
基于双曲线模型的生物雷达二维定位算法
2017-12-23 08:16张自启张杨祁富贵刘淼王鹏飞殷悦史刚王健琪
中国医疗设备 2017年12期
张自启,张杨,祁富贵,刘淼,王鹏飞,殷悦,史刚,王健琪
第四军医大学 生物医学工程学院,陕西 西安 710032
基于双曲线模型的生物雷达二维定位算法
张自启,张杨,祁富贵,刘淼,王鹏飞,殷悦,史刚,王健琪
第四军医大学 生物医学工程学院,陕西 西安 710032
目前多通道生物雷达目标二维定位多采用多条圆弧相交的算法,该算法容易因单通道定位不准而造成圆弧无法相交于一点的情况。本文提出了在一种基于双曲线模型的目标二维定位方法,该方法利用其中两个通道信息所确定的双曲线并结合另一个通道信息所确定的圆弧对目标进行二维定位。自由空间实验和穿墙实验结果表明,该定位方法能在直角坐标系下较准确地确定目标的二维坐标,二维坐标与目标实际位置之间的平均误差在10 cm左右,从而验证了该实验方法的正确性和有效性。该算法计算简便,结果可靠,可以为实际搜救工作提供有效的指导。
生物雷达;超宽带;双曲线;定位;生命探测
引言
超宽带(Ultra-Wide Band,UWB)生物雷达是一种融合雷达技术和生物医学工程技术并以人体等生命体为探测目标的新型雷达,是用于地震、矿难、泥石流等灾害发生后失踪人员搜救的效率最高的技术手段之一[1-3]。生物雷达可以快速实现探测区域内生命体目标有无的判别和定位,为专业救援提供指导,从而提高搜救精度和效率。生物雷达的探测结果一般包括目标识别(目标有无判别和目标类型区分)和目标定位两个方面,其中目标定位是搜救现场最迫切需要的关键技术,也是目前没有很好解决的一个难点。如果能准确地估计出被困目标的实际位置,将能较好地集中有限搜救资源、极大提高救援效率。目前,二维定位一般采用多条圆弧相交的算法,该算法容易出现多个圆弧无法相交于同一点的情况[4]。因此,本文基于多通道便携式生物雷达平台,提出了一种基于双曲线模型的定位方法,并进行了单个目标的定位方法实验研究,结果表明该方法能够较准确地确定目标的二维坐标。由于遮蔽效应[5]等的存在,在目标定位技术中,多目标定位最具有挑战性也是目前的难题[6],本研究也为后续多目标定位难题的解决打下基础。
本文首先介绍了多通道UWB生物雷达和天线阵列设置,然后提出了一种新的基于双曲线模型的目标二维定位方法[7-11],并从理论上分析了其可行性,再通过自由空间实验、穿墙实验逐步检验了其效能并对实验结果进行了讨论。
1 多通道便携式生物雷达探测系统
本文采用的多通道便携式生物雷达系统由一发四收的UWB生物雷达天线、便携式多自由度可折叠支架和触控式远程控制处理器组成。
1.1 硬件组成
本实验采用的是低中心频率UWB脉冲体制生物雷达,其原理框图,见图1。系统由脉冲发生器产生脉冲信号,脉冲信号经整形电路后形成双极脉冲由垂直极化的蝶形天线发射出去,同时脉冲发生器所产生的脉冲信号被送入延时单元产生一系列距离门信号控制接收电路。接收天线接收到反射回波后,由距离门信号控制接收电路进行采样,再经过高速AD采样和Wi-Fi模块送入控制处理器[12]。
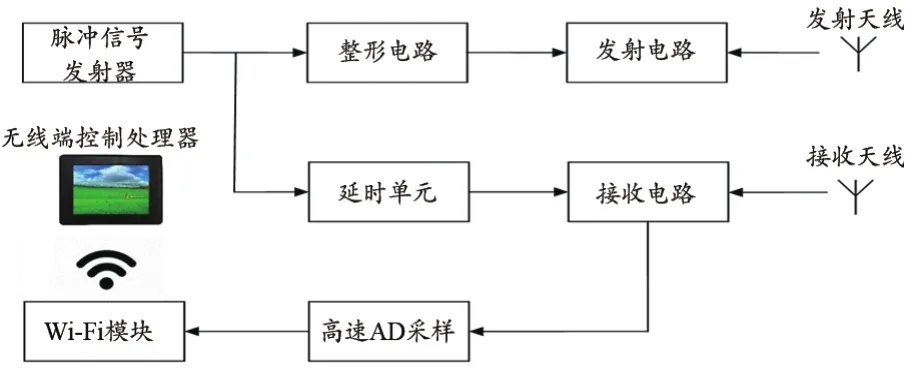
图1 UWB脉冲雷达原理框图
UWB雷达的中心频率为400 MHz,带宽为400 MHz,脉冲重复频率为128 kHz,每个通道的AD采样频率为64 Hz。
1.1.1 一发多收天线
本文采用的多通道生物雷达由两部分组成(图2):一部分是雷达主机,包括发射天线、雷达系统收发电路、无线通信模块以及电源等;另一部分是各自分立的4个接收天线,分别通过缆线与主机相连并通过该缆线将接收到的雷达回波传回主机。为了方便描述,从正对天线发射面的角度看,我们按照逆时针的方向将4个接收天线分别编号为0、1、2、3,其各自对应的通道也分别编号为0通道、1通道、2通道、3通道。

图2 一发多收天线阵列
1.1.2 多自由度天线支架
为适应废墟等复杂的探测环境,本文设计了多自由度可折叠式天线支架将各个接收天线与主机进行机械连接,同时将电缆线嵌入到折叠臂中实现接收天线与主机之间的电气连接。可折叠式支架收缩状态,见图3。在实验或实际探测中,可以根据需求自由调整折叠臂的长度、角度、天线探测方向等来形成灵活多样的天线阵探测模式。

图3 折叠式支架收缩状态
1.2 探测天线阵列
根据前面的研究成果[13],要实现目标平面上的二位定位,需要最少3个通道才能避免伪影的出现。因此,本文采用一发三收(接收天线采用0号、1号、2号)的天线组合,天线阵列近似为直线型。其中发射天线在主机内,将1号天线紧挨主机,置于主机上方;为确保较远距离的角度分辨率,将0号天线和2号天线的折叠臂伸展至最长,此时0号天线和2号天线与主机之间的中心距离均为1.08 m。因此发射天线与3个接收天线近似呈现出直线型分布阵列,见图4,此处用T表示发射天线,R表示接收天线,下标编号分别与图1相对应。其中图4b表示进行自由空间实验时雷达的架设方式,图4c表示进行穿墙实验时雷达的架设方式。

图4 直线型探测天线阵列
1.3 远程控制处理器
为了保证可靠性与软件系统的兼容性,采用微软公司生产的Surface系列触控平板电脑作为远程控制处理器。该系列平板电脑能很好地与Windows操作系统下开发的控制处理软件相兼容,实验还表明在与雷达相距30 m (自由空间)的情况下其仍然能和生物雷达前端保持稳定的通信。因此在实验的过程中,生物雷达的操作人员可以保持与雷达探测区域较远的距离以减少操作人员对雷达的干扰。
2 基于双曲线模型的目标二维定位实验
2.1 实验设计
2.1.1 探测目标的位置选取
为了更容易地描述目标点的位置,我们实验室地面上建立了直角坐标系。将实验场地划分为若干个边长为1 m的正方形格子,同时以生物雷达系统主机所在位置为坐标原点建立笛卡儿直角坐标系,以直线型探测天线阵列所在的直线为坐标轴的横轴,以垂直方向为坐标的纵轴,左侧标定的是该水平线与坐标横轴的纵向距离,上侧标定的是该纵线与坐标纵轴的横向距离,见图5。其中,图5a表示自由空间实验中的位置划分,受场地限制右侧的5、10、15、20、25等5个点的横坐标为x=1.7,其余各点的坐标均为整数值。即该区域是一个以(-2,0)、(1.7,0)、(-2,-6)和(1.7,-6)共4个点为顶点的矩形区域,对于图中所标定的25个点则很容易描述各自的位置。例如2点的坐标为(-1,0),3点的坐标为(0,-2)。另外,在进行穿墙探测实验时调换了实验仪器摆放的方向,如图5b所示,同样由于实验场地限制,左侧的1、6、11、16、21等5个点的横坐标为x=-1.7。实验时,被探测目标分别站在上述25个不同的位置点进行定位探测,对比探测结果与目标实际位置坐标以评价本文算法的目标定位能力。

图5 两种实验目标位置划分
2.1.2 自由空间和穿墙实验
本文计划从自由空间和穿墙两种不同的实验场景来检验定位方法的效能,先进行自由空间实验进行原理验证,再进行穿墙探测实验,从而逐步验证定位方法的合理性、正确性。两种实验场景,见图6。
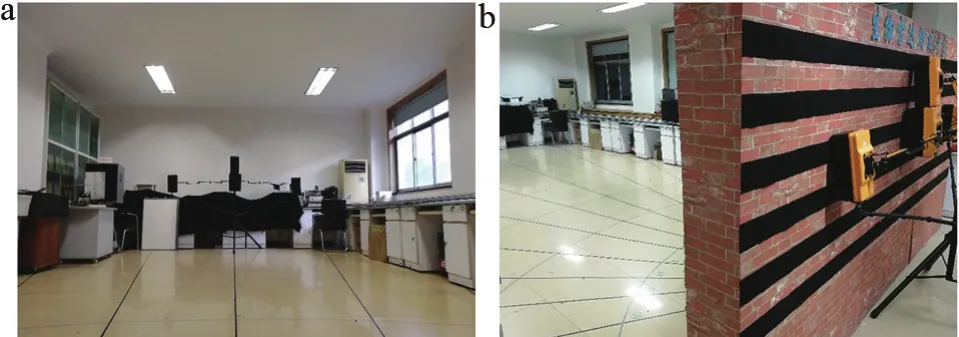
图6 两种实验场景
2.2 信号处理方法
2.2.1 雷达回波预处理
在对目标进行定位之前,需要对原始雷达回波进行预处理。雷达各通道的回波以脉冲形式采集,各个波形的采样点数均为2048点。为减少运算量提高运算效率首先对波形进行距离抽取,再进行低通滤波滤除高频噪声,最后通过滑动减平均、能量累积等处理方法以增强信噪比[14],为下一步的定位算法打下基础。雷达回波预处理的算法流程,见图7。

图7 雷达回波预处理流程
2.2.2 基于双曲线模型的定位方法
三通道生物雷达对人体目标进行探测定位的方式,见图8,其中紧挨主机的1号接收天线R1与发射天线T近似重合为一点,0号接收天线R0和2号接收天线R2与发射天线T之间的距离都为1.08 m且分别位于主机的左右两侧。雷达波从发射机发出后到达目标P所用的时间为τp,雷达回波经过目标P反射后回到3个不同通道接收机R0、R1和R2所用的时间分别为τ0、τ1和τ2,则有 :


图8 定位示意图
其中,c表示电磁波在介质中的传播速度。
若雷达波从发射机发出并经过目标P反射后回到3个不同通道接收天线R0、R1和R2的距离分别为L0、L1、L2。那么,|L0-L2|可以通过公式(5)获得。


其中,ch表示双曲线的半焦距,a表示双曲线的实半轴长,则双曲线的虚半轴长为根据实验中某一组数据所绘制的双曲线,见图9。目标实际坐标为(-1,-5),图5(a)中编号为17的点,实验测得L0=5.40 m,L1=5.19 m,L2=5.18 m,根据生物雷达探测到的L0与L2的大小即可绘制出下图的双曲线。图中所示的R2和R0即2通道和0通道接收天线所在的位置,二者也是该双曲线的两个焦点,目标P处在该双曲线的一支上。若L0>L2,则目标离R2更近,处在双曲线的左支即直角坐标系的第三象限,同理若L0<L2,则目标离R0更近,处在双曲线的右支即直角坐标系的第四象限。而目标的具体坐标则需要结合1通道的探测结果计算来确定。
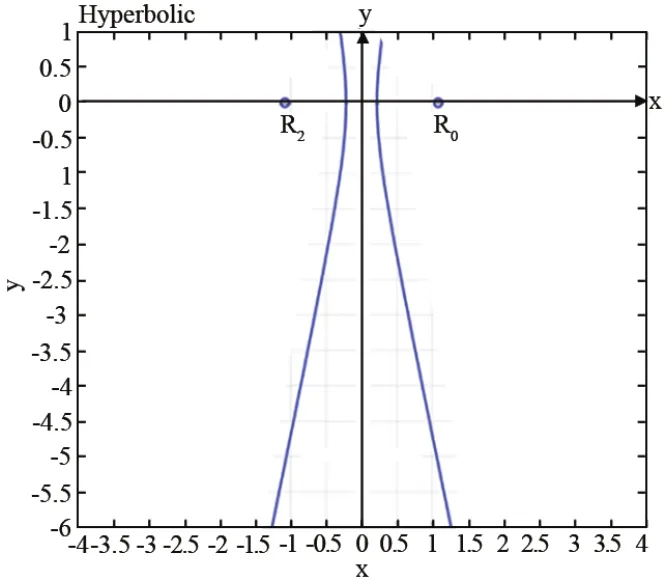
图9 由0通道和2通道所确定的双曲线
另外注意到,由于1通道的接收天线和生物雷达主机发射天线靠得很近,工程上可以近似认为τp=τ1,即等效的近似有所以,目标P同时还处在一个由1通道的接收天线所确定的圆上,则有:

其中,r为1通道的接收天线所确定的圆的半径。为了减小误差,一般不直接取而认为根据图9实验中的同一组数据所绘制的圆弧,见图10。目标实际坐标为(-1,-5)(图5a中编号为17的点),为了与图9的坐标范围一致图中只显示了一部分有实际意义的圆弧。
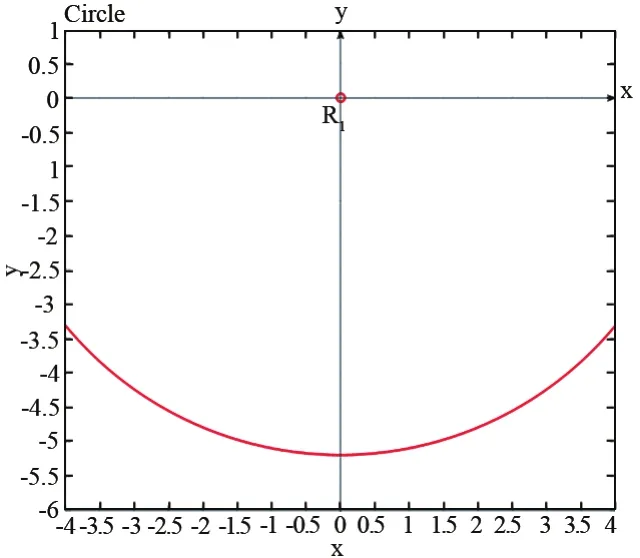
图10 由1通道所确定的圆弧
如果目标P既存在于一支双曲线上,又存在于一段圆弧上,那么这支双曲线和该圆弧的交点即为目标P的实际位置。因此,定位方法,见图11,在同一个直角坐标系中分别绘制出由0通道和2通道所确定的双曲线以及由1通道所确定的圆弧,找到两个曲线的交点则很容易对目标P进行二维定位。对于本示例中的数据,由于L0>L2,因此目标处在直角坐标系的第三象限,则追踪第三象限中两曲线的交点的坐标得(-1.056,-5.077),从而实现了对目标P的二维定位,该定位结果与目标实际位置(-1,-5)相比误差小,绝对误差不超过8 cm。

图11 基于双曲线模型的定位方法
2.3 实验结果
2.3.1 自由空间实验
为了检验基于双曲线模型的二维定位方法的效能,我们先进行了自由空间探测定位实验(图12)。目标按照图5(a)所示的位置划分分别站在25个不同的位置,用生物雷达进行探测,对采集到的数据进行上述雷达回波信号预处理,并按照本文提出的基于双曲线模型的二维定位方法进行定位。根据前文的约定,雷达波从发射机出发再经由目标P反射后回到各个不同通道接收天线的距离分别为L0、L1、L2,重新定义将实验结果整理,见表1,其中定位结果中的x和y分别表示根据基于双曲线模型的二维定位方法探测识别后目标的横坐标与纵坐标,|PP0|表示目标实际位置坐标与探测结果坐标之间的距离,即定位误差。

图12 自由空间实验
2.3.2 穿墙实验
灾害发生后,被困的幸存者往往会被废墟等障碍物压埋,所以在实际的灾后救援中通常需要穿透废墟等介质来探测生命信号,因此我们还进行了穿墙探测实验(图13),进一步验证这种基于双曲线模型的定位方法在穿透障碍物的情景下的有效性、正确性。目标按照图5b所示的位置划分分别站在25个不同的位置,用上述相同的方法进行定位,将实验结果整理,见表2。

表1 自由空间实验结果(m)

表2 穿墙场景实验结果(m)

图13 穿墙实验
3 结论
UWB生物雷达技术[15-16]是应用于灾后搜救的重要生命探测手段,生命探测技术的研究主要包括目标识别、目标定位等方面。其中,目标识别是基础,目标定位是重要的实战需求,综合二者才能为灾后的救援工作提供具有实际意义的指导意见。本文提出了一种基于双曲线模型的目标二维定位方法,综合3个不同通道的信息估计出目标的二维坐标,并通过自由空间实验和穿墙实验验证了该定位方法的有效性。综合实验结果,得出以下结论:
(1)从自由空间实验结果来看,该方法在自由空间场景下能有效实现对目标的二维定位,与目标实际坐标相比该方法能较为准确地估计出目标的二维坐标。从25个不同位置的定位结果来看,最小的误差为1.4 cm,最大误差为22.1 cm,平均误差为11.2 cm。
(2)在穿墙实验中,该方法同样能有效对目标进行二维定位并给出目标的二维坐标。从25个不同位置的定位结果来看,最小的误差只有1.4 cm,最大误差为29.1 cm,平均误差为12.8 cm。体现出了较好的性能。
(3)综上所述,通过自由空间实验和穿墙实验验证了该基于双曲线的定位方法的有效性,平均定位误差小于13 cm,最大误差为29.1 cm,而成年人身体的宽度也多数在30 cm以上,因此这种误差大小是与人体尺寸可比拟的,在实际的救援应用中是可以接受的。
本文主要关注了单个目标的二维定位,通过实验研究验证了该方法实现目标二维定位的可行性,为后续更复杂情景下的定位研究打下基础。下一阶段,还将基于该方法开展多个目标的二维定位、目标的三维定位等研究,以期将该定位方法推广到更加实际的应用中。
[1] Qi F,Liang F,Lv H,et al.Detection and classification of finer-grained human activities based on stepped-frequency continuous-wave through-wall radar[J].Sensors,2016,16(6):885.
[2] Lv H,Qi F,Zhang Y,et al.Improved detection of human respiration using data fusion basedon a multistatic UWBradar[J].Rem Sens,2016,8(9):773.
[3] Liang F,Qi F,An Q,et al.Detection of multiple stationary humans using UWB MIMO radar[J].Sensors,2016,16(11):1922.
[4] 张杨,雷涛,焦腾,等.倒“T”形天线阵列生命探测雷达多目标三维定位仿真研究[J].医疗卫生装备,2012,33(3):6-8.
[5] Dusan K,Jana R,Daniel U.Mutual shadowing effect of people tracked by the short-range UWB radar[A].2011 34thInternational Conference on Telecommunications and Signal Processing[C].New York:IEEE,2011:302-306.
[6] 张自启,吕昊,陈扶明,等.UWB生物雷达多静止人体目标呼吸检测中“遮蔽效应”的实验研究[J].医疗卫生装备,2017,38(4):1-5.
[7] 李韦华,薛飞,马锦垠.时延差双曲面定位方法在鱼雷入水点测量中的应用[J].鱼雷技术,2015,(6):420-422.
[8] 朱祥娥,蔡艳辉,王权.双曲面模型海洋三维定位数据模拟及精度分析[J].海洋测绘,2008,28(6):6-9.
[9] 殷桂华,王小辉,雷毅谈.基于TDOA的室内运动目标双曲线RFID定位方法[J].计算机应用,2014,34(S2):52-54.
[10] 刘翔,宋常建,胡磊,钟子发.一种非视距环境下的椭圆-双曲线混合被动定位技术[J].电路与系统学报,2013,18(2):305-309.
[11] 熊清岚.一种室内多站时钟同步和双曲线TDOA定位方法[J].电子技术与软件工程,2016,23:52-53.
[12] Qi F,Liang F,Lv H,et al.Detection and classification of finer-grained human activities based on stepped-frequency continuous-wave through-wall radar[J].Sensors,2016,16(6):885.
[13] 张杨,吕昊,于霄,等.基于超宽谱雷达多目标穿墙探测定位技术的研究[J].医疗卫生装备,2016,37(8):10-13.
[14] 张芫蓓,王帅杰,王昊,等.基于双源IR-UWB生物雷达的强反射杂波抑制[J].中国医疗设备,2016,31(11):28-32.
[15] 薛慧君,张杨,吕昊,等.基于信息熵估计的生物雷达弱周期信号识别技术研究[J].中国医疗设备,2017,32(1):22-25.
[16] 刘淼,吕昊,李盛,等.基于参数化双谱分析的超宽带生物雷达人体目标非接触检测[J].中国医疗设备,2013,28(11):15-18.
Two Dimensional Localization Algorithm of Bio-Radar Based on Hyperbolic Model
ZHANG Ziqi, ZHANG Yang, Qi Fugui, LIU Miao, WANG Pengfei, YIN Yue, SHI Gang, WANG Jianqi
School of Biomedical Engineering, The Fourth Military Medical University, Xi’an Shaanxi 710032, China
At present, most targets detection algorithms in two dimensions is multi-channels bio-radar chose to locate targets by finding the intersection of some arcs, these algorithms may not intersecting those arcs into one point because of the inaccuracies from one of the channels. This paper presented a two-dimensional target localization algorithms based on hyperbolic model, it combined the hyperbolic determined by two of the channels and the arc determined by another channel to realize the two-dimensional localization of the target. The results of the free space and through wall experiment indicated the method could accurately determine the two-dimensional coordinates of the target in Cartesian coordinates, the average error between the two-dimensional coordinates and the actual position of the target was about 10 cm, which verified the correctness and validity of the algorithm. The algorithm is simple and reliable, and can provide effective guidance for actual search and rescue work.
bio-radar; ultra-wide band; hyperbolic; positioning; life detection
TP393
A
10.3969/j.issn.1674-1633.2017.12.006
1674-1633(2017)12-0025-05
2017-08-10
国家自然科学基金(61327805);第四军医大学人才资助项目(4139Z3B8DA)。
王健琪,教授,博士生导师,主要研究方向为非接触生命信号检测。
通讯作者邮箱:wangjq@fmmu.edu.cn
本文编辑 袁隽玲
猜你喜欢
中学生数理化·教与学(2017年1期)2017-01-19
福建中学数学(2016年7期)2016-12-03
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年2期)2016-02-06
对联(2011年20期)2011-09-19
对联(2011年10期)2011-09-18
对联(2011年6期)2011-09-18
对联(2011年2期)2011-09-14
