五自由度混联机器人逆动力学分析
2017-10-11 01:35张东胜许允斗姚建涛赵永生
农业机械学报 2017年9期
张东胜 许允斗,2 姚建涛,2 赵永生,2
(1.燕山大学河北省并联机器人与机电系统实验室, 秦皇岛 066004;2.燕山大学先进锻压成形技术与科学教育部重点实验室, 秦皇岛 066004)
五自由度混联机器人逆动力学分析
张东胜1许允斗1,2姚建涛1,2赵永生1,2
(1.燕山大学河北省并联机器人与机电系统实验室, 秦皇岛 066004;2.燕山大学先进锻压成形技术与科学教育部重点实验室, 秦皇岛 066004)
基于一种具有两转动一移动(2R1T)3自由度的并联机构2RPU/UPR构造了5自由度混联机器人,该5自由度混联机器人具有结构简单、运动学模型简单及模块化程度高的特点。为解决该5自由度混联机器人的动力学问题,首先推导出了并联机构各分支和并联机构动平台独立运动参数之间的3×3速度雅可比方阵;然后求得了并联机构各分支质心速度与动平台质心广义速度之间的速度映射矩阵,并建立了UPR分支和RPU分支的运动学模型,且基于虚功原理建立了并联机构2RPU/UPR的动力学模型;其次运用达朗贝尔原理对并联机构所串联的单自由度摆头进行受力分析,建立单自由度摆头和并联机构动平台之间的力学关系;最后运用Matlab和ADAMS仿真软件,对机器人的理论动力学模型进行了仿真验证,通过所得结果的对比分析验证了理论模型的正确性。
混联机器人; 并联机构; 动力学模型; 虚功原理; 达朗贝尔原理
引言
近年来少自由度并联机构引起了广大学者的研究[1-2],尤其是具有两转动一移动(2R1T)的3自由度并联机构,与具有5自由度和6自由度机构相比,它具有结构简单,运动耦合较弱,易于实现控制,制造成本低等特点[1,3-4]。然而,在工业机器人应用领域,许多工作任务例如曲面加工、焊接、切割、装配、分选等,其要求机器人末端操作器的空间自由度至少为5,所以研究人员将串联和并联机构结合,构造了多种5自由度串并混联机器人。混联机器人结合了并联机构结构紧凑、刚度高、动态响应快和串联结构灵活性好、工作空间大的特点,得到了广泛的关注和研究[5-7]。
最为典型的是在2R1T并联机构上串接具有2自由度的摆头而构成的5自由度混联机器人,比如瑞典Neos Robotics公司开发研制的Tricept 5自由度混联机器人,瑞典Exechon公司开发的Exe系列5轴加工中心,以及天津大学开发的Trivariant 5自由度混联机器人,它们分别是在2R1T 机构3UPS/UP、2UPR/SPR及2UPS/UP上串接2自由度摆头构成的混联机器人(R、P、S和U分别表示转动副、移动副、球副和虎克铰)[8-13]。目前,国内外学者已对混联机器人作了大量研究,包括构型设计与综合[14-16]、运动学[5,17]与动力学研究[18]等。其中关于混联机器人动力学模型的研究工作尚不多见,然而机器人动力学模型是进行动力学分析与综合的基础,同时也是实现机器人高精度实时控制的前提。动力学的分析结果可用于模拟仿真、驱动器选型、机械振动分析及动力学优化等方面。
常采用的动力学建模方法主要有:拉格朗日方程[19]、牛顿-欧拉法[20]、Kane方程[21]、达朗贝尔[22-23]及虚功原理[24-25]等。其中拉格朗日方程需要求取每个零部件的动能和势能,牛顿-欧拉法及Kane方程涉及到微分方程,这将导致混联机器人的动力学计算量较大;达朗贝尔原理是利用物体所受外力、动力及结构反力之和为零的原理构建动力学关系方程;虚功原理是对于系统微小位移或变形,体系上所有外力及内力所作虚功之和为零。虚功原理和达拉贝尔原理基于其便于理解及易于建立的优点,在机器人的动力学建模中得到了广泛的应用。本文将结合虚功原理和达朗贝尔原理,对一种基于2R1T并联机构2RPU/UPR[26]构造的5自由度混联机器人进行动力学分析,并借助Matlab和ADAMS软件对5自由度混联机器人进行动力学仿真和验证。
1 5自由度混联机器人构型描述
根据2R1T并联机构中转轴空间分布性质可将该类并联机构分为3种类型:PRR、RRP和RPR。2条转动轴线均靠近动平台的为PRR类型,如3RPS、2PRU/PRS并联机构;2条转动轴线均靠近定平台的为RRP类型,如2UPR/SPR、3SPR并联机构;1条轴线靠近定平台,另1条轴线靠近动平台的为RPR并联机构,如2UPR/RPU、2RPU/UPR并联机构。上述给出的几种并联机构中,所列举的RPR类型的2种机构具有单自由度关节数目少的特点,且2条转动轴线为连续转轴,具备运动学模型简单的特点[3,26]。
了解2R1T并联机构转轴空间性质,有助于快速构造5自由度混联机器人。针对2R1T并联机构的2个转动自由度,PRR类体现的是动平台的转动能力(调姿能力),故需串接2个具有大范围移动能力的平台(PP); RRP类体现的是动平台大范围内的移动能力,故需串接具有2个方向转动能力的摆头(RR);RPR类体现的是动平台1个方向的移动能力和1个方向的转动能力,故需串接1个单自由度摆头和1个移动平台(RP)。5自由度混联机器人的3种构型设计方案如表1所示。
表1构型方案设计
Tab.1Configurationdesign
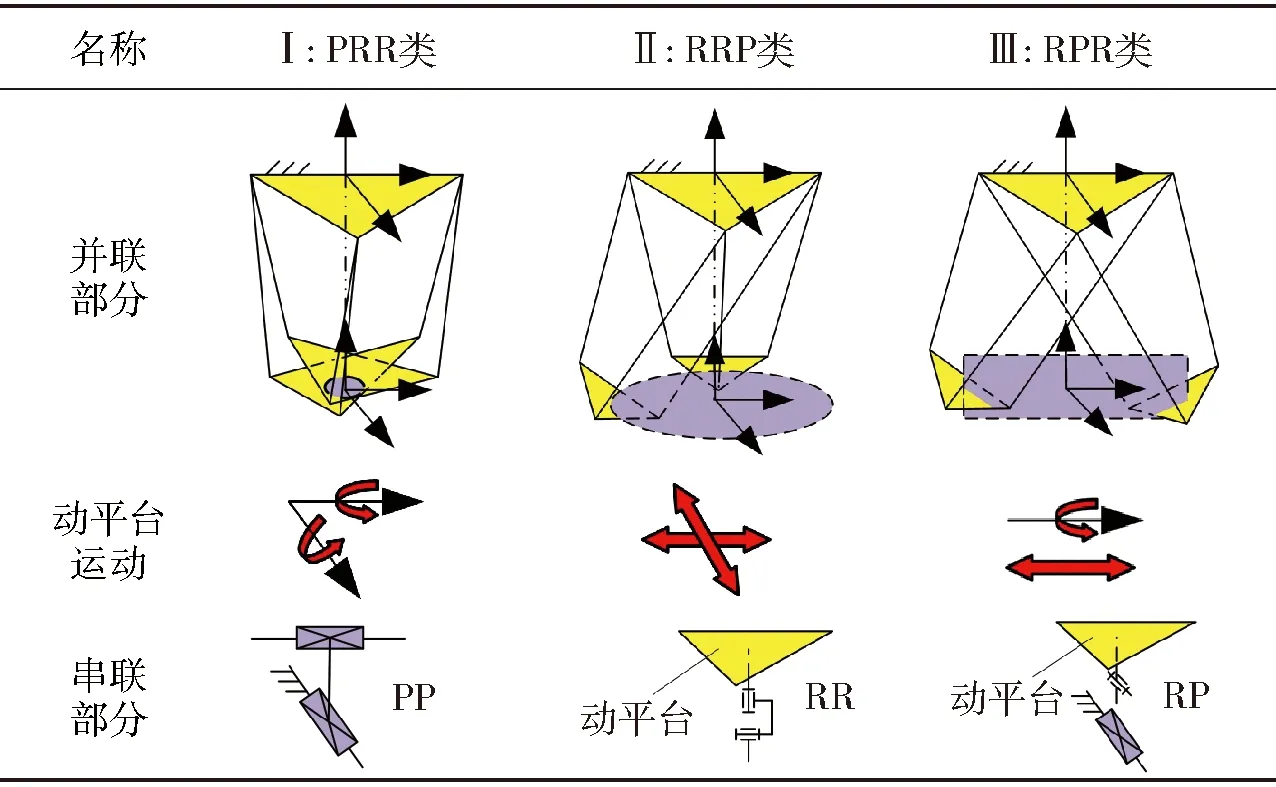
本文所研究的5自由度混联机器人为基于2RPU/UPR并联机构所构造的混联机器人,对应于表1中的Ⅲ型。文献[26]已对2RPU/UPR并联机构进行了详细的机构特征描述。该并联机构存在2条连续转轴,其中1条靠近定平台,另1条靠近动平台。绕靠近动平台转轴的转动可直接用于末端刀具1个方向的方位调整,绕靠近定平台转轴的转动用于实现水平方向的大范围移动,故在动平台上方串接1个轴线与靠近定平台转轴平行的单自由度摇摆头,用于末端刀具另1个方向的方位调整。可移动工作台移动方向与并联机构靠近定平台的转轴平行,用于实现工件的移动,从而形成5轴联动,混联机器人机构简图如图1所示。

图1 5自由度混联机器人构型Fig.1 Configuration of 5-DOF hybrid manipulator
2 并联机构2RPU/UPR速度雅可比矩阵
如图1所示,在并联机构2RPU/UPR的动平台建立连体坐标系oxyz,在定平台上建立参考坐标系OXYZ。A1、A2和A3分别为3条分支与定平台相连的运动副的中心点,a1、a2和a3分别为3条分支与动平台相连的运动副的中心点。动平台和定平台呈等腰三角形,三角形的顶点分别为a2和A2。在参考坐标系中,定平台点O为A1A3的中点,X轴正向为由点O指向点A3,Y轴正向为由点A2指向点O,Z轴可根据右手定则来确定;动坐标系oxyz的建立方法与之相同。分支1和3中R副轴线、分支1和3中U副连接分支的轴线以及分支2中U副连接定平台的轴线均平行于定坐标中的Y轴;分支1和3中U副连接动平台的轴线、分支2中R副轴线以及分支2中U副连接分支的轴线均平行于动坐标系中的x轴。
如图2所示,为求取分支杆驱动速度和动平台之间的速度映射矩阵,设v和w分别是动平台参考点o的线速度和动平台的角速度矢量,分支杆的驱动速度可表示为
vri=vi·ni=(v+w×di)·ni(i=1,2,3)
(1)
其中
ni=(ai-Ai)/lidi=ai-o
式中vi——动平台铰链中心ai点的线速度矢量
ni——沿分支方向的单位矢量
di——动平台参考点o到动平台铰链中心ai点的矢径
li——分支杆长
所以驱动杆的速度可整理成矩阵形式
vr=JmV
(2)

式中vr——驱动杆速度V——动平台广义速度Jm——分支杆驱动速度和动平台参考点o速度之间的速度映射矩阵

图2 分支i驱动速度Fig.2 Driving velocity of limb i
由式(2)可知Jm为3×6型矩阵,为了得到并联机构2RPU/UPR驱动速度和机构独立变量速度之间的3×3型速度雅可比方阵,还需建立动平台和机构独立变量之间的线速度和角速度解耦矩阵[27]。
并联机构2RPU/UPR动平台的姿态变换矩阵T可以看作经过3次变换复合而成的矩阵,先绕定平台Y轴转动θ1,再沿z轴平移λ,最后绕动平台x轴转动θ2,所以T可表示为
(3)
其中c表示余弦函数, s表示正弦函数。
由式(3)可知动平台的位姿是关于机构独立变量(θ1,θ2,z)的函数。根据式(3)中旋转变换矩阵T的物理意义可知:x=λsθ1,z=λcθ1,则可推导出
x=ztanθ1
(4)
(5)
其中
同理,并联机构的角速度可表达为动平台绕变量(θ1,θ2,z)角速度的线性叠加

(6)
(7)
由式(5)~(7)可得
(8)
将式(8)代入式(2),可得并联机构的速度逆解表达式为
vr=JmJnvg=Jovg
(9)
式中Jo——3×3速度雅可比方阵
3 5自由度混联机器人逆动力学
3.1 并联机构2RPU/UPR动力学分析
式(1)中,动平台铰链中心ai点的速度为分支杆沿杆长方向的线速度矢量和分支杆转动形成的切速度矢量的叠加,则可表示为
vi=vrini+wri×lini
(10)
式中wri——分支角速度
用ni叉乘式(10)两端并化简可得
ni×vi=liwri-li(wri·ni)ni
(11)
对于RPU分支来说,分支角速度方向与R副轴线方向重合,即RPU分支角速度方向与分支垂直,故有
wri·ni=0 (i=1,3)
(12)
将式(12)代入式(11)整理可得RPU分支角速度表达式为
(13)
根据文献[25,27]中单位矢量的反对称矩阵的概念及性质,可进一步将式(13)表达为
wri=JwiV(i=1,3)
(14)
其中
将式(13)两端对时间t求导并整理可得分支角加速度表达式为
(15)
式中εri——RPU分支角加速度
对于UPR分支来说,连接定平台的铰链为U副,根据角速度的叠加性可得UPR分支角速度为
(16)
其中
式中Ri1——U副连接定平台转动副轴线的单位矢量
Ri2——U副连接分支杆转动副轴线的单位矢量
式(16)两端同时叉乘lini,并结合式(10)可得

(17)
式(17)两端分别同时点乘Ri2和Ri1可求得UPR分支中构成U副的两转动副的角速度为
(18)
将式(18)代入式(16)并化简可得
wri=JwiV(i=2)
(19)
其中
将式(19)两端对时间t求导并整理可得

(20)
式中εri——UPR分支的角加速度
如图1所示,并联机构2RPU/UPR每条分支杆可分为两部分,将分支与定平台相连部分称为上伸缩杆,将分支与动平台相连的部分称为下伸缩杆。上伸缩杆质心到与定平台连接铰链中心的距离为lcui,下伸缩杆质心到与动平台连接铰链中心的距离为lcli。
设上伸缩杆质心线速度及角速度分别为vcui和wcui,则
(21)
将上述式(14)和式(19)代入式(21),则分支杆上伸缩杆的质心线速度和角速度可表达为
(22)
其中
设上伸缩杆质心线加速度acui,则由式(21)中质心线速度表达式对时间t求导可得
acui=εri×lcuini+lcuiwri×(wri×ni)
(23)
根据上述求解上伸缩杆的质心线速度和角速度的方法,可求得下伸缩杆质心线速度及角速度vcli和wcli为
(24)

设下伸缩杆质心线加速度acli,则由式(24)中质心线速度表达式对时间t求导可得
acli=(li-lcli)εri×ni+(li-lcli)wri×(wri×ni)+
arini+2vri(wri×ni)
(25)
为方便建立混联机器人的动力学模型,先对并联机构2RPU/UPR进行动力学建模。设3条分支中上伸缩杆和下伸缩杆的结构和质量分别相同,mu、ml、mmp分别为上伸缩杆、下伸缩杆、动平台的质量;Gu、Gl、Gmp分别为上伸缩杆、下伸缩杆、动平台的重力;fui、fli、fmp分别为上伸缩杆、下伸缩杆、动平台的惯性力;nui、nli、nmp分别为上伸缩杆、下伸缩杆、动平台的惯性矩,则
(26)
其中
Rui=Rli
式中g——重力加速度,方向沿Z轴正向Iui、Ili、Imp——上伸缩杆、下伸缩杆、动平台相对于质心连体坐标系惯性矩阵
Rui、Rli、Rmp——上伸缩杆、下伸缩杆、动平台连体坐标系相对于基坐标系的姿态矩阵
a、ε——动平台的质心线加速度、角加速度
根据虚功原理可得

(27)
其中
式中Fq——分支杆驱动力Fe——等效加载于动平台质心的外力Te——等效加载于动平台质心的外力矩
将上述式(8)、(9)、(22)和式(24)代入式(27)并整理可得驱动力表示式

(28)
当已知动平台速度、加速度、等效外力及等效外力矩时,可由式(28)求得并联机构驱动分支的驱动力。
3.2 单自由度摆头的动力学分析
由于该5自由度混联机器人的串联部分又分为串联单自由度摆头和移动平台两部分,且移动平台与并联部分和单自由度摆头所组成的4自由度混联部分相独立,所以移动平台的动力学问题简单且对其余结构没有影响。在此仅考虑单自由度摆头的动力学模型。为求得单自由度摆头的驱动力矩,并求得作用在动平台质心的等效外力和外力矩的Fe和Te,需对安装于动平台上的单自由度摆头单独进行受力分析。设单自由度摆头与动平台连接铰链到动平台参考点o的距离为l1,摆头长度为l2,摆头与动平台连接铰链到摆头质心的距离为ls,其受力模型如图3所示。
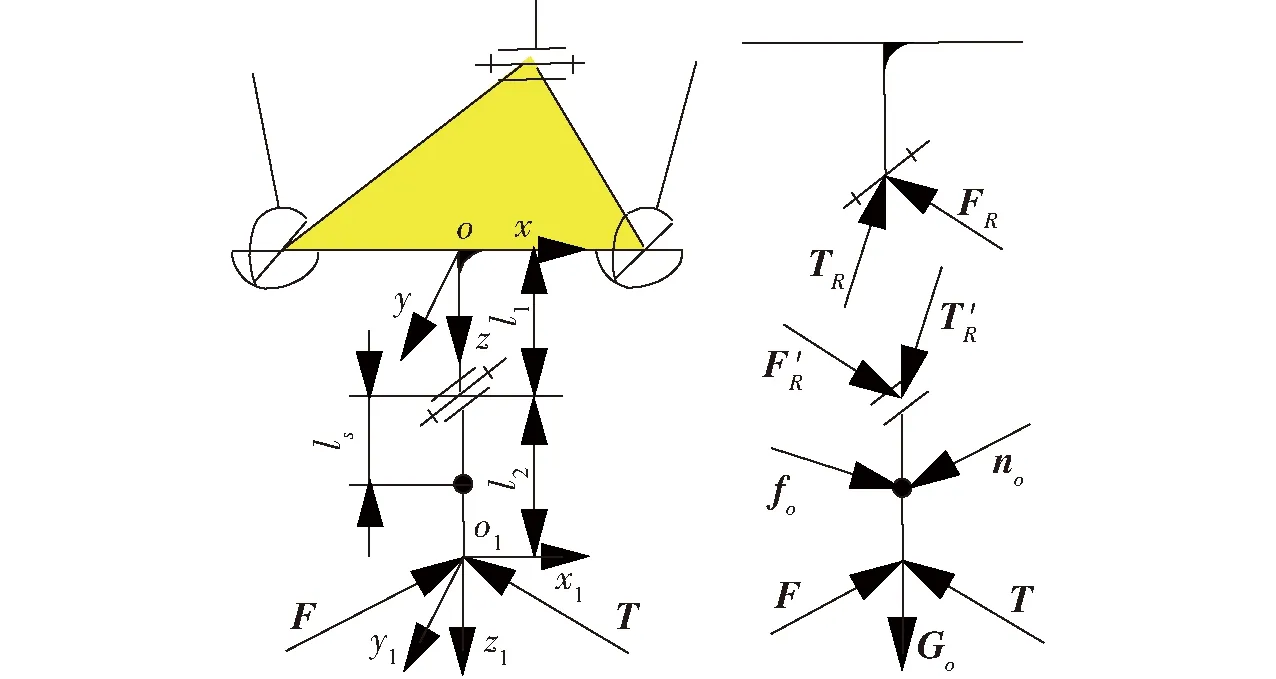
图3 单自由度摆头Fig.3 Tilting head with single DOF
(29)
式中Io——摆头相对质心连体坐标系的惯性矩阵Ro——连体坐标系相对基坐标系姿态矩阵
达朗贝尔原理为物体所受外力、动力及结构反力之和为零的原理,所以可根据达朗贝尔原理建立单自由度摆头的力学平衡方程
(30)

根据力的相互性可知
(31)
由式(31)可得到控制摆头转动电动机的驱动力矩为
(32)
式中TM——摆头转动电动机的驱动力矩
将式(31)中求得的力和力矩向动平台质心o点进行等效,则可求得作用于o点的等效外力和等效外力矩,等效外力Fe和等效外力矩Te可表示为
(33)
其中
将式(33)中的Fe和Te代入式(28),即可求得并联机构2RPU/UPR 3条分支驱动力。
4 数值仿真
混联机器人结构及物理参数见表2。
运用上述理论模型和机构参数,在Matlab中进行编程计算求解,得到驱动力如图4所示,其中Fri为第i分支的驱动力,TM为单自由度摆头的驱动力矩。
为验证理论模型的正确性,采用系统动力学分析软件 ADAMS对机构进行动力学仿真,将建立好的三维模型导入到ADAMS软件中,并添加相关运动副约束,设置5自由度混联机器人的驱动模型,使其与上述规划的运动模型一致,虚拟样机模型如图5所示,仿真结果如图6所示。

表2 结构及物理参数Tab.2 Structural and physical parameters
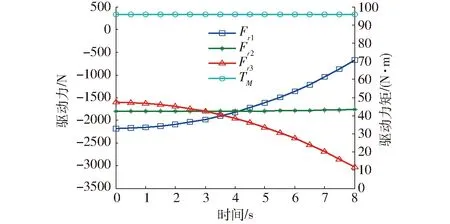
图4 Matlab仿真曲线Fig.4 Simulation curves from Matlab software

图5 结构模型Fig.5 Structural model in ADAMS software
通过对比图4和图6的仿真曲线,可以得出上述5自由度混联模型动力学模型的正确性。
5 结论
(1)根据2R1T并联机构中转轴空间分布性质将该类并联机构分为3种类型:PRR、RRP和RPR;并给出了根据不同类型的2R1T并联机构构造5自由度混联机器人的设计方案。
(2)建立了动平台和机构独立变量之间的线速度和角速度解耦矩阵,并且推导了并联机构2RPU/UPR驱动速度和机构独立变量速度之间的3×3型速度雅可比方阵。
(3)求得了并联机构各分支中上伸缩杆和下伸缩杆质心速度及动平台质心广义速度之间的速度映射矩阵,运用虚功原理建立了并联机构的动力学模型。

图6 ADAMS仿真曲线Fig.6 Simulation curves from ADAMS software
(4)运用达拉贝尔原理对并联机构所串联的单自由度摆头进行受力分析,建立了单自由度摆头和并联机构动平台之间的力学关系,求解了作用于动平台参考点的等效力/力矩。
(5)基于虚功原理和达拉贝尔原理得出了该5自由度混联机器人的动力学模型。运用Matlab和ADAMS仿真软件,对机器人的理论动力学模型进行了仿真,验证了模型的正确性。
1 黄真, 李秦川. 少自由度并联机器人机构的型综合原理[J]. 中国科学:技术科学, 2003,33(9):813-819. HUANG Z, LI Q C. Type synthesis of lower mobility parallel robots[J]. Science in China:Series E, 2003,33(9):813-819. (in Chinese)
2 FAN C, LIU H, ZHANG Y. Type synthesis of 2T2R, 1T2R and 2R parallel mechanisms[J]. Mechanism and Machine Theory, 2013, 61: 184-190.
3 WANG F, CHEN Q, LI Q. Optimal design of a 2-UPR-RPU parallel manipulator[J]. Journal of Mechanical Design, 2015, 137(5): 054501.
4 XU Y D, ZHANG D S, YAO J T, et al. Type synthesis of the 2R1T parallel mechanism with two continuous rotational axes and study on the principle of its motion decoupling[J]. Mechanism and Machine Theory, 2017, 108: 27-40.
5 GUO W J, LI R F, CAO C Q, et al. Kinematics analysis of a novel 5-DOF hybrid manipulator[J]. International Journal of Automation Technology, 2015, 9(6): 765-774.
6 ZHOU H, QIN Y, CHEN H, et al. Structural synthesis of five-degree-of-freedom hybrid kinematics mechanism[J]. Journal of Engineering Design, 2016, 27(4-6): 390-412.
7 李彬, 黄田, 张利敏,等. 一种新型五自由度混联机械手的概念设计及尺度综合[J]. 中国机械工程, 2011, 22(16):1900-1905. LI B, HUANG T, ZHANG L M, et al. Conceptual design and dimensional synthesis of a novel 5-DOF hybrid manipulator[J]. China Mechanical Engineering, 2011, 22(16):1900-1905. (in Chinese)
8 PALPACELLI M, PALMIERI G, CARBONARI L, et al. Experimental identification of the static model of the HPKM Tricept industrial robot[J]. Advanced Robotics, 2014, 28(19): 1291-1304.
9 OLAZAGOITIA J L, SL P, WYATT S. New PKM Tricept T9000 and its application to flexible manufacturing at aerospace industry[C]. SAE Papers 2007-01-3820, 2007.
10 BI Z M, JIN Y. Kinematic modeling of Exechon parallel kinematic machine[J]. Robotics and Computer-Integrated Manufacturing, 2011, 27(1): 186-193.
11 ZHANG J, ZHAO Y, JIN Y. Kinetostatic-model-based stiffness analysis of Exechon PKM[J]. Robotics and Computer-Integrated Manufacturing, 2016, 37: 208-220.
13 LIU H T, HUANG T, ZHAO X M, et al. Optimal design of the Trivariant robot to achieve a nearly axial symmetry of kinematic performance[J]. Mechanism and Machine Theory, 2007, 42(12): 1643-1652.
14 沈惠平, 赵海彬, 邓嘉鸣,等. 基于自由度分配和方位特征集的混联机器人机型设计方法及应用[J]. 机械工程学报, 2011, 47(23):56-64. SHEN H P, ZHAO H B, DENG J M, et al. Type design method and the application for hybrid robot based on freedom distribution and position and orientation characteristic set[J]. Journal of Mechanical Engineering, 2011, 47(23): 56-64. (in Chinese)
15 曹毅, 秦友蕾, 陈海,等. 基于GF集理论的五自由度混联机器人构型综合[J/OL]. 农业机械学报, 2015, 46(11):392-398. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20151153&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.11.053. CAO Y, QIN Y L, CHEN H, et al. Structural synthesis of 5-DOF hybrid mechanisms based on GF set[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(11):392-398. (in Chinese)
16 ZENG Q, FANG Y. Structural synthesis and analysis of serial-parallel hybrid mechanisms with spatial multi-loop kinematic chains[J]. Mechanism and Machine Theory, 2012, 49: 198-215.
17 TANEV T K. Kinematics of a hybrid (parallel-serial) robot manipulator[J]. Mechanism and Machine Theory, 2000, 35(9): 1183-1196.
18 STAICU S. Dynamics modelling of a Stewart-based hybrid parallel robot[J]. Advanced Robotics, 2015, 29(14): 929-938.
19 陈修龙, 孙德才, 王清. 基于拉格朗日的冗余驱动并联机构刚体动力学建模[J/OL]. 农业机械学报, 2015, 46(12):329-336. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20151245&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.12.045. CHEN X L, SUN D C, WANG Q. Rigid dynamics modeling of redundant actuation parallel mechanism based on Lagrange method[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(12):329-336. (in Chinese)
20 ZHANG X, ZHANG X, CHEN Z. Dynamic analysis of a 3-RRR parallel mechanism with multiple clearance joints[J]. Mechanism and Machine Theory, 2014, 78: 105-115.
21 LIU W, GONG Z, WANG Q. Investigation on Kane dynamic equations based on screw theory for open-chain manipulators[J]. Applied Mathematics and Mechanics, 2005, 26(5): 627-635.
22 CHENG G, SHAN X. Dynamics analysis of a parallel hip joint simulator with four degree of freedoms (3R1T)[J]. Nonlinear Dynamics, 2012, 70(4): 2475-2486.
23 姜峣, 李铁民, 王立平. 过约束并联机构动力学建模方法[J]. 机械工程学报, 2013, 49(17):123-129. JIANG Y, LI T M, WANG L P. Research on the dynamic model of an over-constrained parallel mechanism[J]. Journal of Mechanical Engineering, 2013, 49(17):123-129. (in Chinese)
24 WU J, WANG J, YOU Z. A comparison study on the dynamics of planar 3-DOF 4-RRR, 3-RRR and 2-RRR parallel manipulators[J]. Robotics and Computer-integrated Manufacturing, 2011, 27(1): 150-156.
25 王书森, 梅瑛, 李瑞琴. 新型3T2R龙门式混联机床动力学模型[J]. 机械工程学报, 2016, 52(15):81-90. WANG S S, MEI Y, LI R Q. Solving dynamics for a novel 3T2R gantry hybrid machine tool[J]. Journal of Mechanical Engineering, 2016, 52(15):81-90. (in Chinese)
26 张东胜, 许允斗, 姚建涛,等. 2RPU/UPR并联机构自由度和位置分析[J]. 机械设计与制造, 2014(12):53-56. ZHANG D S, XU Y D, YAO J T, et al. Position and DOF analysis of 2RPU/UPR parallel mechanism[J]. Machinery Design & Manufacture,2014(12):53-56. (in Chinese)
27 HU B, CUI H, LI B. Design and kinematics analysis of a novel serial-parallel kinematic machine[J]. Proc. IMech E, Part C: Journal of Mechanical Engineering Science, 2016, 230(18): 3331-3346.
InverseDynamicAnalysisofNovel5-DOFHybridManipulator
ZHANG Dongsheng1XU Yundou1,2YAO Jiantao1,2ZHAO Yongsheng1,2
(1.ParallelRobotandMechatronicSystemLaboratoryofHebeiProvince,YanshanUniversity,Qinhuangdao066004,China2.KeyLaboratoryofAdvancedForging&StampingTechnologyandScience,MinistryofEducation,YanshanUniversity,Qinhuangdao066004,China)
A novel 5-degree-of-freedom (5-DOF) hybrid serial-parallel manipulator was proposed, the 2RPU/UPR parallel mechanism (PM) was the parallel part of this manipulator; and it was a kind of parallel mechanism with two continuous rotational axes, which had one translational DOF and two rotational DOFs (2R1T). The kinematics of this manipulator with high degree of modularity was quite simple, which made it easy to implement trajectory planning, parameter calibration and motion control. Firstly, to establish the inverse dynamic model of this 5-DOF hybrid manipulator, the 3×3 velocity Jacobian square matrix, between the moving platform and the independence movement parameters, was obtained. Secondly, the centroid velocity mapping matrix from the moving platform to each limb was established. Especially, the kinematics models of the UPR and RPU limbs were gotten. And the dynamic model of the 2RPU/UPR PM was obtained by use of the virtual work principle. Thirdly, the force analysis of the tilting head with single DOF was finished by means of D’ Alembert principle. Then, the inverse dynamic model of the 5-DOF hybrid manipulator was solved by combining the virtual work principle and the D’ Alembert principle. At last, the dynamic numerical simulations were performed through Matlab software and ADAMS software, the results showed that the dynamic model of this 5-DOF hybrid manipulator was correct, which provided a new idea for establishing the dynamic model of this type hybrid manipulator.
hybrid robot; parallel mechanism; dynamic model; virtual work principle; D’ Alembert principle
TP242
A
1000-1298(2017)09-0384-08
10.6041/j.issn.1000-1298.2017.09.049
2017-01-04
2017-02-06
国家自然科学基金项目(51405425)、河北省重点基础研究项目(15961805D)和河北省自然科学基金项目(E2017203387)
张东胜(1988—),男,博士生,主要从事并联机器人理论及其应用研究,E-mail: ysuzds@163.com
赵永生(1962—),男,教授,博士生导师,主要从事并联机器人理论及其应用研究,E-mail: yszhao@ysu.edu.cn
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
湖南电力(2022年3期)2022-07-07
北京航空航天大学学报(2021年4期)2021-11-24
科学大众·教师版(2021年9期)2021-09-05
制造技术与机床(2019年7期)2019-07-22
中国惯性技术学报(2019年6期)2019-03-04
电子制作(2018年17期)2018-09-28
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21