高空清洁机器人的设计与实现
2017-09-28 07:56陆晓敏吴浩真韩可炯秦家晨
电子测试 2017年8期
陆晓敏,吴浩真,韩可炯,秦家晨
(东南大学成贤学院电子与计算机工程学院,江苏南京,210088)
高空清洁机器人的设计与实现
陆晓敏,吴浩真,韩可炯,秦家晨
(东南大学成贤学院电子与计算机工程学院,江苏南京,210088)
在高层建筑中,外壁玻璃上会有许多的粉尘和其他污物,用我们设计的机器人来代替人进行高空作业。本文设计了一种基于MSP430f149的智能清洁机器人系统, 介绍了擦窗机器人设计的意义、硬件结构设计及系统软件设计。
0 引言
近年来,随着国内经济的发展,城市高层建筑成倍的增长,由于高层外壁的玻璃随着时间的积累,外壁玻璃上增加了许多的粉尘和其他污物。至今,有95%城市高楼玻璃外壁采用的是人工清洗完成,它不仅投入大、效率低,费工费时,而且及其危险。随着单片机和机电技术的发展,高空清洁机器人应运而生。利用高空清洁机器人作业将大大降低高层建筑的清洗成本,改善工人的劳动环境, 提高劳动生产率,具有相当大的社会、经济意义和广阔的应用前景。
1 硬件结构设计
机器人主要有吸附装置、电机驱动模块、降压模块、无线模块、电调、红外传感器、电源及单片机主控模块等,如图1所示。
我们利用涵道风扇将底部一个小区域内空气抽走,该区域内形成类似真空状态,外界大气压将车体压在墙上。利用涵道风扇吸附,其操作简单,只需输入5%-10%的PWM波占空比就可以驱动,它重量也在可接受范围内,动力足,扇叶不会伤到人。涵道风扇穿过车体中央,将涵道风扇固定在车体中,填充其缝隙,以保证工作过程中其区域更加接近真空状态。
高空擦玻璃,主要是要能行走,为了增加摩擦力、不刮擦玻璃,采用橡胶材料的履带,通过左右履带的差速来实现转向,实现机器人自由移动。
在机器人车体前后左右装有红外传感器,能测大概十厘米距离。该传感器本身具有测量准确、无需接触、防腐蚀、成本低等特点。

图1 机器人硬件整体设计
我们用的电池是12V的航模电池,需要降压模块将12V降到3.3V给单片机供电;将12V降到7V左右给电机供电;直接接电调,将电流升到70A,驱动涵道。
无线采用NRF24L01 2.4G模块,功耗低,在以-6dBm 的功率发射时,工作电流只有9mA;接收时,工作电流只有12.3mA,多种低功率工作模式(掉电模式和空闲模式),使节能设计更方便。
清洁装置配备可拆装的抹布,放在机器人底部。此外涵道实时抽底部小区域内的空气,在机器人行走过程中,还可以将玻璃表面的灰尘也吸走一部分。
在电池选型时要考虑其质量轻、续航久等情况。我们设计了一个接线口,可用降压模块将220V电压降为12V,为整个系统供电,可供有条件者使用。
2 软件部分设计
本设计选用TI公司生产的MSP430f149单片机作为控制器。程序设计的好坏直接决定了整个系统的控制质量和控制效率,如图2为程序流程图。软件部分主要有端口配置、定时器、PWM输出、无线、LCD显示等模块组成。
系统上电后,初始化各个模块,然后进入睡眠模式。等待按键选择运行模式。
考虑到机器人自动擦玻璃,难免会有死角部分不能达到理想情况,我们设计了自动控制为主,手动控制清理死角处为辅的模式。
自动模式:机器人从玻璃左下角开始行走,定时扫描各传感器状态,检测是否到达玻璃边沿。若检测到,单片机控制机器人差速、倒转,向左后方行驶;继续检测后面玻璃边沿,然后控制机器人向正前方走。如此循环往复,走出一条“之”字形路径。
手动模式:在遥控器端,设置了四个按键,分别控制前进、后退、左转、右转,并通过LCD1602屏幕显示。通过NRF24L01将数据传给接收模块,接收模块接收后,与单片机进行SPI数据通信,传给单片机,单片机根据接收到的数据,判断要执行什么操作。
因为电池经常充放电,所以输给涵道的PWM波占空比不可能一直不变。一般设计要满足在电池电量最低时还能使整个装置吸附在玻璃上,所以PWM波占空比要给足够大,但是如果刚充满电,电量充足,会导致吸附力很大,造成能源浪费。所以使用单片机的ADC对电池采样,监控电池的电量。调节PID,根据电量的多少来调节PWM波占空比的输出。
3 结语
本文介绍了基于单片机控制的高空清洁机器人。该方案实现简单,较市场其他产品而言更为低廉。并且创新在于有自动、手动两种模式,可以重点清洁部分难清洁的地方;可以根据电池的电量自动改变吸附力,不会造成电量的损耗;其还可以接220V家庭用电,不必考虑充电问题,设计更为贴合实际情况。
[1]沈建华、杨艳琴.MSP430超低功耗单片机原理与应用(第二版).清华大学出版社.
[2]华成英.模拟电子技术基本教程.清华大学出版社.
Design and Implementation of High Altitude Cleaning Robot
Lu Xiaomin, Wu Haozhen, Han Kejiong, Qin Jiachen
(Southeast University Chengxian College Electronic and Computer Engineering Institute,Nanjing Jiangsu,210088)
ion:In the high-rise building, there will be a lot of dust and other dirt on the glass wall, we design a robot instead of high-altitude operations. This paper designs a kind of intelligent cleaning robot system based on MSP430f149, introduces the design of window robots to clean the meaning of hardware structure design and software design of the system.
Depending on the robot fan device body adsorption on the glass, can automatically complete the path planning, detection window edge distance, automatic cleaning windows. It also can choose manual control mode, through wireless control, custom path, the key to clean the dust, serious dirt place.
glass;high altitude;cleaning;robot;microcontroller
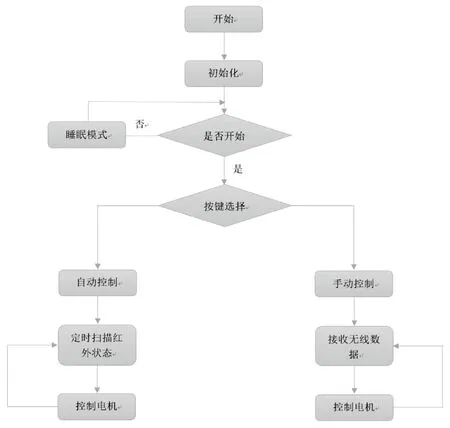
图2 程序流程图
机器人依靠车体的风机装置吸附在玻璃上,可以自动完成路径规划、探测窗户的边角距离、自动清洁窗户。另外也可选择手动控制模式,通过无线控制,自定义路径,重点清洁风尘、污物严重的地方。关键字:玻璃;高空;清洁;机器人;单片机
猜你喜欢
军事文摘(2022年16期)2022-08-24
环球时报(2022-02-28)2022-02-28
小天使·一年级语数英综合(2019年2期)2019-01-10
石油化工建设(2018年3期)2018-11-30
小天使·一年级语数英综合(2018年11期)2018-11-23
小学阅读指南·低年级版(2018年5期)2018-11-02
四川水力发电(2018年4期)2018-03-25
发明与创新(2016年5期)2016-12-18
铁道通信信号(2016年8期)2016-06-01
核科学与工程(2016年3期)2016-01-03