
基于不同啮合线对双螺杆空气压缩机转子的设计分析
2017-11-01 10:40李雪斌王坤郭堂成
数码设计 2017年4期
李雪斌*,王坤,郭堂成
(安徽理工大学机械工程学院,安徽淮南,232001)
基于不同啮合线对双螺杆空气压缩机转子的设计分析
李雪斌*,王坤,郭堂成
(安徽理工大学机械工程学院,安徽淮南,232001)
介绍了双螺杆空气压缩机转子型线设计的研究现状及主要方法。重点研究基于啮合线反求转子型线的新方法,根据阴阳螺杆转子坐标系建立了啮合线坐标系,研究了啮合线为点、直线和曲线时反求转子型线的方法,最后得出不同啮合线下的转子型线的通用计算公式,为双螺杆空气压缩机转子型线的设计提供了参考。
双螺杆空气压缩机;阴阳螺杆转子坐标系;啮合线坐标系;转子型线
引言
螺杆式空压机顾名思义,其主要部件是压缩转子[1]。压缩转子通常有两个螺杆和转子壳体组成。随着工业及制造业不断地发展,早在上个世纪三十年代,市场就需要一种大产气量大、流量稳定、能适应压力不断变化工况的旋转式压缩机,因此众多科研机构都投入了大量的人力和物力研究。随着技术的不断进步,高效和高精度的螺杆转子被广泛的制造和使用。由于螺杆式空压机结构简单、可靠性高、能满足变压力工况且供气量大的要求,所以螺杆式空压机被广泛地使用。
1 研究现状
目前在螺杆式空压机的设计中,转子型线的设计一般是根据转子的动静坐标系正向设计,其过程[1]是:一,首先利用包络条件和共轭理论求出转子的型线,然后根据公式求出转子的接触线,最后根据这些参量求出转子的啮合线;二,根据计算出的转子啮合线去计算转子的泄漏三角形、密封容积及接触线长度等;三,根据以上所求的参数推算转子的性能,然后给出修正系数校正。这种设计方式影响因数很多,设计周期较长,计算量很大。本文提出可以根据设计要求先设计转子啮合线,然后根据啮合线去求转子的型线,这种设计方法准确性高,设计周期短。
2 啮合线坐标系的建立
本文使用啮合线法线原理设计转子型线[2],首先建立相关的坐标系,然后计算出阴阳转子坐标系与啮合曲线坐标系之间的转化公式,坐标系见图1所示:
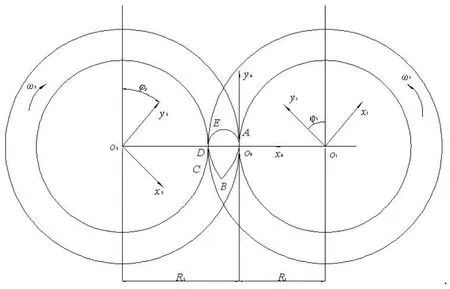
图1 转子啮合线坐标系
如图所示O0x0y0表示转子啮合线的坐标方程,其中点O0即为阴阳转子节圆的相切点。其中φ1,φ2分别表示阴阳转子的坐标系沿逆时针方向旋转的角度,R2、R1分别表示阴阳转子的节圆半径,ω2、ω1分别表示阴阳转子的角速度。由于阴阳螺杆也是齿传动的一种,因此阴阳螺杆的传动比是固定不变的[3]。所以根据齿轮传动知识有:
其中:n1,n2代表阴转子和阳转子的转速r/s;i代表阴阳转子的传动比;A代表阴转子和阳转子的中心距。Z1、Z2表示阴阳转子的螺旋齿数。
至此可以得出阳转子坐标系、阴转子坐标系和啮合线坐标系的转换关系。
阳转子动态坐标系与啮合线坐标系之间的转换公式有[4]:

阴转子动态坐标系与啮合线坐标系之间的转换公式有:
在啮合线法的设计中坐标系的建立是一切运算的基础,建立正确的坐标系才能计算出正确的坐标系转换关系,正是因为坐标系之间满足一定的转换关系才使得设计过程中的计算顺利简化。
3 基于啮合线原理的转子型线设计
阴阳螺杆转子为啮合工作的方式,其啮合过程满足齿轮的啮合定律,即在阴阳转子啮合过程中的任意时刻、任意啮合点处的公法线一定通过阴阳螺杆的节点(节点是阴阳螺杆各自节圆的相切点),也就是说在阴阳螺杆啮合过程中形成的啮合线上的任意一点P,P点的法线也一定经过节点O。由此可知在阴阳转子啮合线上的任意一点P,连接点P与节点O所得到的直线即为P点的法线,这个原理称之为啮合线法线原理。利用这一原理可以进一步探讨基于啮合线法线原理的转子型线设计理论[5]。
在基于转子啮合线法线原理设计转子型线时,一般啮合线是作为已知条件的,假设啮合线的表达方程[6]为:

由基本物理知识可知,在啮合曲线上的任意一点P,在P点处的瞬时速度方向就是此点的切线方向,在点P处的法线垂直于该点的切线,所以由公式:

在计算公式(7)时要确保阴阳转子的啮合曲线的点在同一坐标系内,根据公式(1)可将阴阳转子不同坐标系内的点转换至同一坐标系内。由此可得:
通过观察可知,在公式(8)中t和φ1为可变参量。由公式(8)可以确认任意时刻阳转子型线上相应点的位置关系。如果对公式(5)中的变量x2、y2分别对t和φ1求偏导数[7],再联立公式(8)整理化简后得:
由于在阴阳转子坐标系中关于转子型线的x1、y1、x2、y2方程未知,但是在啮合线坐标中关于x0、y0的方程已知,所以通过坐标转换方程(5)计算得:

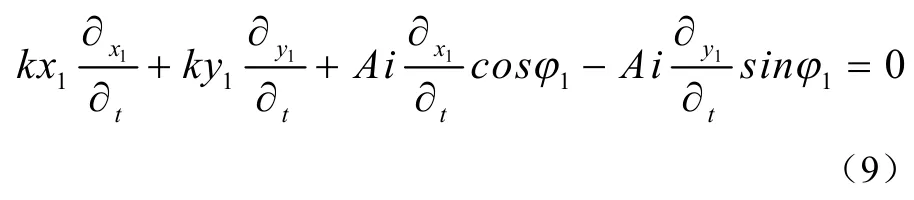
对公式(10)中的x1、y1分别对t求偏导数,结合公式(9)、(10)代入化简后

由于除了φ1、t未知其他参数均是已知条件,化简公式(11)后可得:

由计算过程可知在实际的计算中只要知道啮合线坐标参数和转子传动比就可以反求出阳转子的型线方程。
4 啮合线类型对转子型线设计的影响
啮合线是有很多段曲线段组成的,因为啮合线的类型很多,每一种类型所对应的转子型线都各不相同,因此在啮合线设计过程中需要对组成啮合线的每一段曲线进行定义,包括曲线的性质、几何类型和具体的数学表达方式。目前组成啮合曲线最常见的曲线段包括点、圆弧曲线和直线段。以下经分别探讨这些类型的定义方式及其性质:
4.1 转子啮合线为点型
对于点这种类型非常的特殊,假设转子在啮合过程中产生的啮合曲线为一点,那么我们可以直接写出其在啮合坐标系中表达式为:

其中:xq表示啮合点对应的x值;yq表示啮合点对应的y值。当把(13)带入公式(11)中,如果要使公式(11)成立,就有(11)中所有非零项全部为零,由此可知y0=yq=0即该点只存在于X轴上,阴转子与阳转子的轴心连线为坐标系中的X轴[8]。
由于啮合线为一个点,所以公式φ1=φ1(t)不成立,虽然角度公式不成立但是该点对应的转子型线是可求的。将已知的公式(13)整理带入公式(13)中可得阳螺杆转子型线的计算方程:

同理,将已知公式(13)整理带入公式(5)中可得阴螺杆转子型线的计算方程:

有以上分析可知,当转子啮合线类型为点时,即使转子啮合线的角度方程不成立,但是其对应的转子型线确实可求,并且在这种情况下所求得的转子型线是以螺杆的轴心为中心的圆弧段。
4.2 转子啮合线为直线

图2 直线参数坐标系
在转子型线设计中,转子啮合线为直线的情形较为常见,当转子啮合线为一条直线时,坐标系关系如图2。其参数方程:
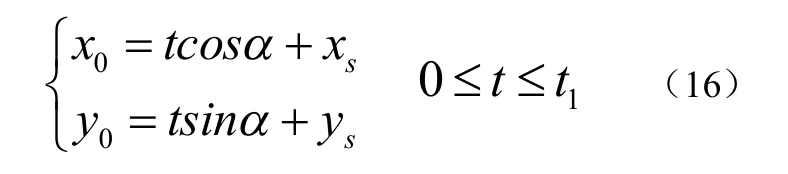
其中:t表示啮合直线的长度;(xs,ys)表示啮合直线的起点;α表示啮合直线与坐标轴X轴的夹角。对方程式(16)求导带入方程(12)后积分可得:

根据方程(17)可知,φ1与t的值相对应,t的值变化φ1的值也会相应的变化,变化关系遵从方式(17)。
当转子啮合线为直线时,有方程φ1=φ1(t)成立。联立参数方程(4)、(5)和(17)整理化简后可得阳转子型线计算公式[9]:
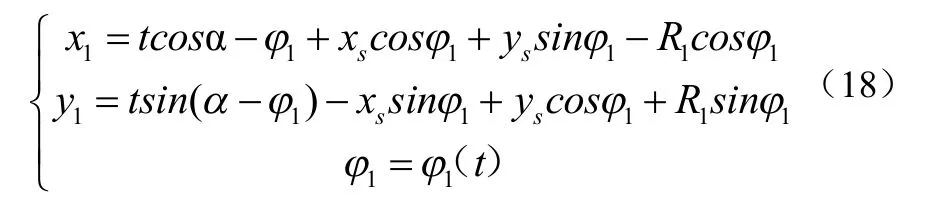
联立参数方程(5)、(16)和(17)整理化简后得阴转子型线计算公式:
至此啮合线是直线的情况分析完毕,给出了相应的转子型线计算方程,参照齿轮现有的结论可知,当转子啮合线为直线时转子的型线为渐开线。
4.3 转子啮合线为圆弧段

图3 圆弧参数坐标系
当转子啮合线为圆弧时,如图3所示坐标系方程,计算方程如下:
其中:β表示圆弧任意一条半径与坐标系X轴的夹角;(x0,y0)表示啮合圆弧的圆心;r表示半径。对公式(20)求导带入公式(12)积分可得:

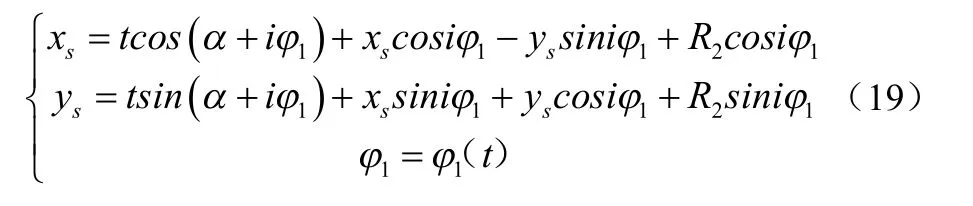
从方程式(21)中可以看出,φ1的值随角度t的变化而变化,上述分析可知当φ1=φ1(t)成立时,只需要联立公式(4)、(20)和(21)整理化简得阳转子型线计算公式;

同理,当 φ1=φ1(t)成立时,只需要联立公式(5)、(20)和(21)理化简得阴转子型线计算公式:

以上计算所得公式(22)和(23)是啮合线为圆弧时,计算转子型线的通用公式。
5 结束语
本章首先重点研究了基于转子啮合线反向设计转子型线的计算方法。
(1)建立了转子啮合线的坐标系,推算出转子啮合坐标系的坐标转换关系,为反求转子型线提供了理论基础。
(2)探讨了转子啮合线设计的原则,因为转子啮合线是有许多不同的曲线段组成的,不同的曲线类型都对应着不同的转子型线类型,所以转子型线的设计直接决定转子型线的性能。
(3)不同类型的转子啮合线对应着不同的转子型线类型,重点分析了三种不同的啮合线类型以及基于不同啮合线反求转子型线的方法,推导出了各自阴阳转子的计算公式。
[1]邢子文.螺杆压缩机:理论,设计及应用[M].机械工业出版社,2000.
[2]何雪明,戴进,刘洪园.基于自由曲线的螺杆转子型线的正反向设计[J].中国机械工程,2012,23(22):2752-2757.
[3]吴慧媛,何雪明,潘成龙.基于流体仿真的双螺杆压缩机转子型线研究[J].中国机械工程,2013,24(22):3080-3085.
[4]吴华根,邢子文,束鹏程.R134a螺杆制冷压缩机工作过程数值模拟及实验研究[J].西安交通大学学报,2004,38(5):487-490.
[5]邢子文,彭学院,束鹏程.螺杆压缩机设计计算软件的研究与开发[J].西安交通大学学报,1999,33(11):38-42.
[6]徐长顺,王中双,陈集.螺杆式压缩机转子螺齿压缩侧齿槽面积的数值计算方法[J].机械设计与制造,2009,6:035.
[7]严迪.两级喷油螺杆压缩机型线设计与加工技术研究[D].重庆大学,2012.
[8]吴华根,唐昊,王养浩,等.间隙对双螺杆制冷压缩机性能的影响[J].西安交通大学学报,2015,49(2):130-134.
[9]石国荣,隋连香,查继红.螺旋曲面的数字化测量及数据处理技术[J].沈阳工业学院学报,2004,23(2):80-82.
Design and Analysis of Rotor of Two-Screw Air Compressor Based on Different Meshing Lines
LI Xuebin*,WANG Kun,GUO Tangcheng
(School of Mechanical Engineering,Anhui University Of Science And Technology,Anhui Huainan,232001,China)
The research status and main methods of the rotor profile design of rotor of two-screw air compressor are introduced.This paper focuses on the new method of rotor wire based on meshing line,and according to the coordinate system of yin and yang screw rotor,the meshing line coordinate system is established,and study the method of finding the rotor profile when the meshing line is the point,the straight line and the curve.Finally,a general formula for calculating the rotor profile under different meshing lines is obtained,which provides a reference for the design of the rotor profile of rotor of two-screw air compressor.
twin-screw air compressor; yin and yang screw rotor coordinate system; meshing line coordinate system; rotor profile
TP973
A
1672-9129(2017)04-0045-04
李雪斌,王坤,郭堂成.基于不同啮合线对双螺杆空气压缩机转子的设计分析[J].数码设计,2017,6(4):45-48.
Cite:LI Xuebin,WANG Kun,GUO Tangcheng.Design and Analysis of Rotor of Two-Screw Air Compressor Based on Different Meshing Lines[J].Peak Data Science,2017,6(4):45-48.
10.19551/j.cnki.issn1672-9129.2017.04.013
2016-12-23;
2017-01-19。
李雪斌(1965),男,安徽淮南,副教授,研究方向:流体机械。E-mail:117329790@qq.com
猜你喜欢
压缩机技术(2022年2期)2022-05-19
橡塑技术与装备(2022年4期)2022-04-27
商品与质量(2021年43期)2022-01-18
Language and Semiotic Studies(2021年3期)2021-10-25
防爆电机(2021年3期)2021-07-21
流体机械(2021年12期)2021-02-16
武术研究(2019年12期)2019-04-20
江苏船舶(2018年4期)2018-11-23
船海工程(2018年5期)2018-11-01
科技与创新(2017年11期)2017-07-01
