基于改进RBF—PID的板球系统位置控制
2018-02-01 11:51苑仁令向凤红毛剑琳郭宁
软件导刊 2018年1期
苑仁令+向凤红+毛剑琳+郭宁
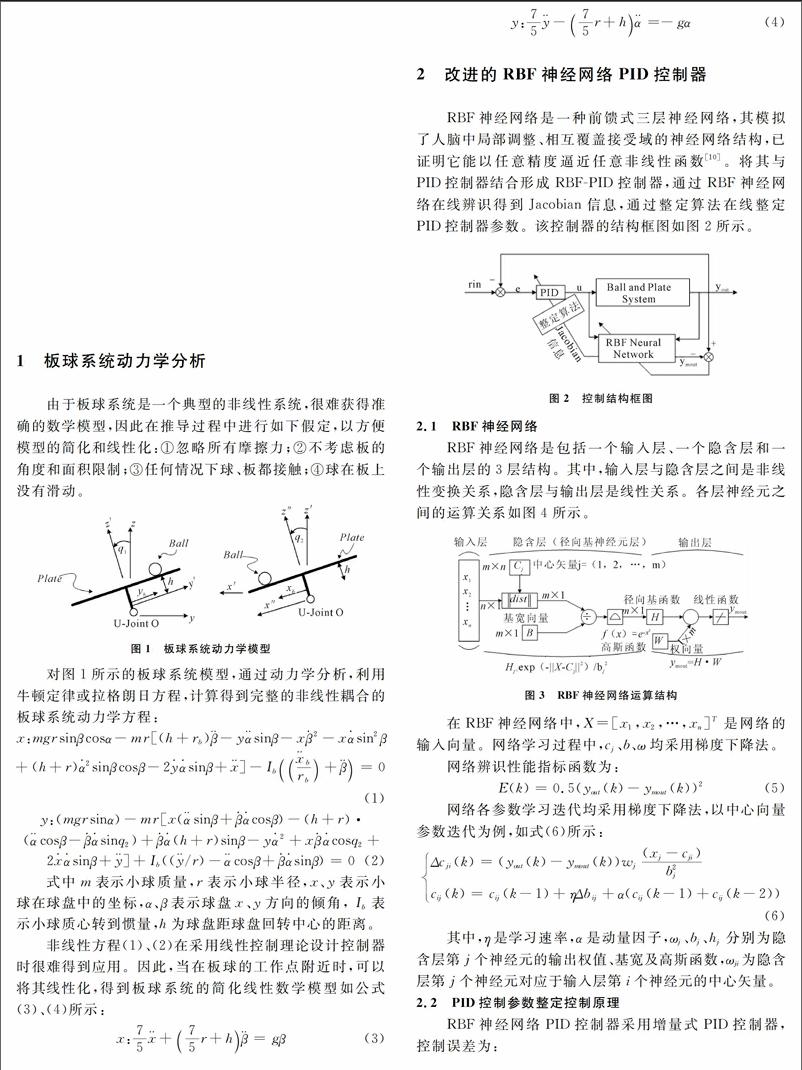

摘要:板球系统是一个典型的多变量、不确定、强耦合的非线性系统,一直被国内外许多学者作为研究非线性控制系统的实验平台。通过动力学分析得到板球系统的数学模型和相应的简化模型,针对系统响应速度慢的问题,在原RBF-PID控制PID参数调整采用梯度下降法的基础上,引入加速率的概念加快系统响应速度。实验结果表明,该控制算法可使控制误差缩小在2mm以内,控制时间也减少了2.8s,且具有较好的鲁棒性。
关键词:板球系统;RBF神经网络;PID;加速率;位置控制
DOIDOI:10.11907/rjdk.172078
中图分类号:TP319
文献标识码:A文章编号文章编号:1672-7800(2018)001-0169-03
Abstract:Ball and plate system is a typical multivariable, uncertain and strongly coupled nonlinear system. It has been used by many scholars at home and abroad to study the experimental platform of nonlinear control system. In this paper, the mathematical model of the ball and plate system and the corresponding simplified model are obtained by the kinetic analysis. In the case of system slow response, the concept of acceleration is introduced on the basis of the gradient descent method in the original RBF-PID control PID parameter to speed up the system's response speed. The experimental results show that the control algorithm can reduce the control error within 2mm, the control time is reduced by 2.8s and has good robustness.
Key Words:ball and plate system; RBF neural network; PID;acceleration rate; position control
0引言
板球系统是一个多变量、强耦合和不确定性的非线性动态系统,主要用于学习和研究各种控制算法[1-2]。其控制目的是控制自由滚动的小球运动到指定位置或按照给定轨迹运动。通过对板球系统进行控制算法的研究,以期为化学热反应、航空航天领域等危险性较高的控制系统找到稳定的解决方案。
本文以固高GBP2001型系统作为研究对象,PID控制具有算法简单、易于实现、稳定性好等优点,在板球系统控制中得到了广泛应用。由于实际系统的耦合性、非线性和不确定性,以及PID参数整定方法复杂和需要精确的数学模型等,PID控制在实际系统控制中效果并不理想[3-4]。神经网络以其强大的非线性映射能力、并行处理能力和自学习能力,能很好地适用于非线性不确定系统控制[5-6]。针对RBF神经网络整定PID参数采用梯度下降法,导致在控制初期学习速度慢、适应能力差等缺点,国内外学者提出了很多改进算法[7-12]。文献[7]采用粒子群算法优化RBF神经网络,不仅改善了神经网络性能,也提高了PID控制器性能;在RBF神经网络参数调整和PID参数调整中,文献[8]引入动量因子和增速率的概念,减轻了系统震荡,且较传统PID控制具有更好的鲁棒性和较快的响应速度;文献[9]应用Levenberg Marquardt算法代替梯度下降法整定PID参数,使控制系统的速度明显提高;文献[10]基于切换控制策略,利用RBF神经网络控制PID参数,并将其应用到板球控制系统中,缩短了系统控制时间,控制精度也得到一定程度提高;文献[11]利用传统PID、模糊控制、RBF神经网络的优点设计了模糊RBF神经网络PID控制器,将其应用到高频感应加电源控制中,通过仿真实验验证了该控制算法具有較好的适应性和鲁棒性;文献[12]采用粒子群算法优化模糊RBF结构,增强其学习能力,将优化后的模糊RBF神经网络整定PID参数,并且应用到板球系统中。仿真结果表明,该算法提高了板球系统的轨迹跟踪精度与鲁棒性。
本文借鉴已有的文献算法,针对提高实物系统精度和缩短系统控制时间进行了研究,在PID参数整定过程中引入增速率概念,加快系统的响应速度,进而将本文算法应用到GBP2001型板球系统位置控制实验中。
由图可得出,PID控制时,小球到达球盘中心的时间为14.4s,小球稳定在球盘中的坐标为(2.9,3.0),误差较大;RBF-PID控制时,小球到达球盘中心的时间为14.3s,系统控制时间较长,小球稳定在球盘中的坐标为(1.5,1.6);IRBF-PID控制时,小球到达球盘中心的时间为11.6s,小球稳定在球盘中的坐标为(1.294 7,0.018 6)。本文的改进算法相比于PID控制和RBF-PID控制算法,其控制小球到达指定点的时间缩短了2.8s,控制精度误差也小于2mm。
4结语
本文针对固高GBP 2001型板球系统建立了一个比较简单的数学模型,并对板球系统的位置控制进行研究,采用视觉检测技术实时反馈小球的位置信息,分别完成了PID控制、RBF-PID控制及IRBF-PID控制的板球系统位置控制试验。结果表明,本文设计的IRBF-PID控制算法与传统PID控制及RBF-PID控制算法相比,提高了系统响应速度,在控制精度上也有所提高,因此具有一定实用价值。endprint
参考文献:
[1]韩京元,田彦涛,孔英秀,等.板球系统的间接模糊自适应控制[J].控制与决策,2015(2):303-310.
[2]史智慧,刘枫,祁虔.基于视觉检测板球系统的变论域模糊控制研究[J].西南师范大学学报:自然科学版,2017,42(2):148-152.
[3]ROY P. Design of a fractional order PD controller tuned by firefly algorithm for stability control of the nonlinear ball and plate system[C].IEEE International Conference on Advanced Communication Control and Computing Technologies,2014.
[4]ROY P, KAR B, HUSSAIN I. Trajectory control of a ball in a ball and plate system using cascaded PD controllers tuned by PSO[C].Proceedings of Fourth International Conference on Soft Computing for Problem Solving. Springer India, 2015:53-65.
[5]张旭.三种RBF神经网络比较分析[J].软件导刊,2013,12(4):34-36.
[6]徐磊,樊国磊,王超.RBF-PID控制器在倾斜摇摆试验台中的应用[J].软件导刊,2014(3):21-22.
[7]朱卫云,付东翔,葛懂林,等.基于RBF神经网络的永磁同步伺服电机控制系统[J].电子科技,2016,29(1):161-164.
[8]吴晓明,马立廷,郑协,等.改进的RBF神经网络PID算法在电液伺服系统中应用[J].机床与液压,2015,43(11):63-66.
[9]蔡满军,刘建军,刘明坤.基于RBF网络自整定PID控制的改进算法[J].控制工程,2008,15(1):15-17.
[10]ZHENG F, LI X, WANG S, et al. Position control of ball and plate system based on switching mechanism[C].IEEE International Conference on Automation and Logistics, 2011:233-237.
[11]付光杰,张微微,牟海维.基于模糊RBF网络高频感应加热电源控制的研究[J].化工自动化及仪表,2014,41(4):357-361.
[12]XIUCHENG DONG, YUNYUAN ZHAO, YUNYUN XU, et al.Design of PSO fuzzy neural network control for ball and plate system[J]. International Journal of Innovative Computing, Information and Control,2011,7(12):7091-7103.
(責任编辑:黄健)endprint