基于图像识别与雷达测距技术的开车看手机安全预警系统
2018-01-09 12:40胡智超吕亮
科技资讯 2017年32期
胡智超++吕亮
摘 要:随着交通运输业的发展,交通事故已成为当前世界各国所面临的严重问题,而因开车看手机造成的交通事故正在逐年增加。针这一现象,提出一套基于图像识别与雷达测距技术的开车看手机安全预警系统。本系统采用基于opencv的图像处理技术用于检测驾驶员是否在看手机,利用雷达测距用于对外部障碍物数据的采集,根据相应算法判断其是否存在危险,最后根据两者结果综合判断,建立相应安全等级,辅助驾驶保障驾驶员行车安全。
关键词:开车看手机 安全预警 图像识别 雷达测距 系统开发
中图分类号:U471.1 文献标识码:A 文章编号:1672-3791(2017)11(b)-0016-02
随着智能手机的普及,除了给人们的生活带来许多便利以外,还影响着人们的日常生活。目前,许多司机在开车时都养成了看手机的习惯,然而因为这一坏习惯所引发的交通事故逐年增多。据上海市的不完全统计,2014年1至10月,本市共发生致人死亡交通事故690起,其中由开车接听电话、玩微信等“其他妨碍安全行车的违法行为”引发的死亡事故高达204起,占到了总数的29.6%。
目前有些国家也研发了一些技术来预防因为开车看手机而造成的交通事故,例如英国一家企业开发的一款手机应用能够监测用户的开车速度,当时速达到6km时自动关闭拨出电话、收发短信和电子邮件、社交软件等会分散司机注意力的功能。国外对于开车玩手机主要通过手机应用层面来限制手机的使用,这种做法过于被动不适于我国国情,通过主动辅助安全驾驶在我国是更容易被接受。而国内对于开发车内监测驾驶员开车看手机预警系统并没有太多的研究成果。
1 系统的实际构成及工作流程
1.1 系统模块
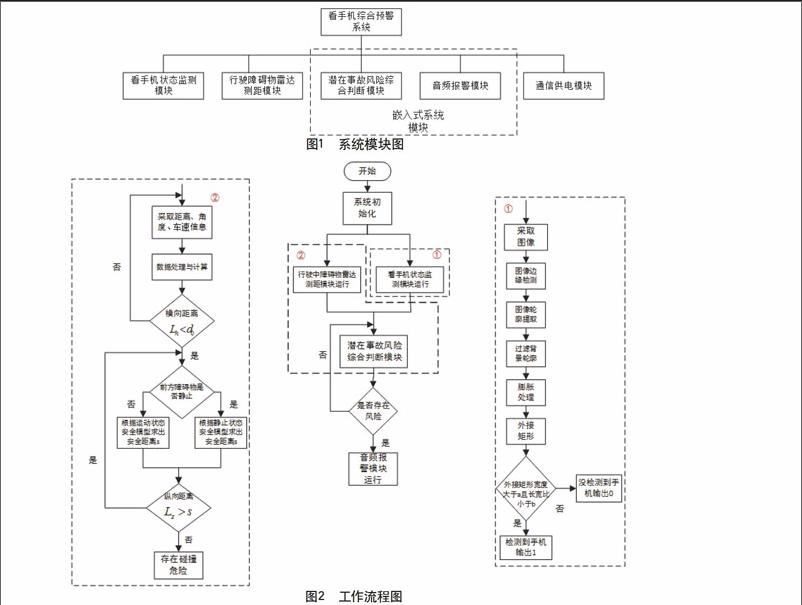
如图1所示,本系统总共分为4个模块,分别是看手机状态监测模块、行驶障碍物雷达测距模块、嵌入式系统模块(包括潜在事故风险综合判断模块和音頻报警模块)、通信供电模块。
1.2 工作流程
当汽车在道路上行驶时,周围的环境都是不确定的。本系统是通过检测驾驶员的驾驶状态,并判断他此时是否在玩手机,同时启动RPLIDAR雷达测距仪来检测周围的道路环境。雷达将检测到的数据发送给潜在事故风险综合判断模块,经过所设定的一系列程序处理之后,在综合开车看手机状态监测结果进行综合风险判断。如果判断出处于危险情况下,则将所得的结果发送给音频报警模块进行报警:只检测到驾驶员在看手机为一级警报,只检测到存在危险障碍物为二级警报,同时检测到这两种情况为三级警报,危险等级依次上升,音频警报频率依次上升。工作流程图如图2所示。
2 关键技术
2.1 看手机状态监测模块
看手机状态监测模块是以图像识别作为解决方法,利用opencv语言的图像处理,对摄像头设置定时抓拍的照片进行处理,利用手机屏幕反光和发光其周围光点多的情况,首先运用opencv中的canny算法进行图像的边缘检测,在利用findcontours函数获取到图像的所有轮廓,然后通过增大阈值将背景干扰轮廓进行进一步的过滤,得到预处理后的图像;得到图像会有比较散碎的轮廓,为了进一步的将轮廓提取出来,对该图像进行膨胀操作,将相邻的零星线条集中在一起得到膨胀图,最后运用外接圆或者外接矩形的方法进行处理,为了能够进一步的筛选提高准确率,通过设置最小外接矩形的宽度以及长宽比得到最终的检测图像,将手机识别出来。
2.2 行驶障碍物雷达测距模块
该模块采用的是RPLIDAR雷达测距仪。RPLIDAR采用了激光三角测距技术,再配合高速视觉采集处理机构,每次测距过程中,RPLIDAR将发射经过调制的红外激光信号,该激光信号在照射到目标物体后产生的反光将被RPLIDAR的视觉采集系统接收,然后经过嵌入在RPLIDAR内部的DSP处理器实时解算,被照射到的目标物体与RPLIDAR的距离值以及当前的夹角等信息将从通讯接口中输出。
2.3 嵌入式系统模块
2.3.1 潜在事故风险综合判断模块
本模块对障碍物进行风险判断,同时结合开车看手机状态检测模块结果进行综合风险判断。障碍物风险判断从横向距离和纵向距离两个指标来进行判断。开车看手机会明显增大车辆的偏离车道次数,因此为保证安全设定横向安全距离。对于大于横向安全距离的障碍物可以看作是安全的,而对于横向安全距离内的障碍物再通过纵向距离来进行判断。纵向距离风险判断是基于车辆性能下的制动模型的,根据道路的实际情况,实时通过车速,制动减速度等参数计算出安全距离,再与测得的实际纵向距离比较进行风险判断(本模块有具体核心算法)。
2.3.2 音频报警模块
本模块所采用的主要元器件是蜂鸣器,根据危险等级的高低发出不同频率的警报。
3 系统硬件构成
系统的硬件部分主要由摄像头、RPLIDAR雷达、STM32F407单片机构成。摄像头采用一般高清摄像头,能够清楚的拍到驾驶员开车时的实时状。RPLIDAR是激光扫描雷达,输出频率为5.5Hz,测距的精度可达到0.2cm,测量范围是360°,可以清楚的检测到周围的道路环境。集成开发板的核心芯片是基于Contex M4内核的STM32F407单片机,正常工作频率为168MHz,含有SERISE,CAN,I?C,USB等通信接口,由于设计对传输距离要求不高,采用串口作为数据通信(配置为波特率115200,一位停止位,无校验)。获取雷达数据时采用串口的DMA模式传输,与RPLIDAR进行的通讯采用非文本形式的二进制数据报文进行,且每个数据报文均具有统一的报头数据格式。
4 应用前景
随着信息化时代的飞速发展,越来越多的人们出行离不开手机,而随着汽车的普及,越来越多的人们出行会选择开车。人们在开车的时候又时常与手机进行“交流”,一旦发生突发状况,不仅不利于自身的安危,也会影响道路交通的正常秩序。如果该系统应用成功并且普及,便可以有效避免因开车看手机发生的安全事故,做到真正的安全出行、和谐交通。
参考文献
[1] 毛星云,冷雪飞.OpenCV3编程入门[M].电子工业出版社,2015.
[2] 王伟杰,王春磊,王玖,等.高速公路最小行车安全距离及预警系统设计[J].大连交通大学学报,2010(5):6-10.
[3] 许伦辉,罗强,吴建伟,等.基于最小安全距离的车辆跟驰模型研究[J].公路交通科技,2010(10):95-100.
[4] 潘勇,唐自强,龚贤武,等.基于行驶状态估计的车车协同纵向安全距离模型[J].公路交通科技,2016(7):137-144.
[5] 李焱琪.手机使用对驾驶行为影响研究综述[J].青年科学:教师版,2014(9).endprint
猜你喜欢
国际商业技术(2022年4期)2022-04-21
科技视界(2019年31期)2019-12-02
数码世界(2019年6期)2019-09-09
中国信息技术教育(2019年2期)2019-01-28
计算机应用(2016年10期)2017-05-12
中国高新技术企业(2016年31期)2016-12-22
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
中国信息技术教育(2016年21期)2016-12-05
电脑知识与技术(2016年21期)2016-10-18