
基于模糊PID控制器的1/2整车半主动悬架仿真研究
2018-01-17 23:35王孝鹏吴晨雄黄道进
湖南工业大学学报 2017年6期
王孝鹏,吴晨雄,黄道进
(1.三明学院 机电工程学院,福建 三明 365004;2.机械现代设计制造技术福建省高校工程研究中心,福建 三明 365004;3.东南福建汽车有限公司,福建 福州 350119)
0 引言
车辆在行驶过程中,整车的平顺性与操纵稳定性取决于悬架系统的特性。悬架是车身与车轮之间的传力装置,在整车的行驶过程中只有在特定的行驶条件下,被动悬架的运动状态才能达到最优。当路面的条件或者行驶的速度发生变化时,悬架的最优状态会发生破坏,因此被动悬架的设计只能采取折中的方法来进行。半主动悬架的核心是采用不同的控制策略对减震器的阻尼特性进行调节。纯模糊控制系统具有不依赖系统的数学模型,其鲁棒性好、容错能力强,但具有一定的稳态误差。经典的PID控制策略可以较好地消除系统的稳态误差,采用模糊PID复合控制策略,可以把两种控制器的优势结合起来,实现优势互补,获得较好的控制效果。
半主动悬架是近年研究的一个热点,其研究主要集中在1/4整车模型配合不同的控制策略方面。该研究方法主要是为了验证算法的正确性与实用性,但与实际悬架及整车的运动状态不符,算法也不适用整车或者半车悬架运动特性的控制。相对于主动悬架,半主动悬架主要通过改变减震器的可变力输出来控制整车的震动特性,其性能与主动悬架接近,且结构简单、能耗小[1-5]。本文通过建立基于半车的半主动悬架仿真模型,采用模糊PID控制器,对1/2整车模型进行仿真研究,并与被动悬架的性能进行对比。
1 半车模型
半车模型具有4个自由度,分别为:车身的垂直振动、车身俯仰运动及前后轴的垂向运动。在建模过程中作如下假设:
1)在低频路面的激励下,车辆的左右路面模型输入具有较高的相关性,可认为左右轮路面输入基本一致;再考虑到车辆的几何尺寸及质量分布通常为左右对称,则可以认为车辆左右两侧以完全相同的方式运动。
2)在高频路面激励下,车辆所受到的激励大多只涉及车轮的跳动,对车身的影响较小,车身两边的相对运动可以忽略[6-8]。
经简化建立的半车模型如图1所示,整车参数如表1所示。半车各运动方程为


式(1)~(6)中:m为半车身质量;
m1,m2分别为前、后轮非簧载质量;
zb为车身质心处垂直位移;
z1,z3分别为前、后轴悬架非簧载质量的垂直位移;
z2,z4分别为前、后轴悬架与车身前、后端连接处的垂直位移;
z01,z02分别为前、后轮对应的路面垂直位移输入;
K11,K12分别为前、后轮胎刚度;
K21,K22分别为前、后悬架弹簧刚度;
C21,C22分别为前、后悬架阻尼系数;
U1,U2分别为前、后轮系处半主动作动器输出力;
Ihp为半车身质心处的转动惯量;
θb为半车身质心处的俯仰角;
a,b分别为质心到前、后轴的距离。

图1 半车模型Fig.1 Illustration of the semi-vehicle mode
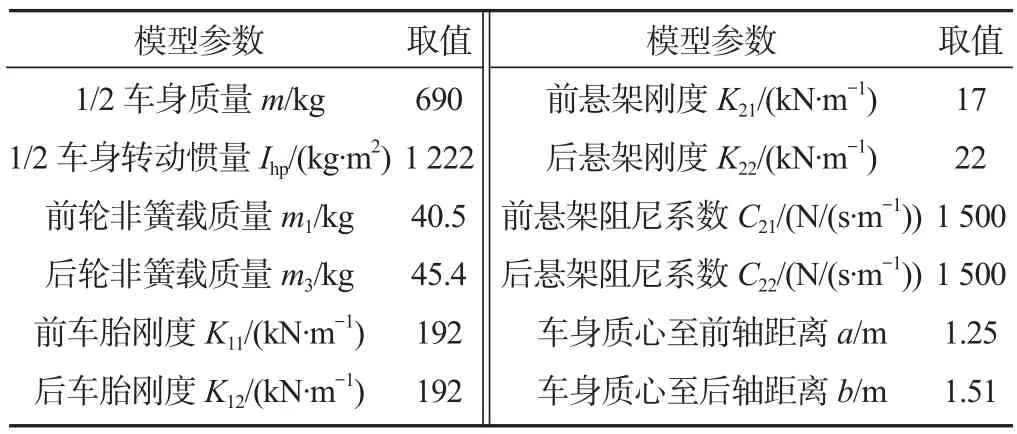
表1 整车参数Table 1 Vehicle parameters
车身质心处垂向加速度、半车身质心处的俯仰角加速度、前后悬架与半车身前后端连接处垂向加速度之间的关系为:

2 路面模型
对悬架性能分析时需要输入路面模型。在不同的路段测量,很难得到两个完全相同的路面轮廓曲线,通常是把测量得到的大量路面不平度随机数据,经数据处理得到路面功率谱密度。产生随机路面不平度时间轮廓有两种方法:由白噪声通过一个积分器产生或者由白噪声通过一个成型滤波器产生。路面时域模型可用公式描述为

式中:q(t)为路面垂向位移;
f0为时间频率;
Gq为路面不平度系数;
V为汽车行驶速度;
w(t)为积分白噪声。
在整车行驶过程中,由于前后轮轴距的存在,后车轮的路面输入相对于前车轮要有相对的时间滞后。本车轴距为2.76 m,若行车速度为20 km/h,则后轮延迟0.138 s;若行车速度为40 km/h,则后轮延迟0.069 s;若行车速度为60 km/h,则后轮延迟0.046 s。根据公式(9)及前后车轮之间的路面延迟特性,搭建的Simulink仿真模型如图2所示,经计算后得到前后轮对应的路面垂直位移如图3所示。

图2 B级路面不同车速时域仿真模型Fig.2 Time-domain simulation models at different speeds on class B roads
根据公式(1)~(9)建立半车模型在B级路面输入作用下的仿真模型如图4所示,计算输出量为车身质心处的加速度与俯仰角加速度,前后悬架动行程及前后轮胎动行程。其中,前后悬架与车身连接处的速度及其变化率作为半主动悬架的输入量。

图3 B级路面垂向位移Fig.3 Class B road surface vertical displacement
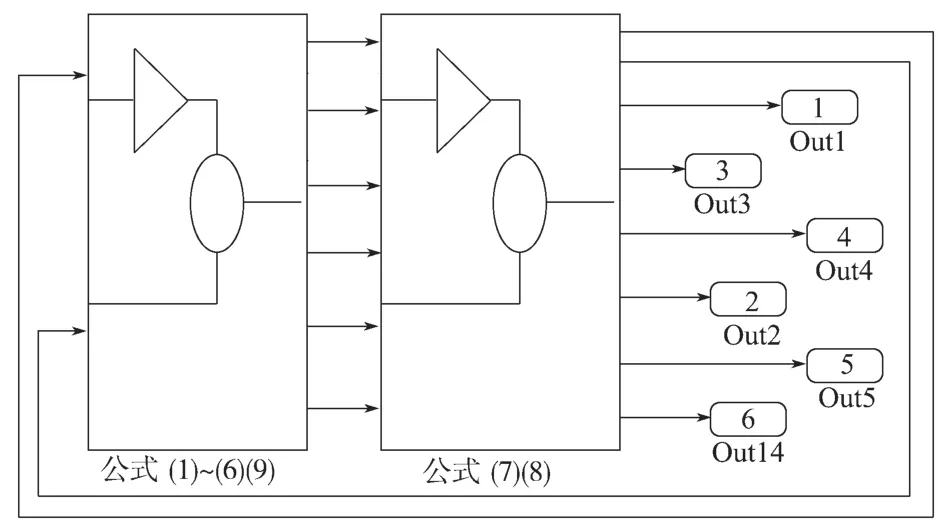
图4 半车被动悬架仿真模型Fig.4 Semi-passive suspension simulation model
3 模糊PID控制器设计
模糊PID复合控制器具有PID与模糊控制器各自的优势。PID控制具有调节原理简单、参数容易整定和实用性强等优点,其控制规律如式(10)所示。

式中:u(t)为实时主动控制力;
Kp为比例系数;
Ki为时间积分常数;
Kd为时间微分常数;
e(t)为实时误差,即车身速度与理想值的差。
模糊PID控制系统的输入为半车身的速度及其变化量,输出为主动控制力;模糊控制器的输出为ΔKp,ΔKi,ΔKd。实际的PID控制参数如式(11)~(13)所示。

式(11)~(13)中:Kp,Ki,Kd为预设PID控制参数;
Kp1,Ki1,Kd1是最终PID控制参数
Hp,Hi,Hd为比例因子。
模糊控制规则是模糊控制器的核心,它用语言的方式描述了控制器输入量与输出量之间的关系。悬架的输入输出分别采用7个语言变量规则来进行描述:负大(-3)、负中(-2)、负小(-1)、零(0),正小(1)、正中(2)、正大(3)。输入采用高斯隶属函数,以保证输入参数平缓且稳定性好;输出采用三角隶属函数,以保证较好的灵敏度。
整车在60 km/h的速度下直线行驶时,前悬架与车身连接处的速度与期望值的误差及其变化率量化因子分别为:

后悬架与车身连接处的速度与期望值的误差及其变化率量化因子分别为:

当误差较大时,Kp取较大值,系统响应较快,模糊控制系统输出较大的ΔKp值,ΔKd取较小值,以避免系统出现过大超调量,产生不稳定现象;当误差中等时,Kp取较中间的值,保证系统具有较小的超调量,ΔKd取值不变或者稍微减小,Ki取适当值;当误差较小时,Kp取较小值。当误差及其变化率方向一致时,说明误差有增大的趋势,此时应取较大的ΔKp值[9-13]。误差及其变化率同 ΔKp、ΔKi、ΔKd的模糊控制规则如表2~4所示,其中E,EC分别为车身速度误差及其变化率。根据式(5)~(8)及模糊控制规则,建立模糊PID复合控制器,如图5所示。

表2 模糊控制规则ΔKpTable 2 Fuzzy control rules of ΔKp

表3 模糊控制规则ΔKiTable 3 Fuzzy control rules of ΔKi

表4 模糊控制规则ΔKdTable 4 Fuzzy control rules of ΔKd

图5 模糊PID控制器Fig.5 Fuzzy PID Controller
4 仿真分析
根据半车被动悬架仿真模型(图4)与模糊PID控制器模型(图5),搭建半车半主动悬架仿真模型,如图6所示。

图6 半车半主动悬架仿真模型Fig.6 Semi-active suspension simulation model
在B级路面上车辆分别以20,40,60 km/h的速度直线行驶,计算主、被动悬架的车身加速度、俯仰角加速度、前后悬架动行程、前后轮胎动行程。在60 km/h的速度下直线行驶时,车辆主、被动悬架的相关计算结果变化曲线如图7~12所示。其中仿真步长为0.005 s,仿真时间为10 s。各个速度段的悬架性能参数变化如表5所示。
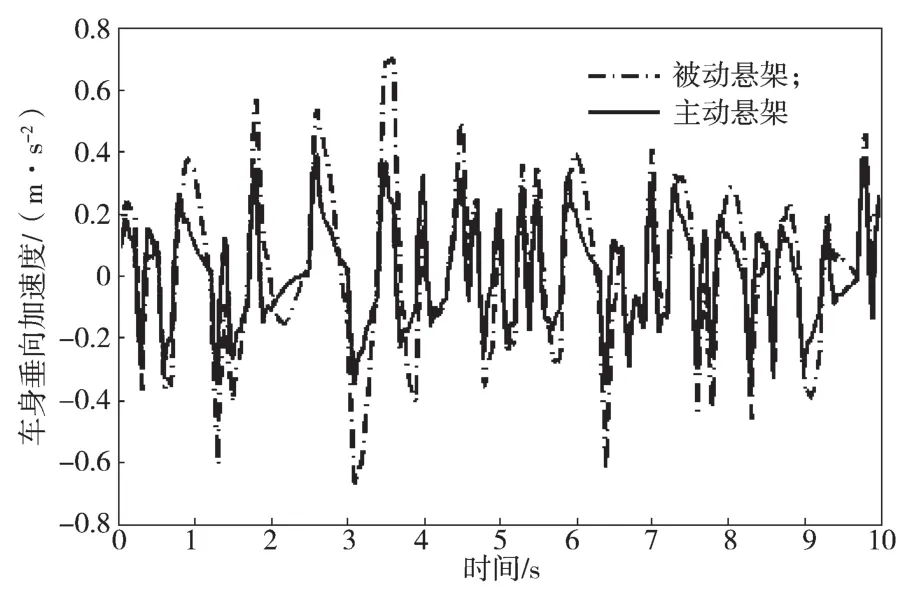
图7 车身质心垂向加速度变化曲线Fig.7 Body mass center vertical acceleration curves
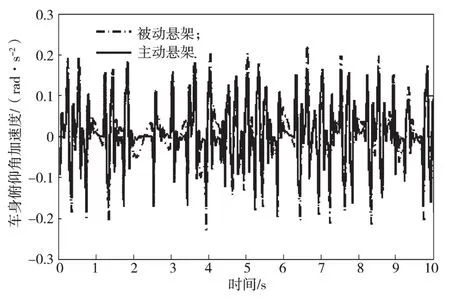
图8 车身质心俯仰角加速度变化曲线Fig.8 Body mass center pitch angle acceleration curves

图9 前悬架动行程变化曲线Fig.9 Front suspension dynamic travel curves

图10 后悬架动行程变化曲线Fig.10 Rear suspension dynamic travel curves

图11 前轮胎动行程变化曲线Fig.11 Front tire movement stroke curves

图12 后轮胎动行程变化曲线Fig.12 Rear tire movement stroke curves

表5 各个速度段的悬架性能参数均方根值Table 5 RMS values of suspension performance parameters for speed sections
从图7~12和表5中的结果可以看出,半主动悬架相对于被动悬架在性能上整体都有所提升;在各不同车速阶段,车身垂直加速度,俯仰角加速度、前后悬架动行程,轮胎动位移性能均有改善,其中车身垂向加速度改善尤为突出;整车在不同车速范围内乘坐舒适性和操纵稳定性得到了提升。
5 结论
通过建立1/2整车半主动悬架仿真模型,计算出前后悬架与车身连接处的速度及其变化率,作为磁流变阻尼力的输入参数;控制器采用模糊PID复合控制算法进行计算,可得如下结论:
1)车身的垂直加速度、俯仰角加速度、前后悬架动行程改善明显,提升了在不同车速下的乘坐舒适性与操纵稳定性;
2)前后轮胎动位移性能提升较小,随着车速的增加,前轮胎动位移保持不变,轮胎与地面之间的接触力特性改善受限;
3)采用模糊PID复合控制器的半主动悬架,其整体综合性能优越,鲁棒性较强,可实现全速范围内参数较好的调整。
[1]杨礼康.基于磁流变技术的车辆半主动悬挂系统理论与试验研究[D].杭州:浙江大学,2003.YANG Likang.The Theoret1ea1 and Experimental Investigation on Semi-Active Vehicle Suspension Employing Magneto-Rheological Technology[D].Hangzhou:Zhejiang University,2003.
[2]唐志桥.二分之一车辆悬架系统的动力学仿真研究[J].公路与汽运,2015(1):5-8,56.TANG Zhiqiao.Dynamics Simulation of Half Vehicle Suspension System[J].Highways & Automotive Applications,2015(1):5-8,56.
[3]HUANG C,CHEN L,JIANG H B,et al.Fuzzy Chaos Control for Vehicle Lateral Dynamics Based on Active Suspension System[J].Chinese Journal of Mechanical Engineering,2014,27(4):793-801.
[4]YOSHIMURA T,TERAMURA I.Active Suspension Control of a One-Wheel Car Model Using Single Input Rule Modules Fuzzy Reasoning and a Disturbance Observer[J].Journal of Zhejiang University:Science A,2005,6(4):251-256.
[5]DONG X,YU M T.Genetic Algorithm Based Fuzzy Logic Control for a Magneto-Rheological Suspension[J].Journal of Vibration and Control,2014,20(20):1343-1355.
[6]刘 静.带天棚阻尼的1/2车辆主动悬架仿真研究[J].公路与汽运,2015(3):15-20,80.LIU Jing.The Skyhook Active Suspension Simulation Research of the Half Vehicle[J].Highways & Automotive Applications,2015(3):15-20,80.
[7]张 昆,习文辉,邓文华,等.基于Car Sim-Simulink联合仿真的整车半主动悬架模糊控制仿真研究[J].昆明理工大学学报(自然科学版),2015,40(1):39-44.ZHANG Kun,XI Wenhui,DENG Wenhua,et al.Fuzzy Control Simulation of Full Vehicle Semi-Active Suspension Based on Car Sim-Simulink Co-Simulation[J].Journal of Kunming University of Science and Technology(Natural Science Edition),2015,40(1):39-44.
[8]宋萌萌,肖顺根.基于模糊PID算法的WEDM-LS恒速走丝控制系统的设计[J].江西理工大学学报,2013,34(5):41-47.SONG Mengmeng,XIAO Shungen.The Constant Speed Wire-Moving System Design of LS-WEDM Based on Fuzzy PID Algorithm[J].Journal of Jiangxi University of Science and Technology,2013,34(5):41-47.
[9]SUN T,HUANG Z Y,CHEN D Y,et al.Signal Frequency Based Self-Tuning Fuzzy Controller for Semi-Active Suspension System[J].Journal of Zhejiang University:Science A,2003,4(4):426-432.
[10]YU Y,WEI X X,ZHANG Y F,et al.Analyses and Simulation of Fuzzy Logic Control for Suspension System of a Track Vehicle[J].Journal of Beijing Institute of Technology,2008,17(2):164-167.
[11]XU X,ZHOU K K,ZOU N N,et al.Hierarchical Control of Ride Height System for Electronically Controlled Air Suspension Based on Variable Structure and Fuzzy Control Theory[J].Chinese Journal of Mechanical Engineering,2015,28(5):945-953.
[12]NGUYEN S D,CHOI S B.A Novel Minimum-Maximum Data-Clustering Algorithm for Vibration Control of a Semi-Active Vehicle Suspension System[J].Journal of Automobile Engineering,2013,227(9):1242-1254.
[13]SU X J,YANG X Z,SHI P,et al.Fuzzy Control of Nonlinear Electromagnetic Suspension Systems[J].Mechatronics,2014,24(4):328-335.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
汽车实用技术(2022年15期)2022-08-19
装备制造技术(2020年11期)2021-01-26
北京汽车(2016年6期)2016-10-13
汽车工程学报(2015年6期)2016-03-23
汽车实用技术(2015年8期)2015-12-26
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
噪声与振动控制(2015年4期)2015-01-01
客车技术与研究(2014年1期)2014-03-20
振动、测试与诊断(2014年6期)2014-03-01
