
基于双目视觉的桥梁检测无人机两轴云台设计与实现
2017-11-30 21:22王雨峰
中国新技术新产品 2017年24期
关键词:无人机
王雨峰

摘 要:随着航拍和遥感技术的发展,无人机应用技术得到快速发展,并在众多领域取得广泛应用。采用无人机桥梁检测辅助常规检测,可有效提高桥梁检测效率,并保证检测数据的准确性和持久性。本文针对桥梁检测的特殊需求,采用双目视觉技术替代传统单目测量,提高测量精度;设计两种新型云台,实现无人机悬停桥梁底部,垂直向上拍摄的工程需求,并实验对比两种云台的综合性能。
关键词:双目视觉;桥梁检测;无人机;云台设计
中图分类号:TP49 文献标识码:A
0.引言
桥梁是我国交通重要的基础建设工程,关乎社会与经济的和谐发展。桥梁建设的投入巨大,因此保障桥梁安全耐用至关重要。桥梁检测是桥梁管理的基本工作,常规的检测手段主要是依靠肉眼观察或桥检车、望远镜等辅助工具,对桥梁主要构件进行检查,以便及时发现桥梁开裂破损、露筋锈蚀、支座脱空等病害。
随着航拍技术、遥感技术的不断发展,无人机应用技术作为一门新兴的综合性技术,在我国国防建设、地质勘测、电网巡视、高速公路巡查、气象检测、森林防火、海事巡逻等军用与民用技术领域获得广泛应用,成为提高效率和提升产业规模水平发展的重要工具。无人机根据其结构分为固定翼、直升机和多旋翼三大类。多旋翼无人机因平稳性好、结构简单及性价比高等优势成为无人机桥梁检测的首选。采用无人机桥梁检测,不仅解决了传统桥梁检测费钱耗时、难度大、危险系数高等难题,而且保证了检测数据的准确性和持久性,提高桥梁检测效率。
桥梁底部由于受力不均、风雨侵蚀,最容易发生破损开裂的病害,因此桥梁检测中需要测量破损开裂的面积和裂缝长度宽度等,涉及不规则形状的精确计算,且精度需达到0.1mm。除了人工测量外,基于机器视觉的测量技术得到研究与应用。目前无人机搭载单目高清摄像头,受云台限制,只能向下或侧面拍摄。而实际检测中,需要无人机悬停于桥梁下方,垂直向上拍摄桥梁底部大面积病害情况,以便做到精确计算。
1.基于双目视觉技术的桥梁裂缝测量系统
传统单目拍摄及图像处理是基于二维平面的计算方法,而摄像头拍摄的图像仅仅是真实物体的平面投影,存在较大的误差。为满足桥梁检测中0.1mm的精度要求,基于双目视觉技术测量系统,通过模拟人眼观察,还原物体的空间真实尺寸,进而有效保证测量的精度。
1.1 双目视觉技术工作原理
双目视觉技术是仿照人眼观察原理、利用两个摄像头,从不同角度同时获取同一目标图像,通过计算目标在图像的视差获取目标的准确三维坐标值。
平行放置的双目视觉模型是最理想的,如图1所示。其中,OL、OR分别是左右两个摄像头的坐标系原点,又称光心,ZL、 ZR是光轴;光心之间连线为基线,长度为b;摄像头成像平面的原点与其光心距离为焦距。理想模式中,两摄像头完全相同,焦距为f,光轴平行。由此建立三角几何对应关系为:
(1)
其中, (xw,yw,zw)为目标P点的坐标。记 d=xl-xr,即为 P点的双目视差。由此可知,只要得到空间任意点在左右两个摄像头成像平面上的图像坐标、焦距和基线,即可求得目标点的三维空间坐标。
1.2 桥梁裂缝测量系统组成
基于双目视觉技术的桥梁裂缝测量系统由图像采集、处理和计算组成,利用两个CCD相机获取桥梁底部图片,运用计算机处理自动识别出裂纹图像,并对分离出来的裂纹进行计算获取三维点坐标,从而实现更加精确的计算。相比传统人工测量,具有更加快捷安全、直观精确、灵活性高、成本低廉等优点,具有较好应用前景。
方案选用CC3D飞控操作QAV250机架的小型无人机,将两个700线高清摄像头,以中心距10cm固定在云台上,摄像头垂直向上,满足桥梁底部拍摄要求;搭载两套5.8G图传和RC832接收机同时采集两个摄像头拍摄的图像。双目相机需经过标定才能保证精度,其标定过程就是确定三维空间点到二维平面点的映射矩阵的过程。
所采集图像需进行预处理,包括图像压缩、图像去噪、图像增强。经过处理后的图像,可清晰呈现裂缝。通过对同一组图像中裂纹宽边或左右像素点进行匹配,可计算空间两点的三维坐标(X,Y,Z)和(U,V,W) 。进而根据三维欧氏距离公式:
(2)
计算两点之间距离。
2.无人机两轴云台设计
无人机的安全性、稳定性、可操作性是航拍基础;相机的画质直接影响航拍的作品,两者缺一不可。由于无人机飞行姿态变化、自身的震动以及外界气流扰动都会影响到成像质量,又受限于无人机的载重与功耗,因此必须选用重量轻、结构简单的云台,以稳定视轴、隔离干扰,保证桥梁检测精度。
2.1 云台系统总体设计
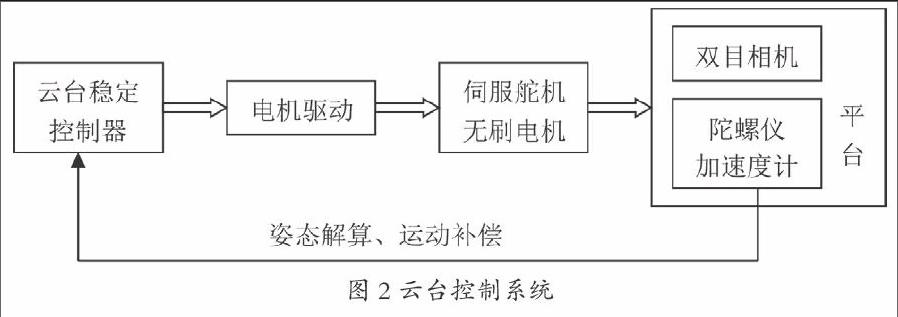
如图2所示,云台系统由控制器、姿态反馈元件、执行元件以及框架结构4个部分组成,采用64引脚LQPF封装的TMS320F28035作为主控芯片,集成有三轴陀螺仪、三轴加速度计的惯性传感器MPU6050作为姿态反馈,分别选用伺服舵机和2204无刷电机,与L6234电机驱动器组成执行元件。
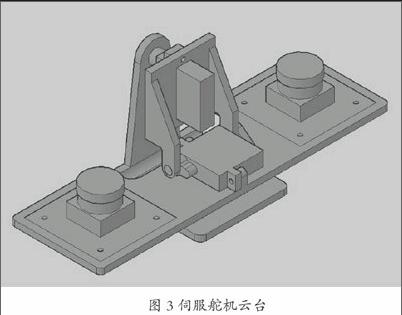
如图3和图4所示,根据桥梁检测特殊需求,设计了伺服舵机云台和无刷电机云台。云台由俯仰和横滚两轴组成,整体重点较低,具有一定自稳特性;底座采用减震球与机身相连,减少机身震动对云台的影响;相机平台以中心距10cm固定两个高清摄像头,同时固连姿态反馈元件。
2.2 驱动选择
根据云台功能实现需要可选择伺服舵机、步进电机、直流无刷电机,其中伺服舵机驱动简单、质量轻、体积小、驱动力矩大,是普通云台的首选;而相同质量的进步电机由于力矩太小,较少使用;直流无刷电机随着技术发展,体积越来越小,逐渐应用于新型云台。
舵机由电子控制电路板、空心杯电机、减速齿轮组和旋转电位计组成,其中空心杯電机具有转动惯量小的优点,即传动顺滑,可保障云台稳定过程中精确控制;而减速器由于齿轮间存在间隙,会造成回差影响稳定效果,因此需选用精度较高的减速齿轮。此外可将舵机控制电路隔离,直接连接至云台控制,以提高控制频率。endprint
2204无刷电机型号为MY-2813C,其定子直径22mm,定子厚度4mm,槽数12,极数14,重量22g。无刷电机中定子绕组产生的每个磁场矢量与转子空间位置对应,因此根据转子空间位置,控制相应绕组相电流大小和方向,产生磁场矢量,以补偿转子随机体的运动,从而使其空间位置固定。
2.3 框架结构的3D打印
本文设计的云台框架结构是目前市面无法购买的,为了实现质量轻、结构合理、强度适宜的要求,所以采用3D打印进行定制。3D打印实现周期短、成本低、柔性制造、所见所得和高度集成化等优势,让三维设计模型直接到样件的原型产品,大大缩短制造时间和成本。此外,3D打印技术为云台造型优化和尺寸变化、摄像头及电机的更换提供了无限可能,根据无人机尺寸和载荷变化,设计更合理的云台,提高稳定性,保证测量精度。
2.4 云台运动补偿控制器
无人机在飞行中不可避免对云台造成影响,因此需运用运动补偿控制器加以补偿。
定义机体坐标系 obxbybzb,相机云台中心坐标系ocxcyczc,两图像平面中心坐标系oiyizi。无人机机体角速度 与引起的云台姿态角速度 间的关系为:
根据工程需要,二自由度云台系统满足桥梁检测的要求,可作俯仰和横滚运动,故当目标相对两图像中心位置偏差 时,为了使其处于两图像中心位置,云台应该调节的角度:
利用无人机自身的姿态感应装置感知机体角速度,設采样间隔为 Δti,可得云台控制系统误差为:
最后把无人机的速度和角速度作为云台控制器的输入,引入PID云台稳定控制器。通过 PID 控制算法得到控制量驱动相应轴的电机转动,隔离载体的角运动,稳定云台,为目标标定和拍摄提供可靠的保证。
3.实验对比
通过模拟桥梁检测的飞行实验,两种云台设计方案均能较好地满足工程需求,从云台的转动速度、转动角度、载重、环境指标、回差和可靠性等方面进行对比,结果见表1,可知伺服舵机云台结构强度好、力矩大,适用于大中型无人机,以承载更重的高清相机;而无刷电机云台结构简单、无机械回差,适合于小型无人机,搭载微型高清摄像头。
表1 两种云台性能对比
类型 伺服舵机云台 无刷电机云台
转动速度 力矩大,转动速度快 转动速度固定,较稳定
转动角度 满足飞行中调节的需要,但受限于相机云台尺寸和距机身的距离
载重 载重大,受限舵机齿轮连接处 载重小,受限电机螺栓连接处
环境指标 电机内置,可防尘防水 电机外露,需谨防雨雾侵蚀
回差 回差在启动或停止时较大 无机械回差
可靠性 可靠性良好,均能满足实验需要
结语
随着无人机技术的不断发展,基于双目视觉的无人机桥梁检测系统提高了测量精度,同时新的云台设计满足桥梁底部垂直向上拍摄的需求,通过运动补偿保障了云台平稳转动和图像采集的清晰。因此,无人机将会越来越多的应用于桥梁检测,成为未来桥梁管理重要补充手段,极大提高桥梁检测的效率,维护桥梁结构安全,确保桥梁经久耐用。
参考文献
[1]彭玲丽,黄少旭,张申申,等.浅谈无人机在桥梁检测中的应用与发展[J].交通科技,2015(6):42-44.
[2]陈显龙,陈晓龙,赵成,等.无人机在路桥病害检测中的设计与实现[J].测绘通报,2016(4):79-82.
[3]庞娜,赵启林,芮挺,等.基于机器视觉的桥梁检测技术现状及发展[J].现代交通技术,2015,12(6):25-31.
[4]刘晶晶.基于双目立体视觉的三维定位技术研究[D].华中科技大学,2007.
[5]王琳. 基于双目立体视觉技术的桥梁裂缝测量系统研究[D].上海交通大学,2015.
[6]孟恭.无人机视觉稳定云台系统设计[D].哈尔滨工程大学,2012.
[7]杨润,闫开印,马术文.小型无人机机载两轴云台设计与实现[J]. 自动化与仪器仪表,2014(7):165-167+171.
[8]吴复尧,邱美玲,王斌.3D打印无人机的研究现状及问题分析[J]. 飞航导弹,2015 (10):20-25.
[9]罗秋凤,肖前贵,杨柳庆.无人机自动检测系统的设计与实现[J]. 仪器仪表学报,2011,32(1):126-131.
[10]李湘清,孙秀霞,彭建亮,等. 基于运动补偿的小型无人机云台控制器设计方法[J]. 系统工程与电子技术,2011,33(2):376-379.endprint
