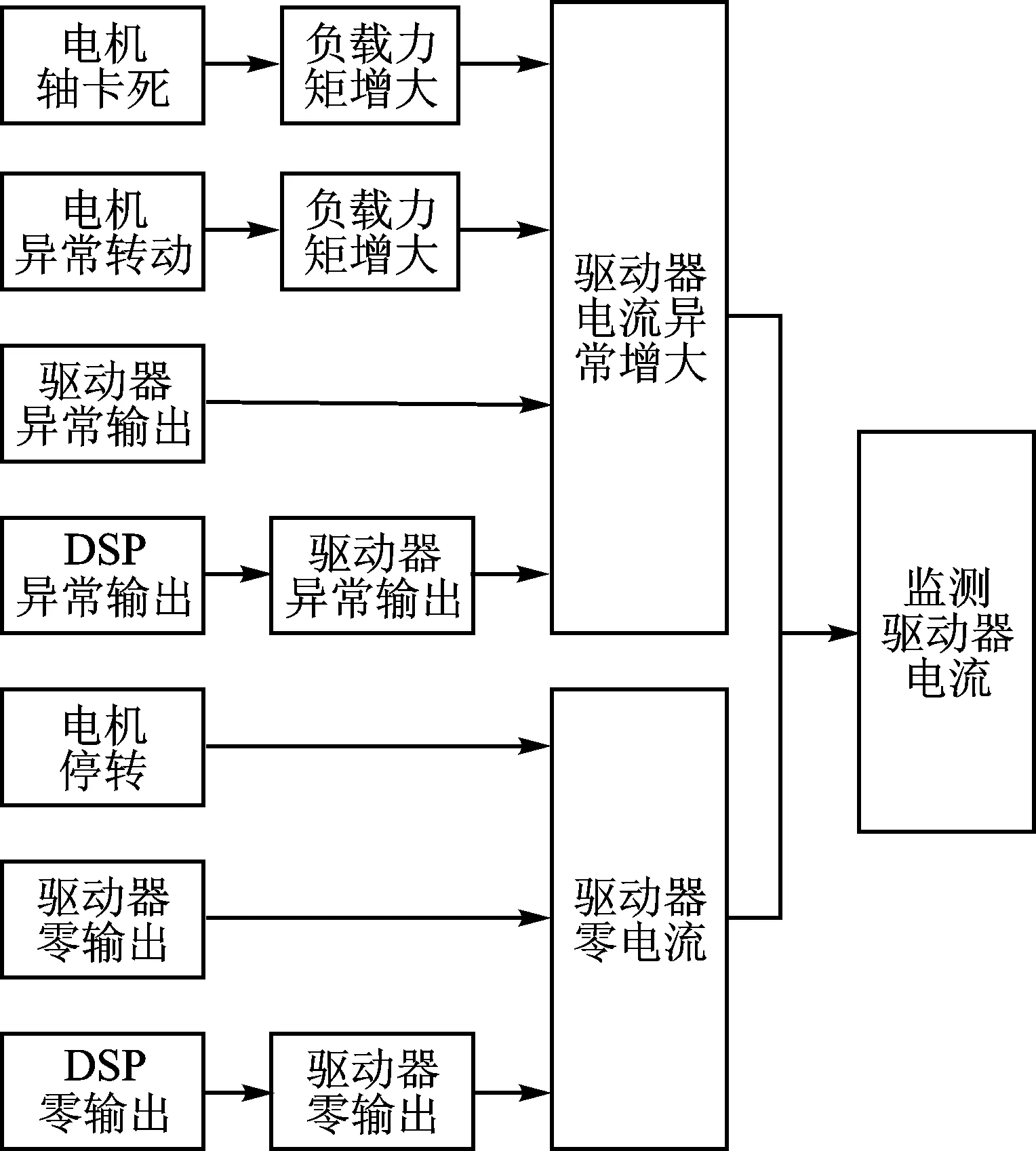
图2 监控面设置分析图
5 冗余故障实验
系统一度故障主要包括两类:信号级故障包括一路指令信号异常和一路反馈信号异常;控制级故障包括一路控制器、驱动器或电机的异常输出。
其中,信号级故障通过表决解决,表决后可以吸收一度故障,系统与无故障状态一致;控制级一度故障需要进行检测和隔离,否则系统性能会大幅降低或无法运行,本文只列举两类典型的控制级一度故障试验,包括顺从性故障和对抗性故障。
顺从性故障指该故障不阻碍无故障部分的正常工作,如一路伺服电机停转;对抗性故障指该故障将阻碍无故障部分正常工作,伺服机构必须额外克服该故障才能输出相应的运动,如一路控制器异常输出。
5.1 顺从性故障
由上位机编程设定位置指令信息,位置指令设定为不同频率,幅值为30°的阶跃信号,高低速切换运行,运行过程中注入故障指令进行驱动器PWM封锁处理,模拟故障过程,同时三冗余驱动器实时反馈各自电机的电压、电流、位移、速度信号,通过位置指令信号和采集的三通道电机的电压、电流、位移、速度信号来判断三余度系统顺从性故障时各通道电机的位移、速度或电流是否有畸变。
要求三余度机电伺服机构在故障处理过程中运动平稳,不得有突跳等异常动作现象。
试验结果如图3所示,由图3可知:由于两台电机的功率能满足最大输出,并且三余度控制器实时反馈各自的电压、电流、位移、速度信号,因此在一度顺从性故障情况下伺服机构在故障处理过程中运动平稳,没有突跳等异常动作现象,系统继续正常运行。
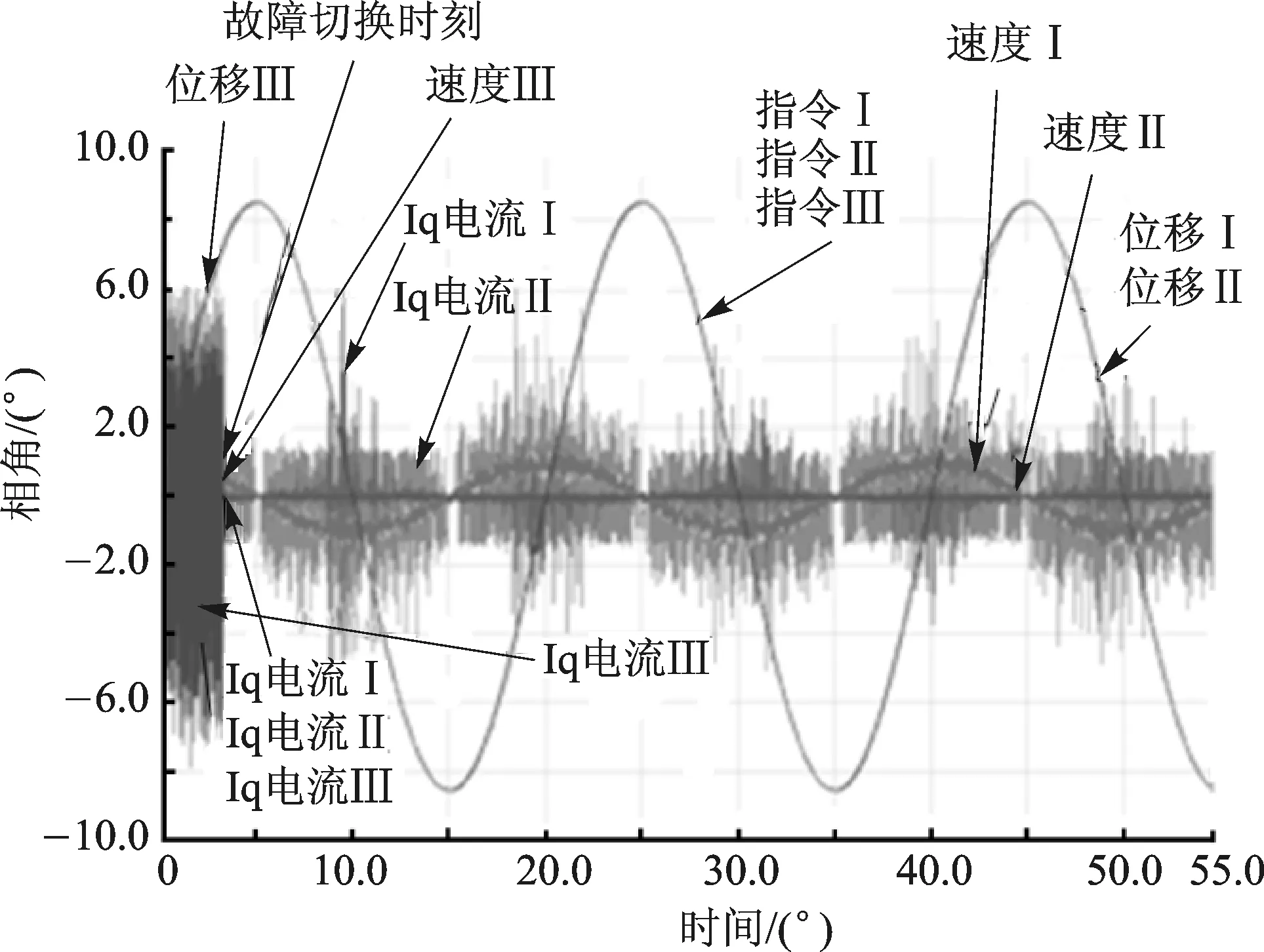
图3 顺从性故障试验
5.2 对抗性故障
由上位机编程设定位置指令信息,位置指令设定为0.05 Hz,不同幅值的正弦信号,运行过程中0输入指令和正常幅值指令切换,模拟位置指令0输入故障过程,同时三冗余驱动器实时反馈各自电机的电压、电流、位移、速度信号,通过位置指令信号和各自电机的电压、电流、位移、速度信号来判断三余度系统对抗性故障时各通道电机的位移、速度或电流是否有畸变。要求三余度机电伺服机构在故障处理过程中正常工作,运动平稳,不得有突跳等异常动作现象。
试验结果如图4所示,由图可知:三余度机电伺服机构在对抗性故障处理过程中运动平稳,没有突跳等异常动作现象。但由于一路电机对抗系统输出,成为负载,系统性能降低。
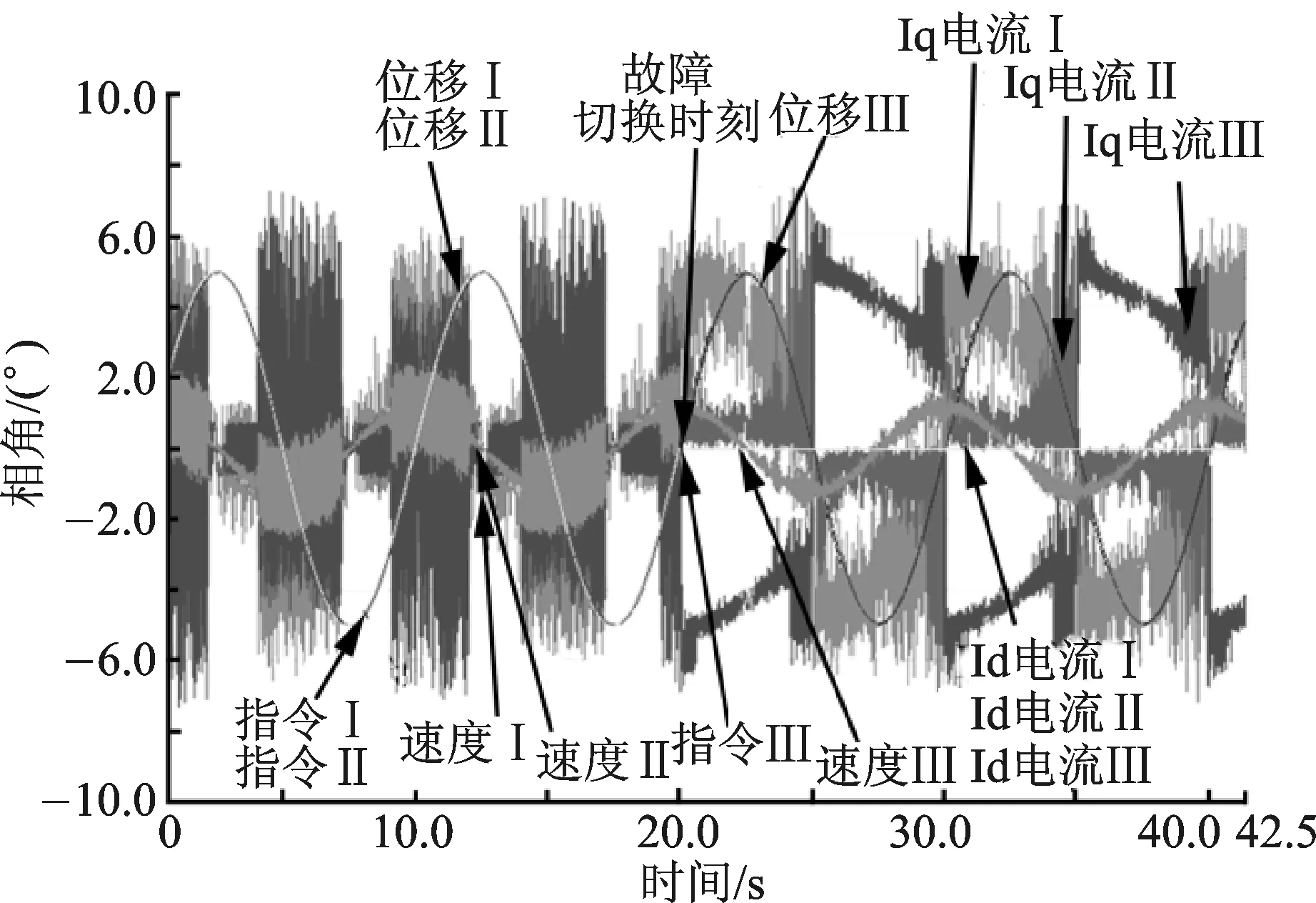
图4 对抗性故障试验
结 语

[1] 陈伯时,陈敏逊. 交流调速系统[M].北京:机械工业出版社, 1998.
[2] 郭庆鼎,王成元.交流伺服系统[M].北京:机械工业出版社,1994.
[3] Bin Zhang,Yaohua Li.A PMSM Sliding Mode Control System Based on Model Reference Adapative Control.Power Electronics and Motion Control International Power Electronics & motion control confevence;2000(1):336-341.
[4] Texas Instruments.Implementation of Vector Control for PMSM Using the TMS320F28335 DSP, 1998.
[5] 陈伯时.电力拖动自动控制系统-运动控制系统[M].3版.北京:机械工业出版社,2003:200-205.
[6] 刘和平.DSP原理及电机控制应用: 基于TMS320LF240x系列[M].北京:北京航空航天大学出版社,2006.
邸彩芸(讲师),主要研究方向为电工电子技术和电力传动相关技术。
主编点评: 视线追踪控制的文章日益增多,这类应用将人眼从视角追踪变成了视觉控制的眼球运动,势必改变人眼视觉的生理功能,由此带来的人类视觉生理变化须从医学角度认真考虑。这类应用不只是技术问题。
Real-time Data Sharing Triple Redundant Servo System Redundancy Management Based on DSP Multiprocessor
Di Caiyun1,Li Mingxing1,Qiao Sen2,Chen Jinhui1,Chen Shikun1
(1.Skills Training Center,State Grid Jibei Electric Power Company,Baoding 071051,China; 2.Beijing Institute of Precision Mechatronics and Controls)
A multiprocessor real-time data sharing triple redundant servo system based on TMS320F28335 is designed in this paper.Firstly two interactive communication platforms for the child controller which based on Mcbsp bus are built,and the three degree servo system data sharing and information interaction are realized.Then a bolder new approach named double interactive comparison current balance is proposed,which realizes current balance strict synchronization,it gives a good solution of the triplex redundancy servo’s torque disputes.Finally the key research on voting control strategy redundancy management is studied to attain a high reliability of redundancy degradation smooth switching.The product not only has good function performance but also has high reliability.
triple redundant servo system;TMS320F28335;multiprocessor real-time data sharing;redundancy management
TP273
A
�迪娜
2017-04-21)
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
科技与创新(2021年2期)2021-01-29
装备制造技术(2019年12期)2019-12-25
飞控与探测(2019年4期)2019-09-09
测控技术(2018年12期)2018-11-25
西北工业大学学报(2018年4期)2018-09-07
舰船科学技术(2017年11期)2017-11-27
制导与引信(2016年3期)2016-03-20
北京航空航天大学学报(2016年4期)2016-02-27
西北工业大学学报(2015年1期)2016-01-19
