基于MATLAB的线性控制系统稳定性仿真研究
2017-12-08 10:30费旻林怀蔚邢玮李云海
科技资讯 2017年30期
费旻++林怀蔚++邢玮++李云海

DOI:10.16661/j.cnki.1672-3791.2017.30.034
摘 要:稳定性是保证控制系统正常工作的先决条件。为了判断线性控制系统的稳定性,在MATLAB/Simulink仿真环境下,利用MATLAB软件中的Simulink模块组合方式建模,可以准确地创建动态系统的仿真模型。本文通过实例对线性控制系统进行稳定性仿真研究,分析过程简单、快捷,结果准确可靠,充分体现了MATLAB/Simulink仿真方便和直观的特点,其创新点在于利用MATLAB/Simulink对线性控制系统进行稳定性仿真研究,验证了其稳定理论的有效性和真实性。
关键词:线性控制系统 稳定性 MATLAB/Simulink 仿真
中图分类号:TP391.9 文献标识码:A 文章编号:1672-3791(2017)10(c)-0034-03
自动控制系统是由控制器和被控对象按照一定的方式连接起来、完成一定自动控制任务的有机整体,尽管其实现的功能不尽相同,但任何控制系统要使其按照预期目标实现其功能,都必须以系统稳定为首要条件。稳定性是指系统重新恢复平衡状态的能力,它是保证控制系统正常工作的先决条件。理论上判断一个控制系统稳定性的方法有很多,按照传统方法判断控制系统的稳定性,不但计算工作量大、效率低,而且不够直观,缺乏有力的输出图形支撑。随着计算机科学技术的发展,各种功能强大的系统仿真软件在自动控制领域得到广泛应用,其中,最为典型的代表就是MATLAB仿真软件,它是目前国际最流行、应用最广泛的科学与工程计算软件。
Simulink是基于MATLAB框图设计环境实现动态系统建模、仿真和分析的软件包,是MATLAB中一种可视化仿真工具,被广泛应用于各种控制系统的建模、仿真和分析中。本文介绍了基于MATLAB/Simulink仿真环境下,通过单位阶跃信号作用,利用仿真实例对线性控制系统进行稳定性仿真研究,直接观察和分析系统个别参数变化对系统稳定性的影响,充分体现了利用MATLAB/Simulink实现仿真方便和直观的特点。其创新点在于利用MATLAB/Simulink对线性控制系统进行稳定性仿真研究,验证了其稳定理论的有效性和真实性。
1 线性系统的稳定性
1.1 稳定性的概念
控制系统能在实际中应用,其首要条件是保证系统稳定。原来处于平衡状态的系统,在受到扰动作用后都会偏离原来的平衡工作状态,产生初始偏差。所谓稳定性,就是在扰动作用消失后,系统能否由初始偏差状态回到原来的平衡状态的性能。若系统能恢复到原来的平衡状态,则称系统是稳定的;反之,偏差越来越大,则系统是不稳定的。
稳定性是系统的固有特性,是扰动消失后系统自身的恢复能力。稳定性只由系统本身的结构、参数决定,而与系统的初始条件以及外作用无关。
1.2 线性系统稳定的充要条件
线性定常系统的特性可由线性微分方程来描述,而微分方程的解通常就是系统输出量的时域表达式,它包括稳态分量和暂态分量两个部分。稳态分量对应微分方程的特解,与外作用形式有关;暂态分量对应微分方程的通解,是系统齐次方程的解,它与系统的结构、参数以及初始条件有关,而与外作用形式无关。由上述稳定性概念可知,研究系统的稳定性,就是研究系统输出量中暂态分量的运动形式,这种运动形式完全取决于系统的特征方程式。根据理论推导,线性控制系统稳定的充分必要条件是系统特征方程的所有根均为负实数或具有负的实部。
1.3 线性系统的稳定判据
根据线性系统稳定的充要条件,要判断一个系统是否稳定,需要求出系统特征方程的全部特征根,这对于低阶系统容易取得,但对于三阶以上高阶系统,求系统的特征根比较困难。于是,对于高阶系统,判断系统稳定与否可采用代数稳定判据,它只要根据特征方程的系数便可判别出特征根是否具有负实部,从而判断出系统是否闭环稳定,常用的代数稳定判据主要有赫尔维茨稳定判据、林纳德-齐帕特判据和劳斯判据等。利用代数稳定判据还可确定系统个别参数变化对系统稳定性的影响,从而给出使系统稳定的参数取值范围。
2 线性控制系统稳定性仿真研究
2.1 仿真实例及其稳定性判别
2.1.1 仿真实例
在CDIO模式下的“自动控制原理”课程实践教学实例中,一串级直流电动机速度控制系统结构如图1所示,其开环传递函数为:
其中,K为开环放大倍数;T为时间常数;给定时间常数T=0.1s,分析讨论输入单位阶跃信号时,不同开环放大倍数K对系统稳定性的影响。
2.1.2 仿真实例的稳定性理论判别
从系统的结构可知,系统闭环传递函数:
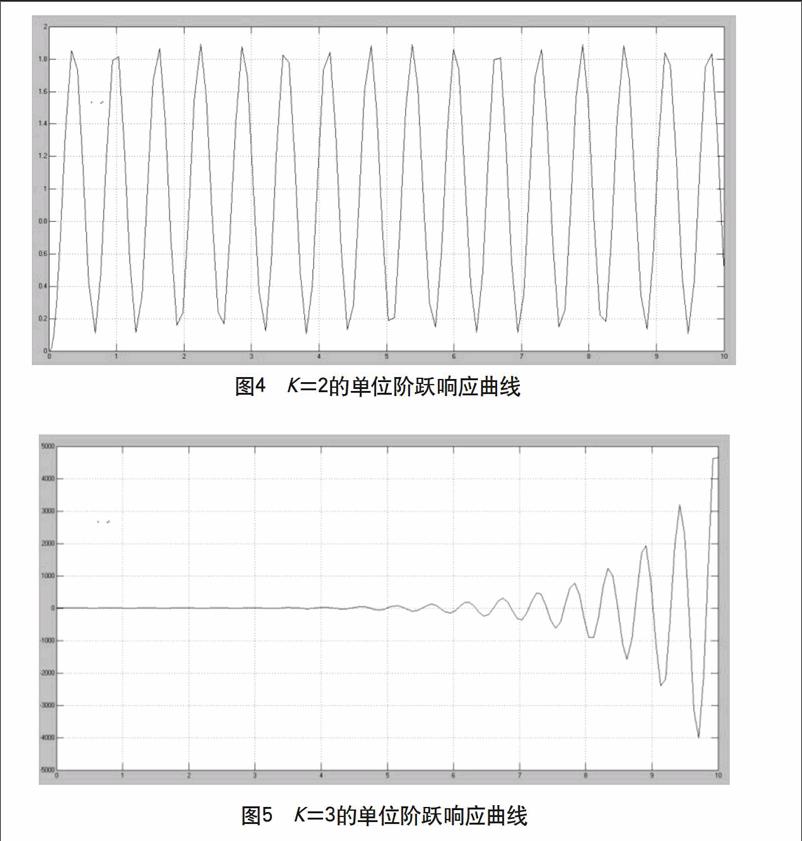
其特征方程为S3+20s2+100s=1000K=0,由劳斯判据易得:1000K>0,且20×100>1000K,联立求得系统稳定时K值的取值范围为0 可见,闭环系统的稳定性与系统开环放大倍数K值直接有关。当系统开环放大倍数K值增大时,系统相对稳定性变差;当系统开环放大倍数K值大于其临界值时,系统变为不稳定。 2.2 仿真实例模型构建 启动MATLAB 7.0.4,进入Simulink仿真界面,在create a new model中绘制控制系统仿真结构图如图2所示。根据要求,双击各传递函数模块,在出现对话框内设置相应参数,加入单位阶跃信号,设置起始时间为0s,对开环放大倍数K取不同参数值,点击Simulation菜单下start命令進行仿真,双击示波器模块得到系统输出响应曲线,观察、记录和分析仿真结果。 2.3 仿真结果及分析 (1)根据图2所示仿真结构,当K=1时,在单位阶跃信号作用下,仿真输出响应曲线如图3所示,系统开始呈现超调输出,伴随时间增加超调输出逐渐减小直至为0,调节时间为3s,在0 (2)根据图2所示仿真结构,当K=2时,仿真输出响应曲线如图4所示,系统输出呈现等幅振荡,系统为临界稳定状态,工程上为不稳定,仿真结果与理论分析一致。 (3)根据图2所示仿真结构,当K=3时,在单位阶跃信号作用下,仿真输出响应曲线如图5所示,系统开始呈现稳定状态,伴随着时间增加,系统一旦受到外界扰动,输出变为发散状态,在超出0 3 结语 通过对控制系统实例的理论分析和仿真可知,系统开环放大倍数K值越大,且越接近临界值,系统相对稳定性越差;当系统开环放大倍数K值大于临界值,系统变为不稳定。因此,增大系统开环放大倍数K值不利于闭环系统的稳定。 基于MATLAB/Simulink仿真环境下,通过Simulink软件包所提供的基本模块,不需任何硬件,在单位阶跃信号作用下,利用仿真实例完好地实现了对线性控制系统进行稳定性仿真研究,可直接观察和分析系统输出性能变化,验证了其稳定理论的有效性和真实性,在控制系统稳定性判断中具有很高的实用价值。 参考文献 [1] 罗斌,冯辉,唐义锋.MATLAB软件在系统稳定性分析与仿真中的应用[J].佳木斯大学学报:自然科学版,2010,28(4):530-533. [2] 李素玲.自动控制原理[M].西安:西安电子科技大学出版社,2007. [3] 王正林.Matlab/Simulink与控制系统仿真[M].北京:电子工业出版社,2005. [4] 李云海,邢玮,林怀蔚.基于Matlab/Simulink的二阶控制系统仿真研究[J].现代电子技术,2013,36(12):12-14. [5] 韩煦,韩玉安.基于Matlab的控压钻井压力控制建模方法[J].石油钻探技术,2017,45(3):67-71.
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
智富时代(2018年4期)2018-07-10
智富时代(2018年4期)2018-07-10
新农业(2018年3期)2018-07-08
电机与控制学报(2018年9期)2018-05-14
求知导刊(2017年22期)2017-10-13
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09