Buck变换器的改进电流控制模式研究
2017-11-23 08:10钱叶册时国平
宿州学院学报 2017年10期
钱叶册,时国平,孙 佐
池州学院机电工程学院,池州,247000
Buck变换器的改进电流控制模式研究
钱叶册,时国平,孙 佐
池州学院机电工程学院,池州,247000
为了提高Buck变换器控制系统的可靠性和动态性能,在传统电流控制模式基础上提出一种改进的电流控制模式。该控制模式采用电压、电流双闭环控制,再增加电压前馈的控制环节。建立了Buck变换器的闭环控制系统模型,并对控制系统电压环和电流环的传递函数进行了推导,设计了系统的补偿网络。对Buck变换器控制系统在传统电流控制模式和改进控制模式下进行的负载电流扰动实验进行比较,验证了在改进控制模式下可取得更好的动态响应。
Buck变换器;动态性能;闭环控制
1 问题提出
开关电源在人们生活中的应用正朝着集成高和精度高方面发展,这就对开关电源的变换器控制要求越来越高。本文以Buck变换器为研究对象,在传统电流控制模式基础上提出一种改进的变换器控制模式,提高了系统的可靠性和动态性能,确保产品适应不同的工作环境和客户使用要求[1]。
电流控制模式主要有峰值电流模式控制和平均电流模式控制。前者主要以一个开关周期内电流的峰值为控制对象,特点是动态响应速度较快,稳定性不够;而后者主要以一个开关周期内电流的平均值为控制对象,特点是稳定性高,但动态特性不够好且控制较复杂[2-3]。针对以上问题,文献[4]提出了电荷控制模式,特点是开关噪声小,可以控制开关电流的平均值,缺点是稳定性受输入电压及负载的影响较大。文献[5]提出了滑模变结构控制模式,优点是系统具有很快的响应速度,但电路设计复杂,且变结构控制固有的抖动问题难以解决。文献[6]提出了模糊自适应控制模式,优点是不需要掌握被控对象的精确模型,对过程参数的变化具有较强的适应性,但控制电路成本高,且控制规则需要长时间的积累。
本文提出的改进电流控制模式采用以输出电压和电流为对象的双闭环控制,再引入电压前馈控制环节。电压负反馈可以消除电压外环包含的前向通道上的所有扰动,电流负反馈可消除电流内环包含的前向通道上的所有扰动;当输入电压扰动时,利用系统电压前馈控制环节,可以实时对输入电压变化进行调节[7-8]。因此,本文所设计的模式控制具有电压负反馈、电流负反馈和电压前馈三个环节同时调节的作用,保证控制系统更加迅速、稳定。
2 Buck变换器控制系统的建模
图1为Buck 变换器等效电路。在分析Buck 变换器改进控制算法之前,要作一些条件假设:①Buck变换器工作状态为电感电流连续(CCM)模式;②变换器主电路各个元件均为理想元件;③变换器的开关频率远大于输入电压的频率[9-10]。
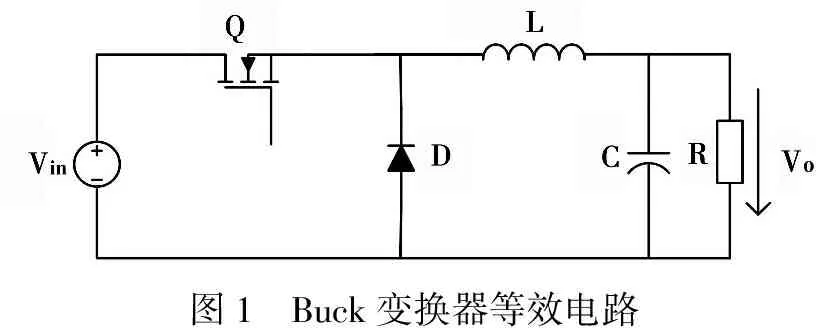
图1 Buck变换器等效电路
由图1可知,当开关管Q工作在通态时,电感电流iL表达式为:
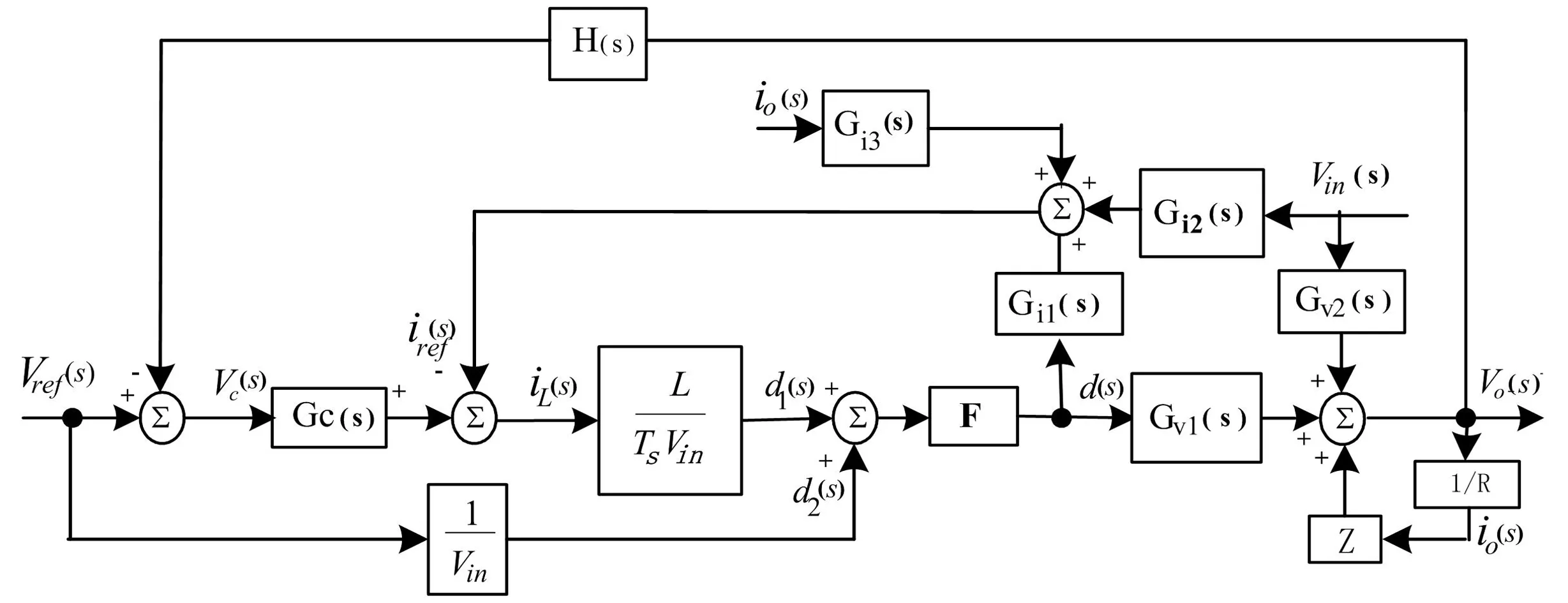
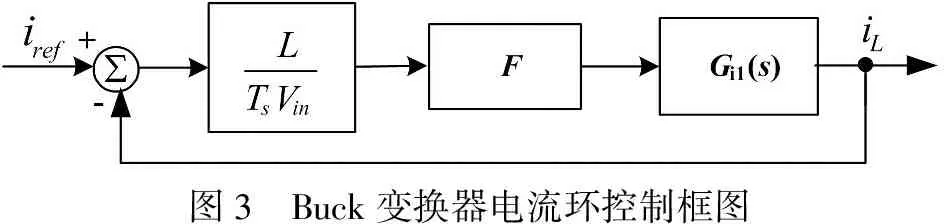
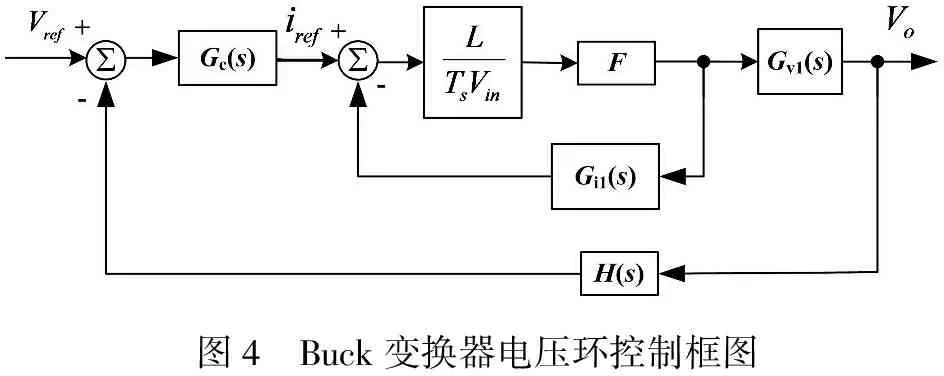
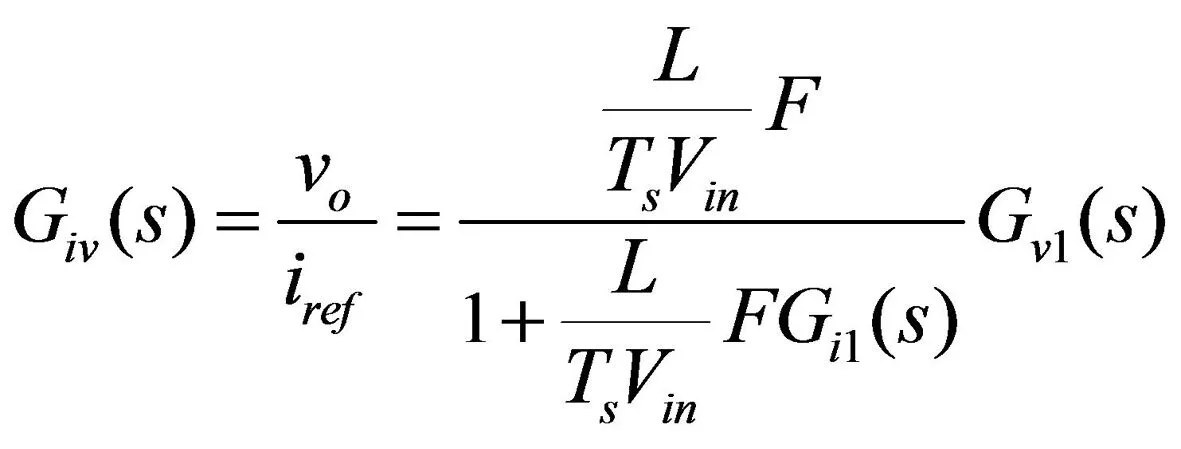
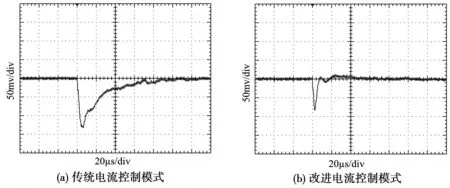
t(k)≤t (1) 当开关管Q关断时,电感电流iL可以表示为: t(k)+d(k)·Ts≤t (2) 其中,t(k)表示开关管工作在第k个开关周期的起始时刻,t(k+1)表示开关管工作在第k个开关周期的终了时刻,d(k)表示开关管工作在第k个开关周期时的控制占空比,Ts表示开关管的开关周期值[11-12]。 在Buck 变换器电流闭环控制环节,第k个开关周期末的电感指令电流iref(k+1)决定第k个开关周期末的电感电流iL(k+1)大小;在Buck 变换器电压闭环控制环节,电压指令值Vref决定输出电压vo大小。因此,在开关管占空比的表达式中,iL(k+1)和vo可以用iref(k+1)和Vref替代: (3) 对式(3)所示的占空比进行小信号扰动,可得: (4) 由式(4)得: (5) (6) (7) 由上面推导可知,Buck变换器的闭环控制系统模型如图2所示。 图2 Buck变换器闭环控制系统模型 由图2可知,通过建立Buck变换器的占空比与系统输入电压和负载电流扰动之间的关系,采用输出电压负反馈、电感电流负反馈以及输入电压前馈三个环节,对占空比进行实时调节控制,来实现维持系统输出电压的平稳。 (1)当负载电流io发生正向扰动时,输出电压Vo(s)减小,经过H(s)反馈后与Vref(s)比较,所得的差值Vc(s)增大,经过补偿网络Gc(s)后,与参考电流量iref之间差值也增大,使得占空比电流控制项d1增大,从而使Buck变换器的占空比d增大,输出电压增大,维持输出电压恒定,进而使发生跃变的电流回复初始平稳状态。当负载电流io发生负向扰动时,与上述过程刚好相反,最终也能维持系统输出电压的平稳。 (2)当输入电压Vin发生正向扰动时,经过传递函数Gi2(s) 使参考电流量iref增大,电感电流iL减小,占空比电流控制项d1也减小。同时,系统通过电压前馈的控制,使占空比电压控制项d2减小,占空比实时响应输入电压的跃变,使Buck变换器的占空比d减小,输出电压减小,从而维持输出电压恒定,使发生跃变的电流回复初始平稳状态。当负输入电压Vin发生负向扰动时,与上述过程刚好相反,最终也能维持系统输出电压的平稳。系统采用电压前馈的控制方法,占空比实时响应输入电压的跃变,因此系统具有较好的输入动态特性[13-15]。 由Buck变换器闭环控制系统模型可知系统电流环控制环节,如图3所示。 图3 Buck变换器电流环控制框图 由图3可知,系统电流环控制环节传递函数为: (8) 由Buck变换器闭环控制系统模型可知系统电压环控制环节,如图4所示。 图4 Buck变换器电压环控制框图 由图4可知,系统电压环控制环节的传递函数为: (9) Buck变换器的补偿网络设计如下: (11) 补偿后参考电流对输出电压开环传递函数为: (12) 为了验证Buck变换器控制系统具有良好的动态响应特性,设计了改进电流模式控制系统和传统峰值电流模式控制系统,分别作负载电流正跃变和负载电流负跃变两种情况对比实验。负载电阻R=2.5 Ω,输出负载电流为10 A。输出电压稳定后,通过负载跳变电路将负载电阻增加为5 Ω,负载电流变为5 A,即实现了负载电流的负跃变。同理,通过负载跳变电路将负载电阻由5 Ω减小为2.5 Ω,即负载电流由5 A跃变为10 A,实现了负载电流的正跃变。 当负载电流发生负跃变由10 A跃变为5 A时,由图5(a)可知,在传统电流模式控制下,输出电压超调量为128 mV,恢复时间为120 μs。由图5(b)可知,在改进电流控制模式下,输出电压超调量为52 mV,恢复时间为54 μs。改进电流控制模式的超调量和恢复时间都小于传统电流模式控制。 图5 Buck电路的负载电流负跃变实验波形 当负载电流发生正跃变由5 A跃变为10 A时,由图6(a)可知,在传统电流控制模式下,输出电压欠调量为130 mV,恢复时间为128 μs。由图6(b)可知,在改进模式控制下,输出电压欠调量为82 mV,恢复时间为44 μs。改进电流控制模式的超调量和恢复时间都小于传统电流控制模式。 图6 Buck电路的负载电流正跃变实验波形 本文介绍了一种Buck变换器改进电流控制模式,采用电压、电流双闭环控制,再增加电压前馈的控制环节,既保留了传统电流控制模式的优点,又可以使控制电路的调节器根据扰动的性质和大小进行控制以补偿扰动的影响,对于时延大、扰动大而频繁的电路具有良好的动态响应和负载调整率。 [1]丁世宏,王加典,黄振跃,等.Buck变换器扰动补偿控制算法及实现丁世宏[J].农业工程学报,2015,31(8):214-220 [2]刘松斌,高建海.基于峰值电流模式的同步Buck变换器的数字控制[J].现代电子技术,2015,38(9):121-124 [3]王靓华,岳继光,苏永清.平均值电流控制型B u ck变换器控制系统的设计[J].电源技术,2013,137(12):2225-2228 [4]Sahin M E,Okumus H I.Fuzzy logic controlled parallel connected synchronous Buck DC-DC converter for water electrolysis[J].IETE Journal of Research,2013,59(3):280-288 [5]万晓凤,谌新,余运俊.基于滑模变结构控制的级联式双向DC/DC变换器[J].电源学报,2014,12(5):97-104 [6]冯成臣,杨旭红,王严龙,等.模糊PI智能优化控制在Buck电路中的应用研究[J].电测与仪表,2015,52(5):73-77 [7]赖联有,陈仅星,许伟坚.Boost开关电源设计及仿真[J].江西理工大学学报,2010,31(2):29-32 [8]桑绘绘,杨奕,沈彩琳.基于PID控制的Buck变换器仿真系统设计[J].南通大学学报,2011,10(1):24-28 [9]吴超,陈博,曾程.基于双闭环控制的降压型DC/DC转换器仿真[J].武汉理工大学学报,2011,33(5):728-734 [10]杨航,刘凌,阎治安.双闭环Buck变换器系统模糊PID控制[J].西安交通大学学报,2016,50(4):35-40 [11]刘晓东,葛玲,方炜,等.Buck-boost变换器线性与非线性复合控制[J].电机与控制学报,2014,18(11):106-111 [12]骆秀秀,杨超,余岱玲.Buck变换器的变论域模糊自适应PID控制的研究[J].工业控制计算机,2016,29(2):48-52 [13]赖联有.一种Boost变换APFC电路的设计与仿真[J].江西理工大学学报,2012,33(1):56-59 [14]夏兴国,陈乐柱,潘小波.基于小信号模型的新型Buck变换器补偿网络设计[J].重庆工商大学学报,2016,33(1):52-58 [15]叶强,王泽宇,来新泉.峰值电流模BUCK变换器的建模及稳定性设计[J].华中科技大学学报:自然科学版,2014,42(2):31-34 (责任编辑:刘小阳) 10.3969/j.issn.1673-2006.2017.10.027 2017-06-18 安徽省教育厅自然科学研究重点项目“微电网电能质量主动控制策略的研究”(KJ2017A577);安徽省教育厅质量工程项目“电气工程及其自动化专业综合改革试点”(2014zy077)。 钱叶册(1972-),安徽枞阳人,硕士,讲师,研究方向:电力电子技术。 TM46 A 1673-2006(2017)10-0103-04

3 Buck变换器闭环控制的传递函数

4 动态扰动实验

5 结 论
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06测控技术(2018年2期)2018-12-09测控技术(2018年1期)2018-11-25通信电源技术(2018年5期)2018-08-23电子制作(2018年11期)2018-08-04电测与仪表(2016年6期)2016-04-11电测与仪表(2015年16期)2015-04-12电测与仪表(2015年3期)2015-04-09电机与控制应用(2015年7期)2015-03-01电测与仪表(2014年13期)2014-04-04