基于矢量控制的纯电动汽车电机控制器的研制
2017-10-19 11:35李学华王世伟
电气自动化 2017年4期
李学华, 王世伟
(青岛云路新能源科技有限公司,山东 青岛 266000)
基于矢量控制的纯电动汽车电机控制器的研制
李学华, 王世伟
(青岛云路新能源科技有限公司,山东 青岛 266000)
设计了针对纯电动汽车开发的一款5kW电机控制器。硬件设计上采用低电压、大电流的MOSFET并联技术,以高性价比的ARM核CPU为主控单元;软件设计上以高性能的电流矢量控制来实现对交流异步电机的精准控制,并加入整车控制逻辑;具有成本低、工艺简单、可靠性高、可以实现批量生产的特点。目前通过实验充分验证了其实用性和可靠性,并已实现批量生产。
纯电动汽车;电机控制器;MOSFET;矢量控制;交流异步电机
0 引 言
随着全球能源危机的临近和人们环境保护意识的提升,大家越来越意识到开发一种新能源汽车来代替传统的燃油汽车已经迫在眉睫。在各国政府的大力倡导和补贴下,纯电动汽车已经成为大家的首要选择。作为电动汽车动力系统三大件之一的电机控制器,犹如整车的心脏,它的性能和成本直接影响整车的性价比,在电动汽车的发展上尤为重要。本设计以高性能的16位CPU为控制核心,采用异步电机矢量控制算法和先进的整车逻辑,研发出了一款优异的电动汽车控制器[1],该控制器目前已经装车实验并实现量产。
1 系统硬件设计方案
本设计的所有关键部件都是由Infineon公司生产的,保证了控制器运行的可靠性。CPU采用16位XC2768X,功率MOSFET采用IPP045N10N3G,驱动芯片采用irs2127。整个控制系统主要包括控制电路、功率电路、检测电路、驱动电路、开关电源电路等[2],如图1所示。

图1 硬件系统框图
1.1 控制电路
控制器使用16位 XC2768X作为主控CPU,它的主频可以达到128 MHz,片上资源丰富,集成了适合电机控制的带死区编程的PWM模块、2路适合整车控制的CAN通道、16路AD通道以及自动检测转速的QEP模块,非常适合电动汽车控制应用。此控制器可以检测油门和刹车信号,输入到AD口处理后转换成相应的力矩电流进行加减速控制;内置EEPROM来存储相应的用户数据;兼容CAN通讯协议,可以扩展类似仪表盘之类的整车配件;具备丰富的保护功能,例如过温、过流、过压、欠压、失速、短路等。
1.2 功率电路
功率电路的主要作用是按照矢量控制算法将直流电压转换为具有所需频率的交流电压,给交流异步电动机提供电能。本设计中功率电路采用的是由六路MOSFET功率管组成的三相全桥逆变电路,每一相如图2所示,总共需要36只功率管,功率板全部表贴到单层铝基板上,然后铝基板充分贴合到散热器上,此种方式代替了之前的功率模块,成本优势明显。为了保持MOSFET动作一致性,选用同一厂家同一批次的功率管非常有必要,并且在门极驱动信号加入适当的阻容延时,保证到达每一个功率管的驱动信号时间一致。此控制器最大电流350 A,选用6只IPP045N10N3G并联, 最大电流能够达到600 A,设计余量较大。

图2 单相MOSFET电路
1.3 检测电路
检测电路主要包括油门、刹车踏板检测、电流检测、转速检测、电压检测、温度检测等。油门和刹车踏板采用柯蒂斯生产的FP-6型踏板,通过霍尔把踏板深度转换为0~5 V的电压信号,经过滤波和电平转换输入到CPU中。由于电机是三相对称绕组,电流只需要检测两相即可计算第三相,每一相都采用霍尼韦尔生产的线性霍尔,把集磁环中电流对应的磁场信号转变成0~5 V电压信号,经过滤波和整形处理后送入AD口。电机内置光电编码器,检测A、B两相脉冲可以计算出电机转速和方向。
1.4 驱动电路
驱动电路是控制电路和功率电路的桥梁,主要作用是把CPU发出的低电平PWM放大到能够驱动MOSFET的高电平等级,从而驱动交流异步电机工作,如图3所示。本设计中使用的驱动芯片是irs2127,它的Io+只有200 mA,后级需要加推挽来提升到1 A才能驱动六个功率管。它还具有保护功能,当控制器外部短路时,MOSFET的Vds随着电流迅速升高,同时驱动芯片CS管脚电压也随之升高,当升高到一定数值时,该芯片会迅速关断OUT端口,起到及时保护MOSFET的功能,此保护时间可以通过调整RC来随意设置。

图3 PWM驱动电路图
1.5 开关电源电路
本设计中需要的电压有+60 V 、+12 V、 +5 V 、+3.3 V等几种直流电压。其中+60 V由电动汽车的蓄电池提供;+12 V为驱动电路提供电源;+5 V 为数字电路提供电源;+3.3 V则为ARM芯片提供电源。如图4所示为整个系统的电源电路,其驱动芯片为TI公司生产的TPS40210DGQ,该芯片具有以下优点:稳压性能好、电路结构简单、电压调节范围宽、价格低廉,是目前应用较为广泛的汽车级电源芯片之一。所有电压通过单点接地的形式共地,提高电源系统的抗干扰能力。
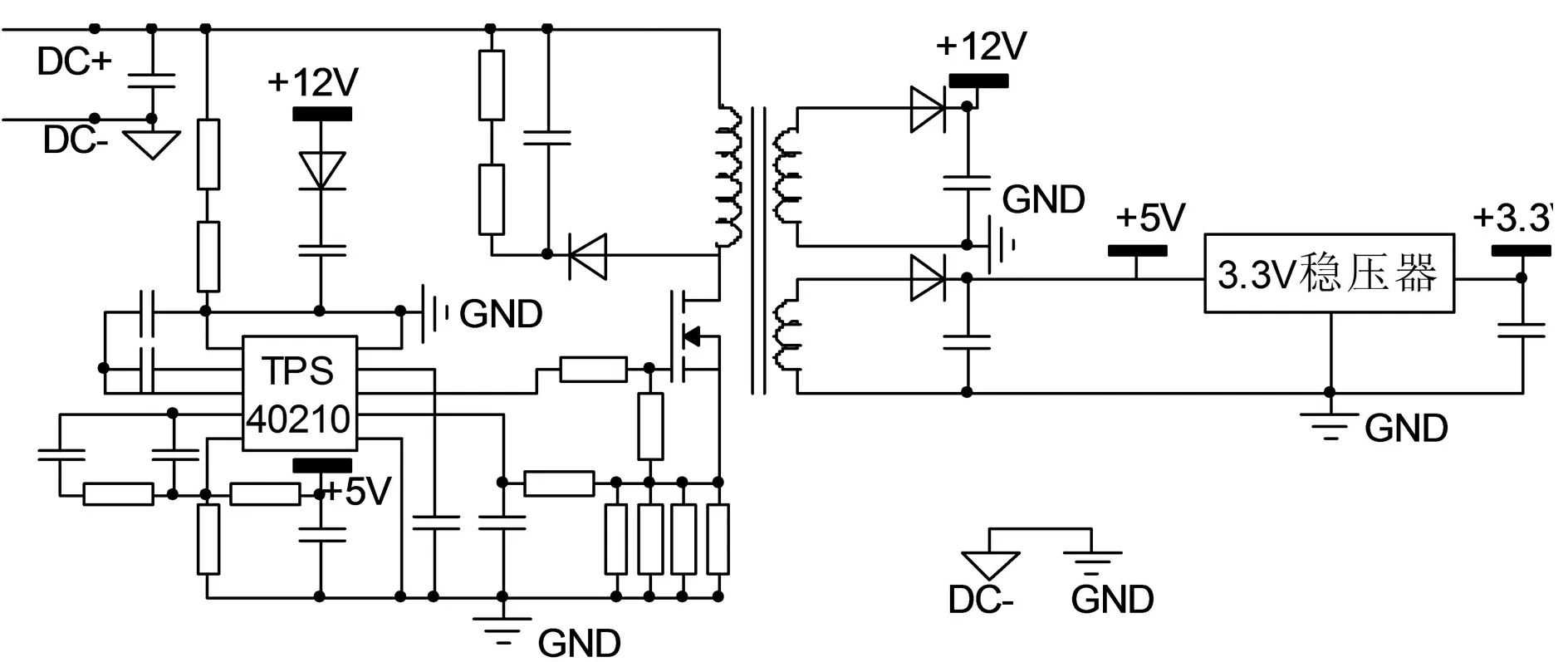
图4 开关电源电路图
2 系统软件设计方案
2.1 异步电机矢量控制算法
矢量控制原理是利用坐标变换,将异步电机定子电流矢量分解成两个相互垂直的分量[3],其中一个分量为励磁电流分量相当于直流电动机的磁场电流,另外一个分量为转矩电流分量相当于电机的电枢电流,对这两个独立的电流分量同时控制幅值和相位就控制定子电流矢量,从而可以使交流异步电机的控制与直流电机调速系统的动、静态性能相同,如图5所示。

图5 矢量控制方框图
2.2 整体方案
整个软件系统主要包括主循环和中断两种模式。主循环中处理的内容包括:寄存器的初始化、变量初始化等。中断模式处理的是:油门和转速等信号的采样转换、矢量控制计算等。主循环结构如图6所示。

图6 主程序系统图
2.3 油门踏板信号的采集和处理
矢量控制中油门踏板的开度标定的是力矩电流大小,当它大于实际采集的力矩电流时,通过PI比例积分调节,输出占空比就不断提高,力矩增大,车速提高;当它小于力矩电流时,通过PI调节,输出占空比就不断下降,力矩减小,车速减慢[4]。实际的力矩电流是通过坐标变换得来的,它的输入量是电机的相电流和转速。比例系数和积分系数与车速高低有关,当接近目标车速时,积分系数调整的较小,减小超调的发生,如图7所示。

图7 油门踏板控制示意图
3 实验结果与分析
3.1 台架测试
此控制器利用对拖测功机对5 kW交流异步电机进行测试,数据如图8所示,最高转速能到4 300 r/min,转速相应快,图9所示为油门100%开度时所测的功率、效率、扭矩等各项数据, 可以看到峰值功率能够达到7.3 kW,电机控制器整体效率超过80%,最大力矩超过64 N·m。

图8 加速曲线

图9 测功机绘制的曲线
3.2 实车测试
此控制器装入总重1吨左右的电动汽车,通过路试可以看到前进加速时电流波形如图10所示,电流过度平滑,整车加速性能优异,0~50 km/h只用7 s,峰值电流达到300 A,电磁噪音低于75分贝。倒退加速时电流波形如图11所示,0~20 km/h加速时间大概3 s左右,峰值电流达到250 A。

图10 前进加速电流波形

图11 倒退加速电流波形
4 结束语
本文从实际应用角度出发,设计出的这款电动汽车驱动器,硬件上具有成本低廉、工艺简单、易于生产等优点,软件采用先进的转速闭环矢量控制,具有运行稳定、动态调整快、效率高等优点,通过台架和上路测试发现此控制器完全可以满足低速电动车所需要的所有功能,并且已经通过行业标准18488所规定的温升测试、震动测试、短路测试等相关测试,目前已经量产。
[1] 万晓凤.纯电动汽车三相异步电动机矢量控制[J].微特电机, 2012,40(1):61-63.
[2] 谭延良.纯电动汽车交流感应电机控制系统设计[J].电气传动,2012,54(4):7-9.
[3] 李祥飞.基于矢量控制的电动汽车用异步电机控制系统设计[J]. 电力电子技术,2010,44(7):38-39.
[4] SHIN HWI BEON New anti-windup PI controller for variable speed motor drives [J]. IEEE Trans on Ind Elec 1998,45(3):445-450.
Development of a Motor Controller for Blade Electric Vehicles Based on Vector Control
Li Xuehua ,Wang Shiwei
(Qingdao Yunlu New Energy Technology Co., Ltd., Qingdao Shandong 266000, China)
This paper presents the design of a 5 kW motor controller developed for blade electric vehicles. In the respect of hardware design, the controller adopts MOSFET parallel technology of low voltage and high current, using CPU with high price/performance ratio ARM as its core. As for its software design, high-performance current vector control is used to achieve accurate control over the asynchronous AC motor, and vehicle control logic is provided in addition. It is characterized through low cost, simple processing, high reliability and mass production ability. Experimental results have verified its practicality and reliability, and mass production has been realized.
blade electric vehicle;motor controller; MOSFET; vector control;asynchronous AC motor
U469.72
A
1000-3886(2017)04-0029-03
10.3969/j.issn.1000-3886.2017.04.009
定稿日期: 2016-12-18
李学华(1982-),男,山东青岛人,电力系统及自动化,研究生,工程师,主要研究方向是新能源汽车电机控制器。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
现代防御技术(2016年1期)2016-06-01
航天制造技术(2016年6期)2016-05-09
新高考·高一物理(2016年1期)2016-03-05
探测与控制学报(2015年4期)2015-12-15