
基于自抗扰控制器和坐标变换的BSRM转子不平衡振动补偿控制
2017-10-12 09:25李雪林孙玉坤陈佳驹
现代电子技术 2017年19期
李雪林+孙玉坤+陈佳驹
摘 要: 磁悬浮开关磁阻电机(BSRM)在运行时由于转子的不平衡振动会使系统的稳定性和安全性受到严重影响,在介绍了BSRM转子悬浮力产生原理的基础上,推导出转子的动力学方程。给出BSRM悬浮力解耦控制模型,利用自抗扰控制器中TD滤波器优越的低通滤波特性,基于坐标变换的思想,设计了BSRM转子的不平衡振动补偿策略,对BSRM转子的不平衡振动进行实时动态补偿。仿真结果验证了该策略的有效性,设计的基于自抗扰控制器和坐标变换的方法成功实现了对BSRM转子不平衡振动的补偿,而且基本消除了转子的不平衡振动对BSRM系统的影响,控制系统性能优良。
关键词: 磁悬浮开关磁阻电机; 自抗扰控制器; 坐标变化; 不平衡振动补偿
中图分类号: TN876?34 文献标识码: A 文章编号: 1004?373X(2017)19?0145?05
BSRM rotor unbalance vibration compensation control based on active
disturbance rejection controller and coordinate transformation
LI Xuelin1, 2, SUN Yukun2, CHEN Jiaju2
(1. Jiangsu institute of tourism and hospitality, Jiangsu Union Technical Institute, Yangzhou 225001, China;
2. School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China)
Abstract: The bearingless switched reluctance motor (BSRM) while operating may affect its system stability and security seriously due to the rotor unbalance vibration. The suspension force generation principle of the BSRM rotor is introduced to deduce the kinetic equation of the rotor. According to the suspension force decoupling control model of BSRM, superior lowpass filtering characteristic of the tracking differentiator (TD) in active disturbance rejection controller and the thought of coordinate transformation, the unbalanced vibration compensation strategy of BSRM rotor is designed to perform the real?time dynamic compensation for the unbalance vibration of BSRM rotor. The simulation results verify that the strategy is effective. The method based on active disturbance rejection controller and coordinate transformation can compensate the unbalance vibration of the BSRM rotor successfully, and almost eliminate the influence of the rotor unbalance vibration on the BSRM system. The control system has excellent performance.
Keywords: bearingless switched reluctance motor; active disturbance rejection controller; coordinate transformation; unba?lance vibration compensation
0 引 言
磁悬浮开关磁阻电机(BSRM) (有文献称无轴承开关磁阻电机)分析比较了磁轴承结构与SR电机定子结构的相似性,是将两者的优点融合后发展起来的。BSRM是将对电机转子产生悬浮力的绕组和电机的定子绕组集成在一起,使电机定子绕组磁场和电机悬浮力绕组磁场融合成一个整体,通过研究BSRM的转矩力和径向悬浮力的耦合状况与解耦控制,实现独立控制BSRM转子的正常旋转和稳定悬浮[1?5]。BSRM因为其转子没有绕组,在极速环境下运行电机不会变形,容错能力强,在电子工业、化工工业、生命科学等领域有广泛的应用前景。
但是实践表明,在BSRM高速旋转过程中由于电机转子自身机械加工的缺陷,转子无法避免偏心现象,所以转子在高速旋转时会出现特有的不平衡振动,而不平衡振动严重影响了转子的旋转精度。因此,对BSRM悬浮转子不平衡振动的补偿研究是一个非常重要的课题。
目前,对不平衡振动的补偿研究主要集中在通过增加或者减少转子的刚度和阻尼这两种方式来控制转子的不平衡振动[6?7],增加转子的刚度和阻尼可以减少和消除转子的不平衡振动位移,减少转子的刚度和阻尼则可以减少和消除转子的不平衡振动力。
本文利用自抗扰控制器中的TD滤波器(Tracking Differentiator,TD)和坐标变换的方法对磁悬浮开关磁阻电机转子不平衡振动进行补偿,通过坐标变换将交流变化的位移信号转换为直流信号,充分应用TD滤波器优越的低通滤波特性来消除包含在直流信号中的高频噪声[8?9] ,再经过坐标反变换得到不平衡振动补偿信号。将位移信号与得到的BSRM不平衡振动补偿信号进行叠加,成功地把振动信号从位移信号中消除,从而成功达到减小甚至消除BSRM转子的不平衡振动的目的, 仿真结果证明设计的补偿控制策略是有效可行的。
1 旋转体振动产生的原因
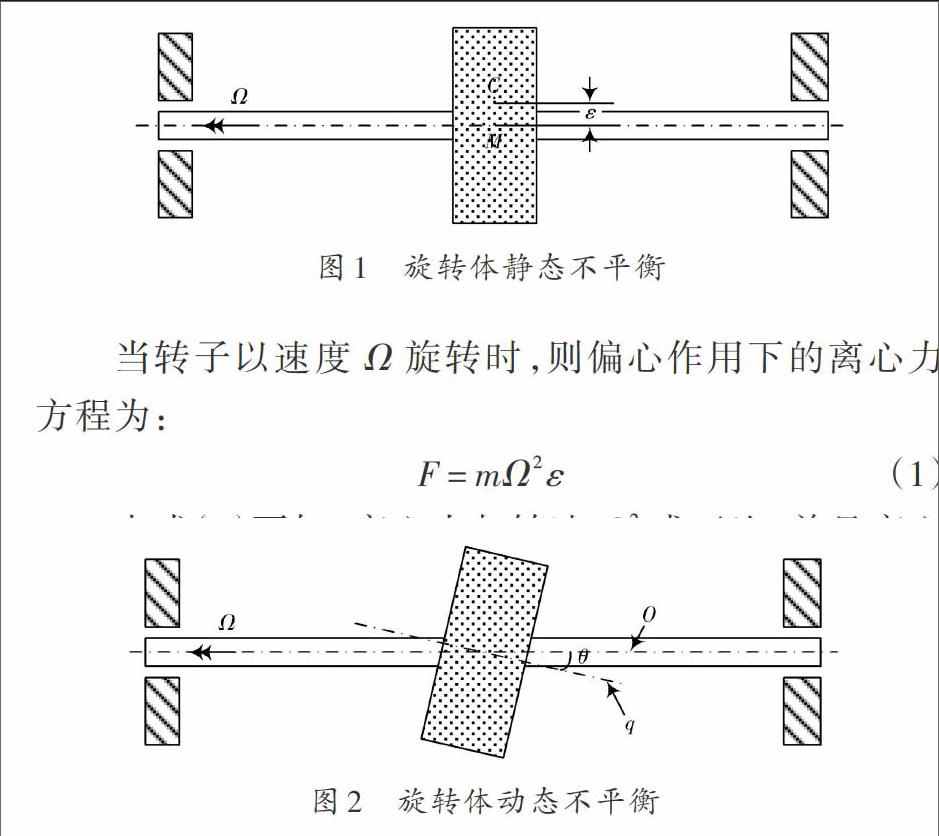
任何一个旋转体,总会产生不平衡振动[8]。一般情况下旋转体不平衡可以划分为旋转体静态不平衡和旋转体动态不平衡两种。
旋转体静态不平衡产生的主要原因是由于质量偏心。
在图1中,设定[C]为转子的质量中心,设定[M]既是转子的转轴轴心又是转子的几何中心,设定[ε]是由转子的质量中心和几何中心不重合产生的偏心距。
当转子以速度[Ω]旋转时,则偏心作用下的离心力方程为:
[F=mΩ2ε] (1)
由式(1)可知,离心力与转速[Ω2]成正比,并且离心力会传递到机座上造成BSRM悬浮系统的振动。
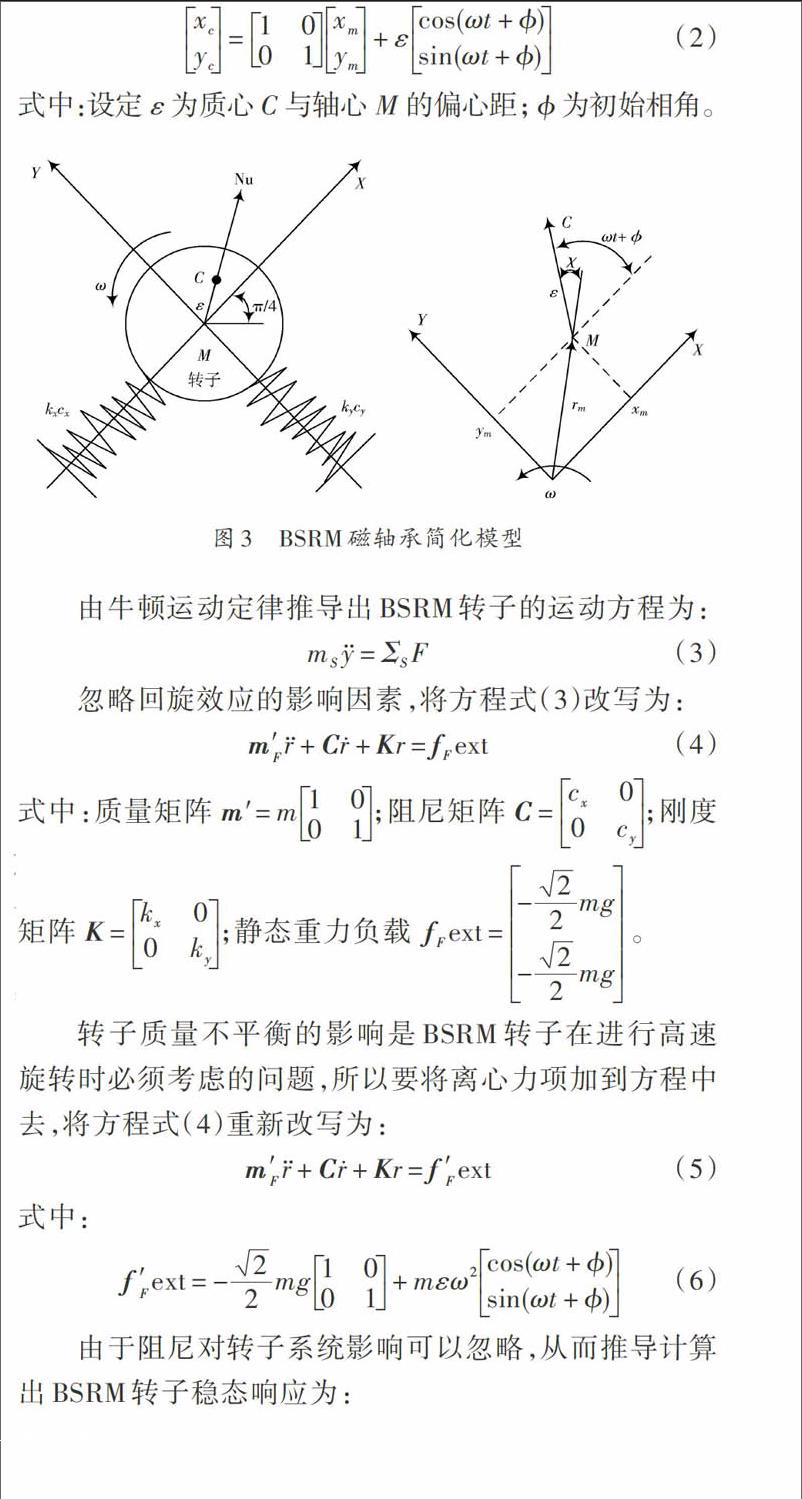
当转子的惯性轴[q]在同一直线上与其旋转轴[O]未能对齐时,两轴之间会形成角度差[θ,]旋转体高速旋转时会产生动态不平衡,从而必定会产生振动。
图2 旋转体动态不平衡
正是不平衡的存在,任何物体在高速旋转时一定会产生振动。对于本文所研究的磁悬浮开关磁阻电机转子系统,转子的刚度非常强,而且转子的两端安装有轴承的保护装置。因此,BSRM转子的不平衡振动主要是因为静态不平衡产生的。并且,当转子转速增加时这种不平衡振动会越来越强烈。一旦振动超出转子系统能够承受的范围,这种振动就会使BSRM系统的动态特性和稳定运行受到严重的损害。因此,不平衡振动的破壞对于高速旋转体的稳定运行有着不可忽略的危害。
2 BSRM转子动力学方程
在对BSRM转子的不平衡振动进行补偿控制之前,首先要对BSRM转子运动轨迹进行动态分析,如图3所示是对BSRM转子进行一定简化之后的模型,设定BSRM转子以速度[ω]进行旋转时,由于存在质量偏心的影响,转子的几何中心[M]和质心[C]不在一个点上,所以在坐标系[XOY]中,质心坐标为:
[xcyc=1001xmym+εcos(ωt+?)sin(ωt+?)] (2)
式中:设定[ε]为质心[C]与轴心[M]的偏心距;[?]为初始相角。
由牛顿运动定律推导出BSRM转子的运动方程为:
[mSy=ΣSF] (3)
忽略回旋效应的影响因素,将方程式(3)改写为:
[m′Fr+Cr+Kr=fFext] (4)
式中:质量矩阵[m=m1001;]阻尼矩阵[C=cx00cy;]刚度矩阵[K=kx00ky;]静态重力负载[fFext=-22mg-22mg]。
转子质量不平衡的影响是BSRM转子在进行高速旋转时必须考虑的问题,所以要将离心力项加到方程中去,将方程式(4)重新改写为:
[m′Fr+Cr+Kr=f′Fext] (5)
式中:
[f′Fext=-22mg1001+mεω2cos(ωt+?)sin(ωt+?)] (6)
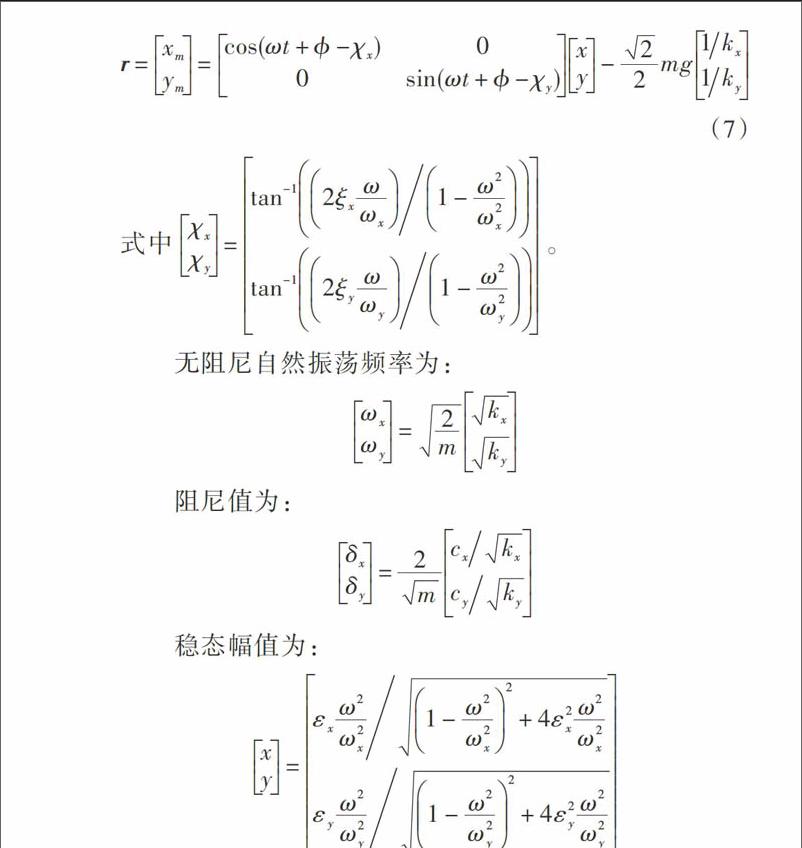
由于阻尼对转子系统影响可以忽略,从而推导计算出BSRM转子稳态响应为:
[r=xmym=cos(ωt+?-χx)00sin(ωt+?-χy)xy-22mg1kx1ky] (7)
式中[χxχy=tan-12ξxωωx1-ω2ω2xtan-12ξyωωy1-ω2ω2y]。
无阻尼自然振荡频率为:
[ωxωy=2mkxky]
阻尼值为:
[δxδy=2mcxkxcyky]
稳态幅值为:
[xy=εxω2ω2x1-ω2ω2x2+4ε2xω2ω2xεyω2ω2y1-ω2ω2y2+4ε2yω2ω2y]
通过方程式(7)可以看出,在没有质量偏心的条件下,BSRM转子几何中心的动态旋转轨迹应该为一个点;但BSRM转子在质量偏心产生离心力的影响下,BSRM转子几何中心的动态旋转轨迹为椭圆。通常可以近似认为BSRM转子的刚度在[x]轴和[y]轴方向相等,令[kx=ky,]BSRM转子的动态旋转轨迹为圆。
3 基于自抗扰控制器和坐标变换的不平衡振动
补偿
3.1 TD滤波器
TD滤波器(Tracking Differentiator,TD)非线性过程分析比较特殊,难以用常规的非线性频率分析方法研究。不过,一旦将TD滤波器的跟踪参数给定之后,即使输入信号频率非常高,其跟踪波形也可以被视为一个正弦波,并且频率与输入信号相同。因此在对TD滤波器的频率特性分析中引入线性系统频率特性分析方法,不会出现较大的误差。
TD滤波器方程:
[vα1=vα2vα2=-Rsat(A,δ1)] (8)
式中:[A=vα1-x*α+vα2vα22R;][sat(A,δ1)=sign(A), A≥δ1Aδ1, A<δ1]。
文献[10?11]对式(8)二阶的频率特性进行了详细分析,结果表明二阶TD滤波器和二阶线性低通滤波器特性相似,但远远优于一般线性系统,并且在通带内有较小相移时,无谐振现象产生。
3.2 不平衡振动补偿控制
图4为转子质量偏心平面直角坐标示意图,对位移信号设定如下:在旋转坐标系中,[x]方向为[ξm,][y]方向为[ζm;]在静止坐标系中,[x]方向为[xm,][y]方向为[ym,]由两个坐标系间的关系可得:
[ξmζm=cosωtsinωt-sinωtcosωtxmym=Txmym] (9)
[ξm=rmcos(?-χ)]
[ζm=rmsin(?-χ)]
图4 转子偏心平面直角坐标示意图
因为转子的振动频率与转子的转速都为[ω,]可以推断位移传感器采集到的位移信号中肯定含有与转速[ω]同频的信号分量,将同步振动信号[xm,ym]利用快速傅里叶变换提取出来。 利用坐标变换将位移信号交流值转换为直流值,则一些高频噪声信号必然包含在该直流值中。TD滤波器采用式(8)所示算法,具有良好的低通滤波功能,能够在把高频噪声过滤的同时,顺利通过坐标变换得到直流信号。接着,再次利用坐标反变换的方法,可以得到BSRM转子的不平衡振动补偿信号。将位移信号与得到的BSRM不平衡振动补偿信号进行叠加,成功把振动信号从位移信号中消除,从而达到减小甚至消除转子不平衡振动的目的。图5为BSRM转子振动补偿控制框图。
4 系统仿真试验
以实验样机作为仿真对象,利用Matlab中Simulink和模糊逻辑工具箱进行BSRM转子不平衡补偿控制的仿真试验。
4.1 位移信号仿真试验
在仿真软件Matlab里将振动信号用正弦波来模拟,然后将随机产生的噪声信号叠加在该正弦波上,可以得到仿真用的位移信号,如图6所示。并且根据实验需要可以对频率进行动态调节。设定频率[f=]250 Hz,即[Ω=]15 000 rad/min,[x]方向的位移信号比[y]方向的位移信号落后90°。
4.4 坐标反变换
从图8中可以看出,在TD滤波器滤波后,直流信号由原来波动明显的信号变为了平滑的信号。利用坐标反变换将直流信号重新变换为交流信号,那么此交流信号实际是从位移信号中分离出来的振动信号,其频率与转速相等,将此信号值作为BSRM不平衡振动的补偿信号取反后再叠加到位移信号中。用式(8)进行坐标反变换,得到的仿真结果如图9所示。
将图9与图6进行分析比较发现,图9中的信号成功跟踪上了位移信号,并且与位移信号同频同幅,波形平滑。此信号与转速同频也就是BSRM不平衡振动的补偿信号。
4.5 振动补偿效果仿真
将位移信号与得到的BSRM不平衡振动补偿信号进行叠加,振动信号被成功消除,位移信号中不再含有振动信号,其仿真结果如图10所示。
由仿真结果可以看出,加入了补偿信号后的位移信号的振动非常微小(小于1 μm),可见,基于TD滤波器和坐标变换振动补偿策略较好地实现了BSRM转子不平衡振动的补偿控制。
5 结 语
本文利用自抗扰控制器中TD滤波器良好的低通滤波特性,采用坐标变化的思路,设计了BSRM转子的不平衡振动补偿策略,仿真结果证明了设计补偿控制策略是有效可行的。
参考文献
[1] 陈佳驹,成秋良,潘伟,等.无轴承电机轴向混合磁轴承自抗扰控制[J].电机与控制学报,2008,12(4):365?369.
[2] ZHU H Q, CHEN J J, SUN X D. Active disturbances rejection decoupling control for active magnetic bearing multivariable system [C]// Proceedings of 2008 International Conference on Modeling, Identification and Control. Shanghai, China: IEEE, 2008: 1?7.
[3] TAKEMOTO M, CHIBA A, FUKAO T, et al. A new control method of bearingless switched reluctance motors using square?wave currents [C]// Proceedings of 2000 IEEE Power Engineering Society Winter Meeting. [S.l.]: IEEE, 2000: 375?380.
[4] 李雪林,孙玉坤.磁悬浮开关磁阻电机模糊补偿逆系统解耦控制[J].电机与控制应用,2009(5):16?20.
[5] TAKEMOTO M, CHIBA A, FUKAO T. A feed?forward compensator for vibration reduction considering magnetic attraction force in bearingless switched reluctance motors [C]// Proceedings of the 7th International Symposium on Magnetic Bearings. [S.l.]: IEEE, 2000: 395?400.
[6] 刘国海,孙玉坤,张浩,等.基于神经网络逆系统的磁悬浮开关磁阻电动机的解耦控制[J].电工技术学报,2005,20(9):39?43.
[7] 李雪林,孙玉坤.磁悬浮开关磁阻电机悬浮系统自抗扰逆系统解耦控制[J].微特电机,2015,43(5):53?56.
[8] 陈佳驹.交流混合磁轴承自抗扰解耦控制及振动补偿[D].镇江:江苏大学,2009.
[9] 朱熀秋.数控磁轴承的研究与实现[D].南京:南京航空航天大学,2000.
[10] 韩京清,黄远灿.二阶跟踪?微分器的频率特性[J].数学的实践与认识,2003,33(3):71?74.
[11] 黄一,张文革.自抗扰控制器的发展[J].控制理论与应用,2002,19(4):485?492.
