基于鱼群算法的极限学习机影像分类方法优化
2017-11-15 09:29季昊巍NICOSneeuw
农业机械学报 2017年10期
林 怡 季昊巍 NICO Sneeuw 叶 勤
(1.同济大学测绘与地理信息学院,上海 200092; 2.斯图加特大学航空航天与大地测量学院, 斯图加特 70173-70619)
基于鱼群算法的极限学习机影像分类方法优化
林 怡1季昊巍1NICO Sneeuw2叶 勤1
(1.同济大学测绘与地理信息学院,上海 200092; 2.斯图加特大学航空航天与大地测量学院, 斯图加特 70173-70619)
在传统极限学习机(ELM)研究的基础上,考虑到传统ELM参数的不确定会导致整体分类精度下降,利用仿生鱼群算法(AF)对ELM的小波核参数和正则化参数进行寻优,并构造参数优化后的小波ELM影像分类模型(AF-ELM)。通过实验比较了该算法与人工神经网路(ANN)、支持向量机(SVM)、极限学习机(ELM)等标准分类器在遥感影像分类上的精度与速度差异,并且与ELM多项式核、RBF核分类算法进行比较分析,验证了AF-ELM在分类速度和精度上的优越性。实验结果表明,AF-ELM分类方法分类速度较快,精度较高,均优于其他分类方法。能较好地应用于遥感影像上各类地物要素的自动提取。
极限学习机; 鱼群算法; 影像分类; 小波核函数; 遥感影像; 优化
引言
遥感技术以其快速、准确的特点在大尺度土地利用动态监测中具有明显的优势,能够为地球资源调查与开发、土地利用/覆盖变化(LUCC)信息的获取以及环境动态监测等研究提供一种探测手段,在国内外已经得到了广泛应用[1-2]。而遥感影像的自动分类方法,是遥感影像自动识别、获得LUCC变化的一个重要环节,其目的是对不同地物的类型进行判别[3-4]。目前有很多方法可以对遥感影像进行分类,如支持向量机(SVM)、决策树(Decision Tree)、人工神经网络(ANN)等[5]。然而SVM需要进行多种分类器的组合,速度较慢[6];决策树分类需要大量样本,不能达到全局最优;神经网络算法虽然具有较强的学习能力,但学习速度较慢且易限于局部最小,效率较低[7],这些缺点极大制约了分类方法的应用和发展[8]。
因此,极限学习机(Extreme learning machine, ELM)在单隐层神经网络(SLFN)基础上应运而生,该算法学习速度快、泛化性能好,很好地满足一些领域对准确率和速度的双重要求。DENG 等[9]在传统 ELM 模型基础上,在法方程矩阵中加入正则化对角阵,使得矩阵的特征根偏离零值,构建了更稳定、泛化性能更好的正则化 ELM 改进模型。HUANG 等[10-11]将 ELM 与机器学习领域中应用非常广泛的 SVM 算法进行了比较,得出在多分类问题中,ELM 与 SVM 相比,分类精度更高、耗时更短。吴军等[12]结合了正负模糊规则和极限学习机使得影像分类结果较为理想;杨易旻[13]将改进的极限学习机应用到模式识别中,提高了其相关性能。上述研究中 ELM 仍存在抗粗差能力差、模型参数估计不稳定等问题,而且正则化参数在一定数值范围内的微小变化会对最终 ELM 模型精度产生巨大影响。
由于ELM的速度和精度受其相关参数组合方式的影响,因此需要利用仿生学的智能算法对其进行优化,如常见的遗传算法(GA)全局寻优能力较强而局部寻优能力较差,易出现早熟收敛现象,粒子群算法(PSO)能够进行局部寻优但速度较慢。而人工鱼群算法(AFSA)是一种模仿鱼群行为,通过搜索最优值以对整体进行优化的智能算法[14]。该算法不要求较多的初值而且通过寻找全局极值来克服局部性问题,在ELM分类器的参数寻优中相对其他仿生算法具有极大优势[15]。
本文将以小波核函数作为ELM 激活函数的分类器,并利用AF优化算法进行寻优以构造一个更优化的分类器。首先利用鱼群算法对ELM分类器中的核参数和正则参数的最优值进行搜索,然后,通过对研究区影像数据进行训练,寻找并建立最优目标函数,采用AF算法在给定的范围内对参数进行优化,寻找鱼群周边食物浓度最大值所在的位置即分类最优值;然后,对其核参数和正则参数的组合参数进行优化以提高ELM分类器对影像的分类精度;同时将本文方法和常规的人工神经网路(ANN)、支持向量机(SVM)和极限学习机(ELM)3种方法对研究区影像的分类结果进行综合比较分析以验证本文构造的AF-ELM分类器的优越性,最后实现对研究区影像的整体分类。
1 实验
1.1 研究区概况
研究区位于安徽省中部的环巢湖流域,流域面积约4 000 km2,其位置为116°24′30″E~118°0′0″E,30°58′40″N~32°6′0″N,处于长江、淮河两大水系之间。地处江淮丘陵地带,四周分布大量低山丘陵,地势为西高东低、中间低洼平坦。属于亚热带和暖温带过渡性的副热带季风气候区。由于整个研究区域面积较大,进行全部分类所耗时间较长,因此选择其影像的部分区域进行实验分析。该地区地物类别较丰富,适合进行研究分析,面积为111 km2,如图1中方框所示。

图1 2013年环巢湖流域影像图Fig.1 Image of Chaohu Lake Basin in 2013
1.2 数据来源
采用的卫星影像数据是较高光谱分辨率的Landsat-8的TM、ETM+数据,波段选择为常用的4、3、2组合多光谱波段与较高空间分辨率的ZY-1 02C卫星全色波段。由于植被在生长过程中会呈现不同的光谱特性,为保障多时相数据分析可靠性,采用了2013年8月7日的环巢湖卫星影像数据。表1、表2分别为Landsat-8 相关的数据技术指标以及ZY-1 02C卫星参数。
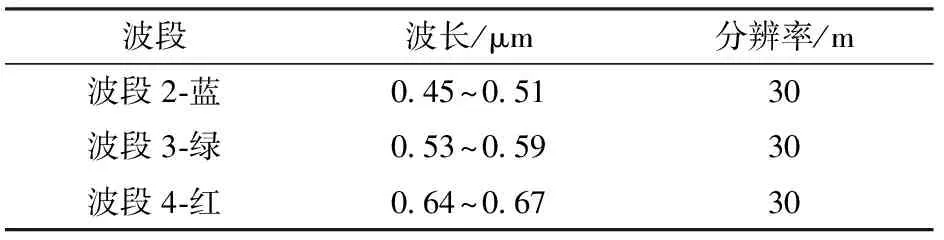
表1 Landsat-8数据技术指标Tab.1 Landsat-8 data technical indicators
1.3 ELM的基本理论
网络模型的隐节点个数只要足够定义,隐含层前馈神经网络模型的输入权值和偏置即使是在任意取值的情况下,该模型也能够逼近任意连续函数[16]。
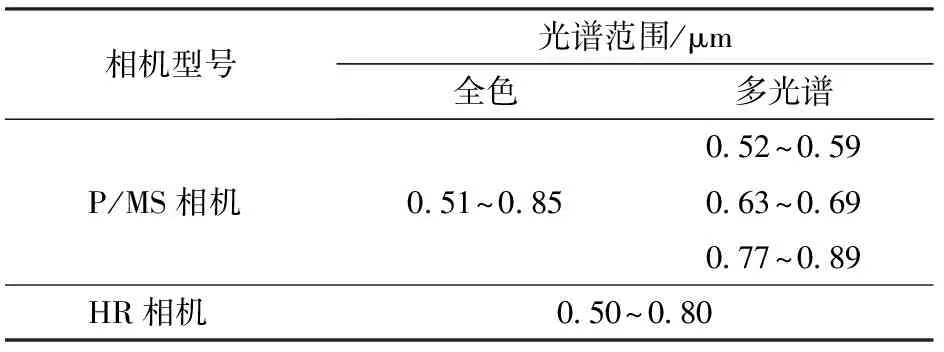
表2 ZY-1 02C卫星参数Tab.2 Parameters of ZY-1 02C satellite
若训练集样本数与隐含层神经元数相等,则对于任意的权重w和偏置b,单隐含层前馈神经网络都能够用零误差逼近训练样本,即

(1)
其中
y=[y1jy2j…ymj]T
(2)
式中y——输出矩阵
tj——期望输出矩阵中元素
yj——输出矩阵中元素
通常为了减少计算量,隐含层神经元个数K通常比训练样本个数Q小,单隐含层前馈神经网络的训练误差可以逼近ε>0,即

(3)
因此,当激活函数g(x)无限可微时,可以部分调整单隐含层前馈神经网络的参数,在训练前可以随机选择w和b,且在训练过程中保持不变[17]。而隐含层与输出层的连接权值可以通过求解以下方程组的最小二乘解获得

(4)
其中
=H+T′
(5)
式中H——输出矩阵
H+——隐含层输出矩阵H的Moore-Penrose广义逆
T′——期望输出矩阵
求解H的Moore-Penrose广义逆采用奇异值分解法。即
=(HTH)-1HTT′
(6)
因此,极限学习机在训练之前可以随机产生权重w和偏置b,连接权值可以通过隐含层神经元个数及隐含层神经元的激活函数计算。核函数的基本原理是通过非线性函数Φ把输入空间样本数据映射到高维特征空间,然后在高维特征空间进行数据的处理[18]。本文选择可容许条件的小波基函数作为ELM分类模型的核函数。但是由于小波对信号整体进行内积,使得信号特征的精度下降,且小波的多级分解会使得其下降速度加快,导致整体效果较差。因此,需要对其相关参数进行优化以改善其性能。
1.4 鱼群算法优化
如图2所示,模拟的人工鱼当前位置为X,其视野范围为V,其视点在某一时刻停留的位置为XV,若该位置XV的食物浓度高于当前位置X的浓度,则人工鱼向食物方向前进一步到达Xn;若浓度低于当前位置的浓度,则搜索其他方向的食物。搜索的次数越多,则对周围环境更加了解,以便做出相应的判断和决策[19]。适当增加的不确定性有助于避免局部最优状况,从而搜寻全局最优。
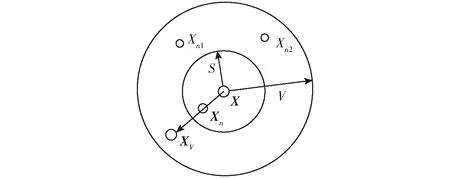
图2 人工鱼的视野和移动步长Fig.2 Artificial fish field of view and moving steps
图2中,人工鱼当前位置为X=(x1,x2,…,xn);视野所看到的位置为
搜寻食物的过程为
(7)
(8)
式中r——[-1,1]区间的随机数
xi——人工鱼位置
Xn——移动后下一位置
XV——视野所看到的位置
S——人工鱼移动的步长
图2中Xn1、Xn2分别为一视野范围内2条鱼的位置。由于环境里的其他人工鱼数目是有限的,因此人工鱼在视野中相互感知,并相应改变自身位置的方法仍与式(8)相同。
通常情况下鱼类的主要行为:
(1)觅食行为:鱼类生存最基本的行为主要就是向食物靠近的过程;该行为通过视觉来感知食物浓度来进行移动。因此,该行为能够融入视觉概念。
(2)聚群行为:鱼群长期生存过程中形成的一种生活方式,数目极大的鱼群汇聚在一起能够进行统一觅食和躲避敌害的危险。
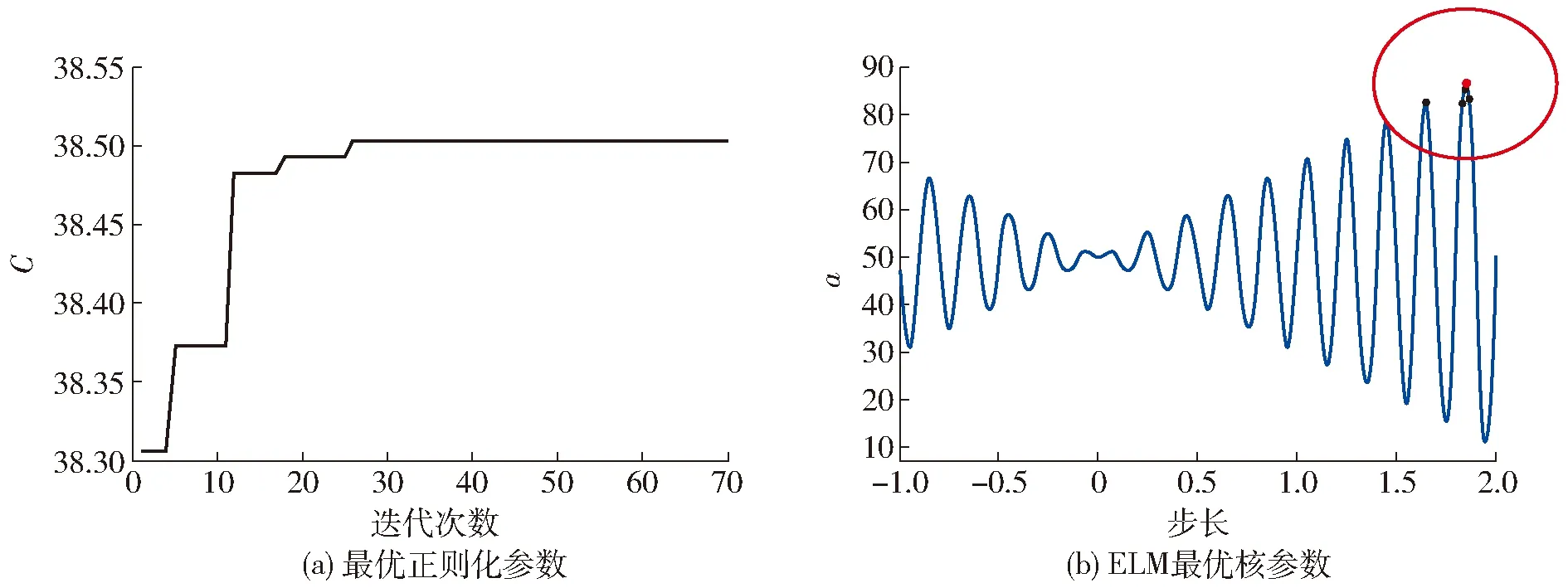
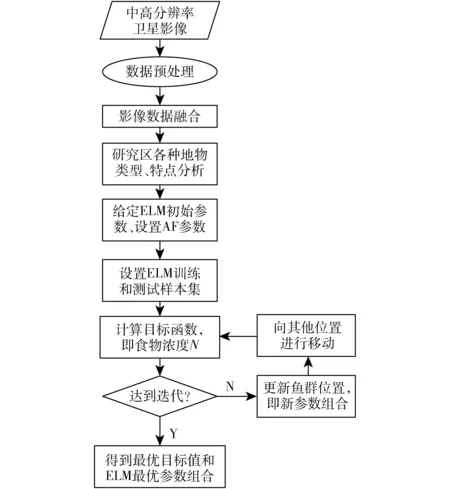
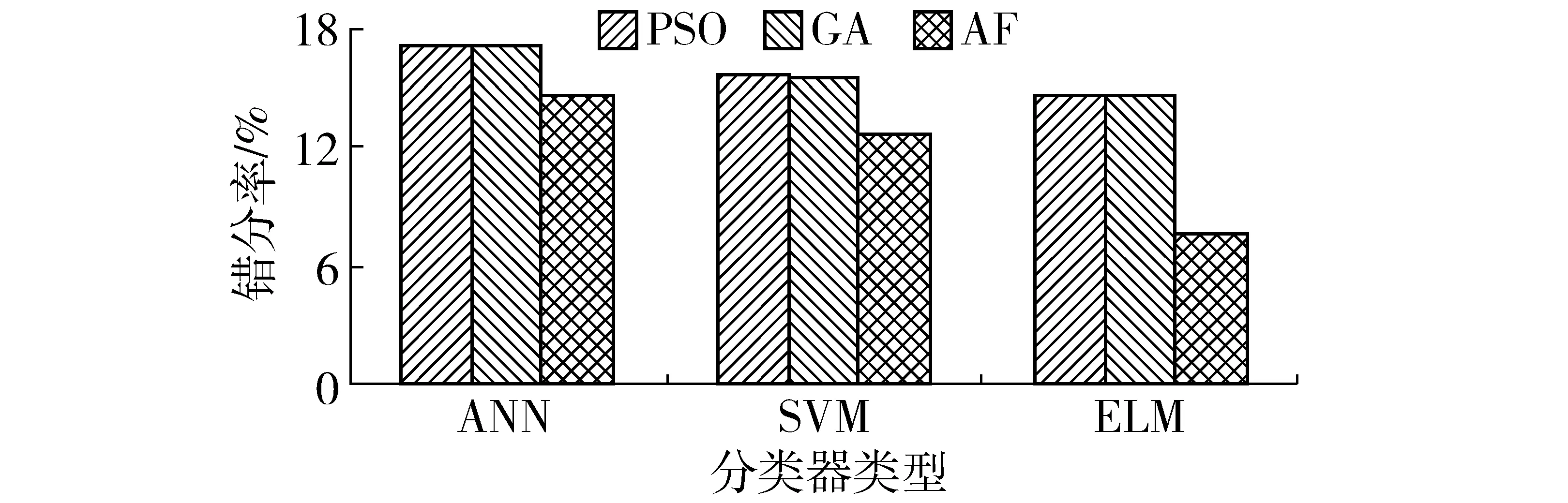
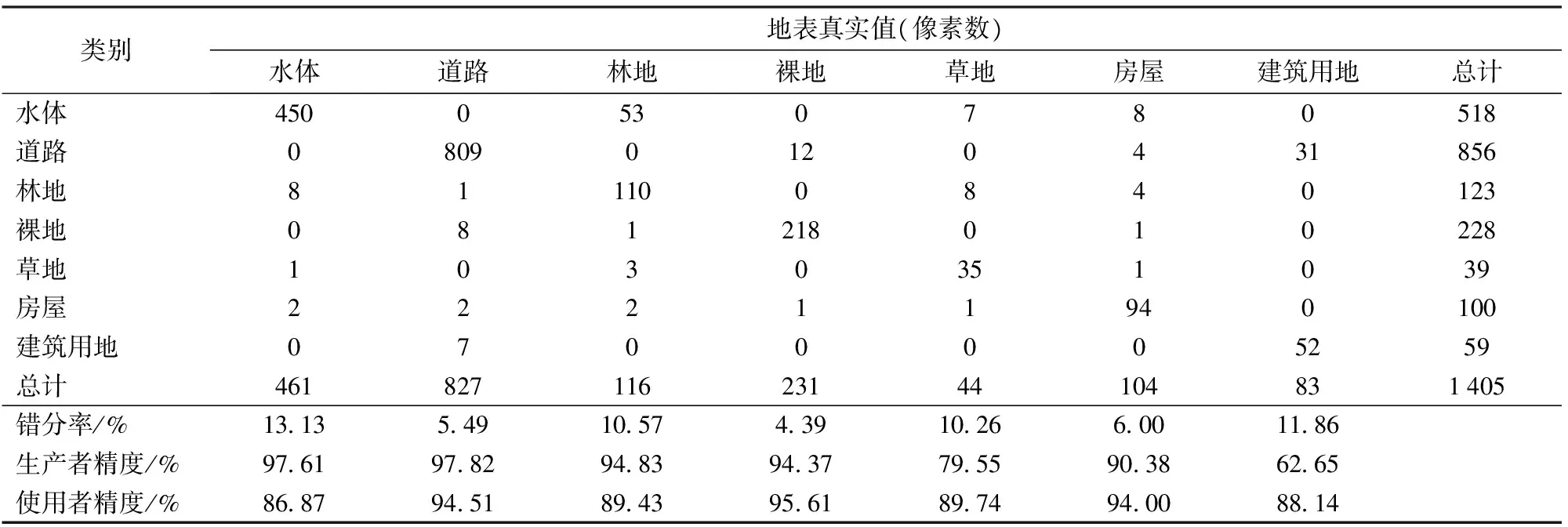
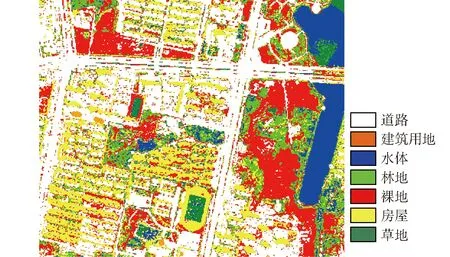
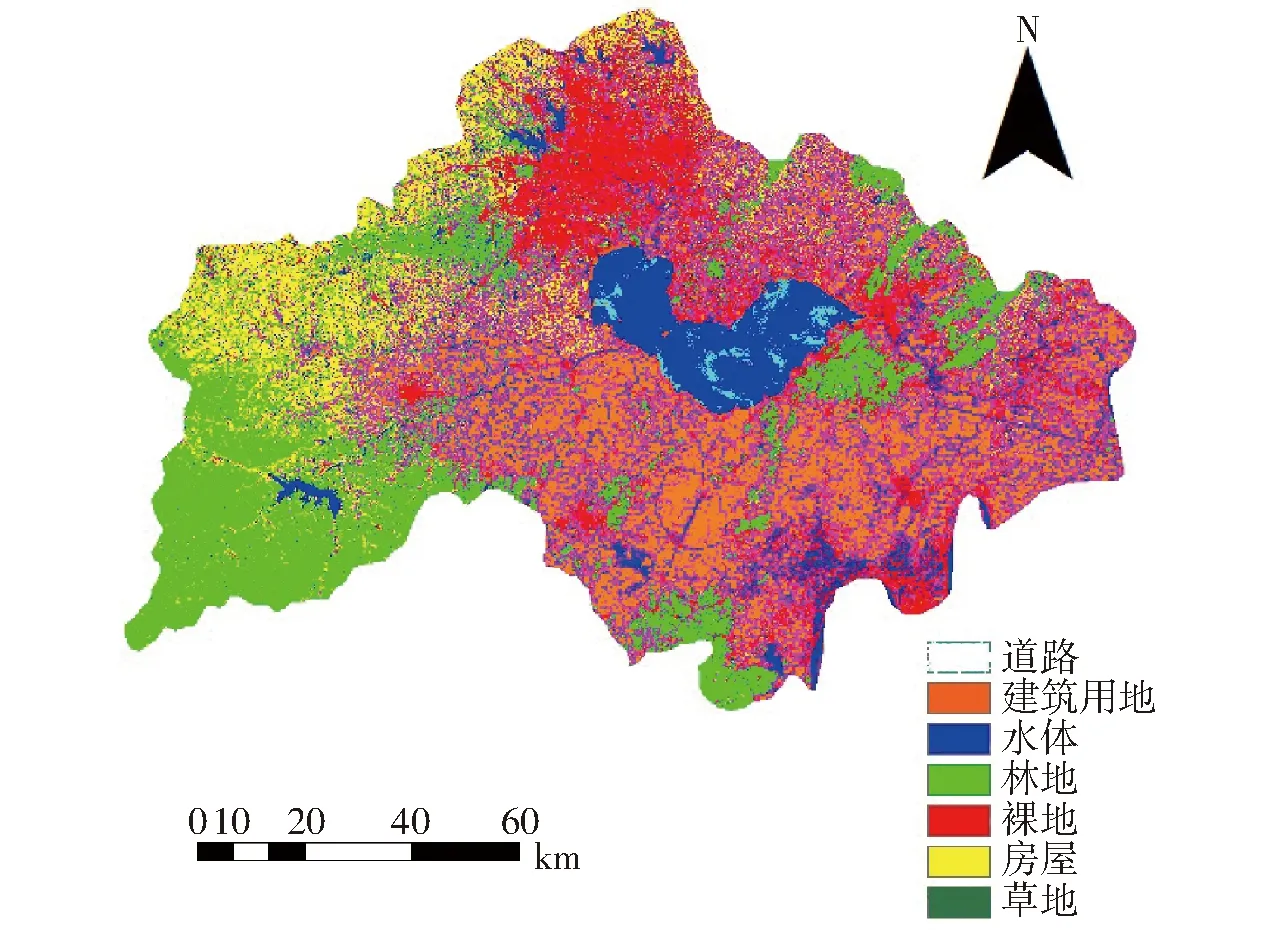
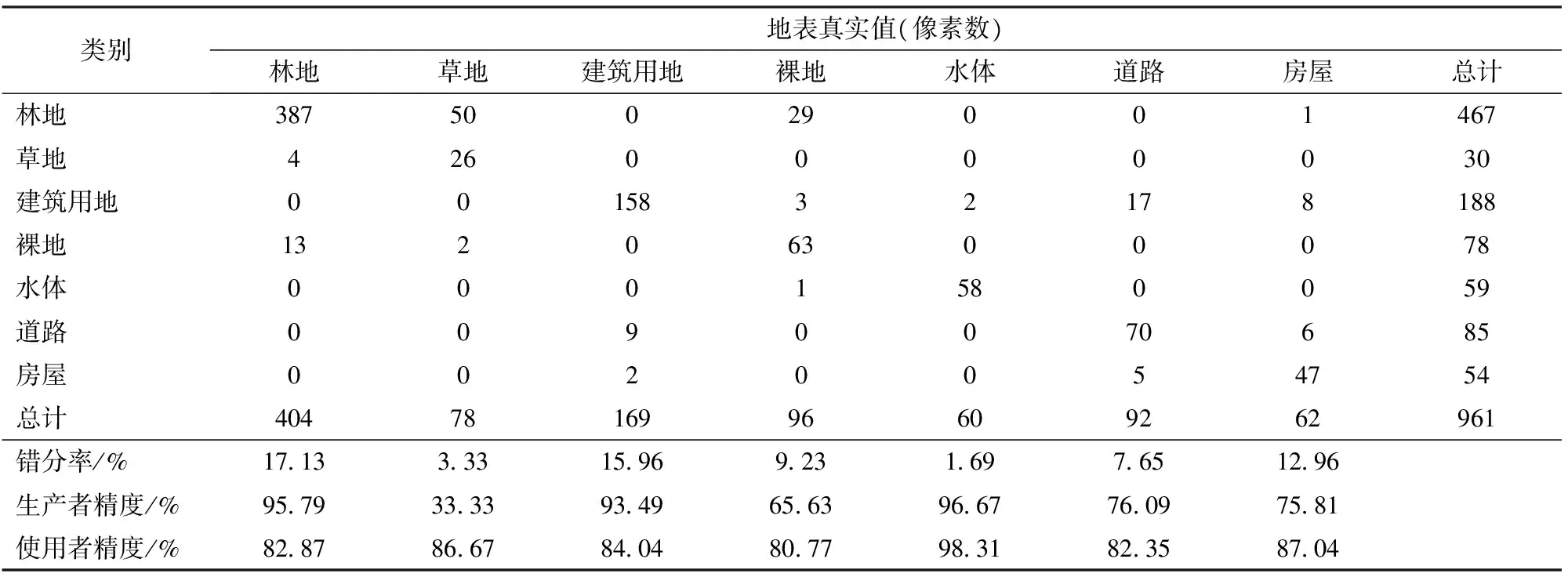
设人工鱼当前状态为Xi,探索当前领域内(di,j (9) 式中 ∂——拥挤度因子 表明其他鱼群位置处有较高食物浓度且鱼群数目较小,则向该位置前进一步;否则执行觅食行为。 (3)追尾行为:鱼群附近的鱼群会尾随其靠近食物,且更远处的鱼群也会同样尾随的一种方式。 (4)随机行为:鱼类在水中的位置及状态是随机的,这种随机行为是为了更大范围地搜寻食物以及伙伴。 通过Matlab平台编程得到正则化参数C和核参数a的优化过程及结果如图3所示。 图3 寻优过程Fig.3 Optimization process 图3为对正则化参数和ELM核参数的优化过程,最终得到最优正则化参数C的目标值为38.50和ELM最优核参数a为 85.06,所用时间为2.97 s。由于核参数和正则化参数的不同选择将会对后续分类实验的精度产生影响,因此通过鱼群寻优算法得到的参数值将会提高后续分类实验的精度。 1.5 实验步骤 基于上述理论,首先对高分辨遥感影像进行数据预处理,然后为了得到较高空间分辨率和光谱分辨率的影像,进行了影像的数据融合,在对研究区各种地物类型特点进行分析之后,运用鱼群算法对其参数进行优化。现对其进行重点阐述,实验步骤如下: (1)设置鱼群算法初始参数,包括人工鱼群个体大小Nfishnum,人工鱼的感知距离V,人工鱼移动步长S,拥挤度∂,觅食行为尝试的最大次数Ntry_number,当前觅食行为次数n,最大迭代次数NMAXGEN。 (2)通过对研究区地物特点(道路、林地、裸地、草地、房屋、建筑用地、水体)进行分析以设置研究区影像的训练样本和测试样本。 (3)对参数进行搜索和优化。根据式(9)判断伙伴中心是否存在较多食物且不太拥挤,然后再根据式(7)、(8)更新人工鱼的空间位置,再经过随机扰动不断迭代获取鱼群周边食物的最高浓度所在的位置数据,即为最优目标函数值。 (4)当满足迭代要求时,转到步骤(5),否则转回步骤(3),进行下一次搜索。 (5)输出全局最优点和最优个体值。 改进ELM算法参数选择优化流程如图4所示。 图4 鱼群算法流程图Fig.4 Flow chart of fish algorithm 1.6 参数设置 通过对参数的调整,能够避免算法陷入局部最优和加快收敛速度,同时适当的参数组合可以得到较好的精度和稳定性,根据实验及相关文献得到参数设置的依据[20]为: (1)寻优的精度将会随着移动步长S的减少而提升,反之将会降低。 (2)随着步长的逐步增加,迭代次数逐步减少,但是在超过一定范围后,迭代次数增加,收敛速度减缓,当步长过大时,会出现振荡现象。因此需要采用合适的步长使算法达到最好的寻优效果。 (3)感知距离V对优化精度有一定的影响,V越大,优化精度越低。但是在步长一定的情况下,迭代次数随着视野的逐步增加有少量幅度不大的减少,而较小的视野能够收敛到较好的结果。 (4)增加最大尝试次数Ntry-number能够减少人工鱼的随机游动从而提高算法的收敛效率,但是增加了计算时间。 (5)优化精度随着鱼群大小Nfishnum的增大而不断提高,但Nfishnum超过一定数量后,提高幅度较低,其运行时间与Nfishnum呈正比增大。 (6)正则化参数C用于控制模型复杂度和逼近误差的折中,C越大则对数据的拟合程度越高。但泛化能力将降低。 (7)增加迭代次数和鱼群大小虽然能够得到更优的ELM参数,但是需要耗费大量时间,效率较低;而较少的迭代次数和较小的鱼群又不能得到更优的参数,因此需要反复验证,找到最优的参数以保证其效率和精度。 通过综合考虑精度和效率的关系,经过实验验证设置鱼群算法参数为:将极限学习机的正则化参数C设置为[10-6,106],小波核函数参数的搜索范围设置为(0,100)。由于本文研究区地物类别较为丰富,需要引入较大数量的鱼群和较大的感知距离来进行参数寻优以满足本文实验的需求,因此将 AF 中的参数进行初始化设置为:Nfishnum为100,最大迭代次数NMAXGEN为70,Ntry-number为200,V为3.1,拥挤度因子 ∂ 为0.724,S为0.5。 2.1 训练样本与测试样本 训练样本在高光谱遥感分类过程中十分重要,如果训练样本代表性较差,将会对最终分类结果产生影响。为了从研究区影像上提取训练样本作为参考光谱,本文通过在高光谱图像上用训练区(ROI)方法圈定出能够代表该地物的一片均匀区域,在此区域内求出所有像元的均值光谱,并将其作为标准数据建立本文的光谱库。同时通过对研究区的野外调查,了解研究区内地物的分布状况[21]。 测试样本可以通过同样的方法进行建立。训练样本和测试样本数如表3所示。 表3 训练样本和测试样本数Tab.3 Number of training samples and test samples 2.2 相关结果 2.2.1数据融合 影像融合是将用不同传感器对同一地区进行成像,或者传感器相同而成像方式不同的影像融合为一幅影像的过程;其融合的目的是使多光谱影像的空间分辨率得以提高。本文采用HSV融合方法。如图5所示,将多光谱影像(图5a)与全色波段影像(图5b)进行融合,得到更高空间分辨率和光谱分辨率的影像(图5c)。 图5 数据融合影像Fig.5 Data fusion images 2.2.2分类性能对比 将训练数据加入到人工神经网络(ANN)、支持向量机(SVM)、极限学习机(ELM)3种分类器中进行学习,同时利用PSO、GA、AF对分类器的参数进行优化,建立了优化后的分类模型,其分类结果如图6和图7 所示。 图6 不同分类算法下的准确率Fig.6 Accuracy under different classification algorithms 由图6、图7可看出AF-ELM相对于PSO-ELM和GA-ELM的分类性能更优,有效降低了错分率。由于AF算法能够克服局部极值,对搜索空间具有一定的适应能力,同时对参数选取不敏感,从而使得AF算法收敛速度加快,性能更优。 2.2.3各种分类器高光谱遥感影像分类 实验将研究区的地物类别分为7种类型,即水体、林地、草地、裸地、建筑用地、道路和房屋。并设置感兴趣区ROI,具体设置名称、颜色等信息如表4所示。将图1所示区域作为实验区,利用ANN、SVM、ELM进行分类,并和本文AF-ELM的分类结果进行比对分析,结果如图8所示。 图7 不同分类算法下的错分率Fig.7 Error rates under different classification algorithms 表4 感兴趣区设置Tab.4 ROI settings 图8 各种分类方法对比Fig.8 Comparison of various classification methods 由图8可看出,ANN分类效果较差,不能很好地区分裸地及道路,引起了两者的混淆。而SVM将大部分建筑用地错分为房屋。从图8d中黑框可以看出,相对于SVM,AF-ELM将田径场中的草地和塑胶跑道较好地区分了出来。 为了验证分类的精度,引入混淆矩阵计算分类结果的精度。实验主要验证了AF-ELM的精度,其混淆矩阵如表5所示。4种分类方法的总体精度如表6所示。 由表6可看出,AF-ELM的总体精度为91.416 8%,Kappa系数为 0.881 1;相对于其他分类方法而言,其精度更高,并且每类地物的错分点相较于其他方法较少。 2.2.4算法复杂度分析 人工神经网络学习速度较慢,而SVM中训练效率较低主要由于时间都消耗在拉格朗日乘子的计算上,而ELM在样本数据规模较大的时候,隐藏节点数通常远小于训练样本数,使得时间大大减少。4类分类方法所耗时间如表7所示。 表5 AF-ELM混淆矩阵Tab.5 AF-ELM confusion matrix 表6 4种方法总体精度比较Tab.6 Comparison of overall accuracy of four methods 表7 各类分类方法使用时间Tab.7 Time of various types of classification method 由表7可看出,在学习速度上,ELM比SVM更具有优势,而本文AF-ELM的分类效率最高,所用时间为0.897 1 s;同时其精度也较好,达到了91.416 8%。由于ELM不需要调整网络输入权值,在样本数据较大时所需时间小于SVM,因此更具有优势。 2.2.5ELM的不同核函数高光谱遥感影像分类 不同的核函数对应于不同的映射形式,因此基于不同核函数的ELM分类器也具有不同的特点。为了和本文的基于小波核的ELM进行更好比较,选择了多项式核和RBF核极限学习机进行分类,同时选用了相同训练样本,分类结果如图9、图10所示。 图9 多项式核ELM分类结果Fig.9 Classification results of polynomial kernel 图10 径向基核ELM 分类结果Fig.10 Classification results of radial basis function ELM 由图9可看出,分类的重点主要为居民区,但由于居民区附近含有较多的地物,如裸地、草地和房屋,因此导致局部分类精度下降,其精度只有80.62%。而图10中RBF核对于数据中的噪声有着较好的抗干扰能力,但是在本实验中,精度却低于小波核ELM,只有87.54%。 综合比较分析本文所用AF-ELM分类器容易训练、收敛速度较快,分类方法效率及精度都较好,可以适用于研究区遥感影像的分类。将其用于环巢湖研究区影像的整体分类,结果如图11所示。 图11 研究区分类Fig.11 Classification of study areas 由图11可看出,AF-ELM分类器能够对整个环巢湖流域进行较好分类,其分类结果较好。同时,AF-ELM分类器能够更好地提取高光谱影像中多且复杂的地物要素,能够有效去除椒盐现象。 2.2.6环巢湖流域影像分类的精度评价 采用混淆矩阵的方法对分类影像进行精度评价。环巢湖流域影像分类的精度评价如表8所示。由表8可以看出分类的总体精度为94.183 1%,Kappa系数为 0.884 7,通过结合实地调查数据进行相互验证发现本文分类结果更加符合环巢湖流域实际地物的分布情况,分类的精度较好。 表8 混淆矩阵精度评价Tab.8 Confusion matrix accuracy evaluation 注:总体精度为94.183 1%,Kappa系数为0.884 7。 (1)在极限学习机的相关理论的基础上,利用仿生鱼群算法AF对极限学习机的正则化参数和核参数进行了优化,在提高了遥感影像分类效率的同时,其精度也较大提高。 (2)实验结果表明AF-ELM的整体精度为91.416 8%,所用时间为0.897 1 s。这表明极限学习机比支持向量机和人工神经网络的速度更快,而且性能更容易改善;同时,通过和遗传算法和粒子群算法进行比较,人工鱼群算法能够更快、更好地搜索极限学习机的最优参数,因此能够使研究区影像的分类结果更优。 (3)通过将ELM分类器和AF优化算法进行结合构造了一个更优化的分类器,其精度和效率都比传统的ELM分类器有了较大的提升,并将该分类器应用到环巢湖研究区影像的整体分类,总体精度达到了94.183 1%,所得到的分类结果能够为环巢湖流域的地球资源调查与开发、土地利用/覆盖变化(LUCC)信息的获取以及环境的动态监测提供一种技术手段。 1 廖建尚,王立国,郝思媛.基于双边滤波和空间邻域信息的高光谱图像分类方法[J/OL].农业机械学报,2017,48(8):140-146,211.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170815&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.08.015. LIAO Jianshang, WANG Liguo, HAO Siyuan.Hyperspectral image classification method combined with bilateral filtering and pixel neighborhood information[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(8):140-146,211.(in Chinese) 2 ESMAIL M, MASRIA A, NEGM A.Monitoring land use/land cover changes around Damietta promontory, Egypt, using RS/GIS [J].Procedia Engineering, 2016, 154:936-942. 3 林楠,姜琦刚,杨佳佳,等.基于资源一号02C高分辨率数据的农业区土地利用分类[J/OL].农业机械学报,2015,46(1):278-284.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150139&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.01.039. LIN Nan,JIANG Qigang,YANG Jiajia,et al.Classifications of agricultural land use based on high-spatial resolution ZY1-02C remote sensing images[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(1):278-284.(in Chinese) 4 陈元鹏,郧文聚,周旭,等.基于MESMA和RF的山丘区土地利用信息分类提取[J/OL].农业机械学报,2017,48(7):136-144.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170717&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.07.017. CHEN Yuanpeng,YUN Wenju,ZHOU Xu,et al.Classification and extraction of land use information in hilly area based on MESMA and RF classifier[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(7):136-144.(in Chinese) 5 杜斌, 张炜.基于面向对象的高分辨率遥感影像分类技术研究[J].西部资源, 2016(5):135-138. DU Bin, ZHANG Wei.Research on high-resolution remote sensing image classification based on object-oriented [J].Western Resources, 2016(5): 135-138.(in Chinese) 6 谭琨, 杜培军.基于支持向量机的高光谱遥感图像分类[J].红外与毫米波学报, 2008, 27(2):123-128. TAN Kun, DU Peijun.Remote sensing image classification based on support vector machine [J].Journal of Infrared and Millimeter Waves, 2008, 27(2): 123-128.(in Chinese) 7 HUANG G B, ZHU Q Y, SIEW C K.Extreme learning machine: a new learning scheme of feedforward neural networks[C]∥IEEE International Joint Conference on Neural Networks, 2005:985-990. 8 李孝伟, 陈福才, 李邵梅.基于分类规则的C4.5决策树改进算法[J].计算机工程与设计, 2013, 34(12):4321-4325. LI Xiaowei, CHEN Fucai, LI Shaomei.An improved C4.5 decision tree algorithm based on classification rules [J].Computer Engineering and Design, 2013, 34(12): 4321-4325.(in Chinese) 9 DENG W, ZHENG Q, CHEN L.Regularized extreme learning machine[C]∥Computational Intelligence and Data Mining, 2009.CIDM ’09.IEEE Symposium on IEEE, 2009:389-395. 10 HUANG G B, DING X, ZHOU H.Optimization method based extreme learning machine for classification [M].Elsevier Science Publishers B.V.2010. 11 HUANG G B, ZHOU H, DING X, et al.Extreme learning machine for regression and multiclass classification[J].IEEE Transactions on Systems Man & Cybernetics Part B Cybernetics A Publication of the IEEE Systems Man & Cybernetics Society, 2012, 42(2):513-529. 12 吴军,王士同,赵鑫.正负模糊规则系统、极限学习机与图像分类[J].中国图象图形学报,2011,16(8):1408-1417. WU Jun, WANG Shitong, ZHAO Xin.Positive and negative fuzzy rules system, limit learning machine and image classification [J].Journal of Image and Graphics, 2011, 16(8): 1408-1417.(in Chinese) 13 杨易旻.基于极限学习的系统辨识方法及应用研究[D].长沙:湖南大学,2013. YANG Yimin.Study on system identification method and its application based on extreme learning [D].Changsha:Hunan University, 2013.(in Chinese) 14 江铭炎.人工鱼群算法及其应用[M].北京:科学出版社, 2012. 15 SHEN M, LI L, LIU D.Research and application of function optimization based on artificial fish swarm algorithm[C]∥Proceedings of the 4th International Conference on Computer Engineering and Networks.Springer International Publishing, 2015:195-200. 16 洪炳熔, 金飞虎, 高庆吉.基于蚁群算法的多层前馈神经网络[J].哈尔滨工业大学学报, 2003, 35(7):823-825. HONG Bingrong, JIN Feihu, GAO Qingji.Multi-layer feedforward neural network based on ant colony algorithm [J].Journal of Harbin Institute of Technology, 2003, 35(7): 823-825.(in Chinese) 17 SANGER T D.Optimal unsupervised learning in a single-layer linear feedforward neural network [J].Neural Networks,1989, 2(6):459-473. 18 GB H, H Z, X D, et al.Extreme learning machine for regression and multiclass classification [J].Systems, Man, and Cybernetics, Part B: Cybernetics, IEEE Transactions on, 2012, 42(2):513-529. 19 李晓磊.一种新型的智能优化方法-人工鱼群算法[D].杭州:浙江大学, 2003. LI Xiaolei.A new intelligent optimization method-artificial fish swarm algorithm [D].Hangzhou: Zhejiang University, 2003.(in Chinese) 20 王联国, 施秋红.人工鱼群算法的参数分析[J].计算机工程, 2010, 36(24):169-171. WANG Lianguo, SHI Qiuhong.Performance analysis of artificial fish swarm algorithm [J].Computer Engineering, 2010, 36(24): 169-171.(in Chinese) 21 陶秋香, 张连蓬, 李红梅.植被高光谱遥感分类中训练样本的选择方法[J].国土资源遥感, 2005, 17(2):33-35. TAO Qiuxiang, ZHANG Lianpeng, LI Hongmei.Characteristics of training samples in vegetation hyperspectral remote sensing classification [J].Remote Sensing for Land and Resources, 2005, 17(2): 33-35.(in Chinese) OptimizationofELMClassificationModelforRemoteSensingImageBasedonArtificialFish-swarmAlgorithm LIN Yi1JI Haowei1NICO Sneeuw2YE Qin1 (1.CollegeofSurveyingandGeo-Informatics,TongjiUniversity,Shanghai200092,China2.SchoolofAerospaceandGeodesy,UniversityofStuttgart,Stuttgart70173-70619,Germany) As a new means of earth resource survey, land use change and coverage (LUCC) and ecological environment monitoring, remote sensing technology has a great advantage.The automatic classification for remote sensing image is the key technology to extract rich ground-object information and monitor the dynamic change of LUCC.Machine learning can flexibly build a model portrayed by parameters, and automatically extract information, which has been widely used in image classification because of its good robustness and convergence, and easy to be combined with other methods.Based on the study of traditional extreme learning machine (ELM) theory, the optimal selection of kernel function parameters and regularizing parameters were performed by using artificial fish swarm algorithm (AF) and the optimal ELM image classification model (AF-ELM) was constructed.The classification model used AF to optimize the wavelet kernel parameters and regularizing parameters of ELM to improve the classification accuracy.After that the classification for multi-spectral remote sensing image was implemented by using the parameter-optimized ELM classifier, meanwhile, compared with some standard classifier such as artificial neural networks(ANM), support vector machine (SVM) and extreme learning machine (ELM), and it was comparatively analyzed with the ELM polynomial kernel and RBF kernel classification algorithm.The experiments proved that optimal AF-ELM classifier was more faster and accurate, which was superior to those before-mentioned classifiers.It can be used for the automatic extraction of various elements from remote sensing image. extreme learning machine; fish swarm algorithm; image classification; wavelet kernel function; remote sensing image; optimization 10.6041/j.issn.1000-1298.2017.10.019 TP79; F301.23 A 1000-1298(2017)10-0156-09 2017-06-14 2017-08-16 国土资源部公益性行业科研专项(201211011)和上海市科学技术委员会科研计划项目(13231203602) 林怡(1970—),女,副教授,博士,主要从事摄影测量与遥感研究,E-mail: linyi@tongji.edu.cn
2 结果与讨论








3 结论
猜你喜欢
电子制作(2019年23期)2019-02-23
自动化学报(2018年2期)2018-04-12
北京航空航天大学学报(2017年6期)2017-11-23
中外文摘(2017年19期)2017-10-10
电子技术与软件工程(2017年14期)2017-09-08
计算机应用(2017年4期)2017-06-27
制造技术与机床(2017年4期)2017-06-22
中国篆刻·书画教育(2017年5期)2017-06-08
湖南大学学报·自然科学版(2014年3期)2014-12-30
航天返回与遥感(2014年5期)2014-07-31