
干式DCT驻车机构性能分析与试验
2018-02-05 05:15张磊何建涛冯飞谷叶水
汽车技术 2018年1期
张磊 何建涛 冯飞 谷叶水
(1.格特拉克(江西)传动系统有限公司,南昌 330013;2.格特拉克亚太传动系统技术有限公司,上海 201203)
1 前言
驻车机构是DCT主动安全设计中防止车辆以较高的速度挂P挡或防止车辆在坡道滑行的一种安全装置。DCT驻车机构的设计关乎乘客在极端工况下的生命安全,是DCT设计中非常关键的主动安全设计。因此,对驻车机构进行分析研究特别有意义。陈华等[1]研究了变速器驻车机构从P挡换到R挡时的自动弹出力。刘诗等[2]研究了某自动变速器驻车机构驻车速度、坡道自锁能力以及坡道P挡拔出力矩等,但是未真实再现坡道拔出力矩真实值,台架试验与整车试验值可能有不小的偏差。张玉文等[3]使用多体动力学软件Recur⁃Dyn建立了包含多缸体、多弹性体等非线性多体模型的变速器驻车机构多体动力学模型,分析了P挡与R挡互相切换时的换挡性能,但未考虑平路允许挂挡最高车速。王明成[4]在考虑整车动力性和经济性设计要求的前提下,研究了双离合器自动变速器关键零部件结构、布置和性能,虽涉及驻车机构研究,但是对其详细设计及验证过程研究较少。
2 驻车机构
DCT驻车机构一般采用机械式驱动机构,而不采用液压式或气动式,主要原因是后者容易发生故障。驻车机构的设计,需满足以下使用要求:
a.允许汽车在较小的车速时挂入P挡。推荐临界挂入车速为2.4~5.6 km/h,即车速低于2.4 km/h时驻车机构一定要能锁住变速器,高于5.6 km/h时驻车机构一定不能锁住变速器。
b. 汽车正常行驶工况,尤其是高速行驶中,不允许挂上P挡。即车速较高时,即使外部操纵杆执行了挂P挡操作,变速器驻车机构中的扭簧等组件也必须保证棘爪不能锁住棘轮,亦即无法挂入P挡。
c.当汽车驻车后,尤其是在坡道上,驻车机构不能脱挡。
2.1 驻车机构设计
DCT驻车机构作为汽车制动可靠性主要部件之一,其结构示意如图1所示。

图1 驻车机构结构示意
2.2 工作原理
驻车机构主要用于控制汽车安全运行,其主要工作原理如下:
a.R挡挂P挡:当驾驶员在平路或坡道停车并意图挂P挡时,驾驶员推动换挡手柄,经变速器外侧的换挡机构带动换挡杆旋转,使得扭转弹簧驱动凸轮旋转,迫使凸轮与棘爪在P挡位置配合。此时,柱塞与挡位盘锁止在P挡,棘爪与棘轮啮合,变速器输出轴通过外花键与棘轮内花键连接从而被锁止。此操作可以控制汽车在安全行驶范围内挂进P挡。
b.脱P挡:即挂P挡逆过程。当乘客需要切换P挡到R挡以驱动汽车行驶时,需要切换手柄,迫使扭转弹簧带动换挡杆回位。此过程中,棘爪脱离棘轮,从动轴旋转自由度释放。
3 驻车机构多体动力学分析
3.1 ADAMS多体动力学方程
采用第一类拉格朗日方程[5]:
式中,T为系统广义坐标表达的动能;qj为广义坐标;Qj为在广义坐标qj方向的广义力;Φ为欧拉角;最后一项涉及约束方程和拉格朗日乘子,表达了在广义坐标qj方向的约束反力,其中λi为拉格朗日乘子。
在进行动力学分析之前,ADAMS软件会自动进行初始条件分析,以便在初始系统模型中使各物体的坐标与各种运动学约束之间达成协调,以保证系统满足所有的约束条件。
3.2 建模
驻车机构作为控制汽车驻车安全的核心零部件,其运行过程与整车其它性能密切相关。采用多体动力学仿真软件ADAMS建立详细的驻车机构模型及简化的整车模型。整车模型考虑整车满载质量、轴距、重心高度、轮胎、半轴及差速器等。变速器模型考虑离合器、输入轴、输出轴、挡位齿轮、主减速器齿轮等旋转件的转动惯量及扭转刚度。模型主要参数及数据见表1。
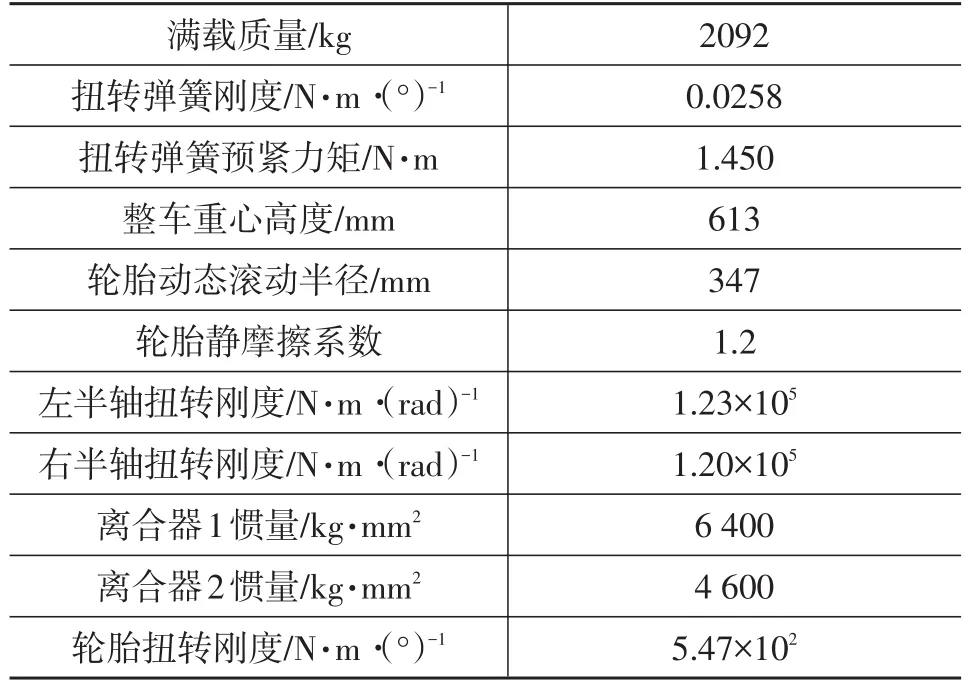
表1 驻车机构模型主要参数
3.3 仿真分析
3.3.1 平路驻车仿真
采用ADAMS软件,首先模拟整车在水平路面驻车机构临界挂入车速情况。图3为模拟前进方向和后退方向临界挂入车速。可知,前进方向和后退方向临界挂入车速仿真值分别为3.3 km/h、3.2 km/h。
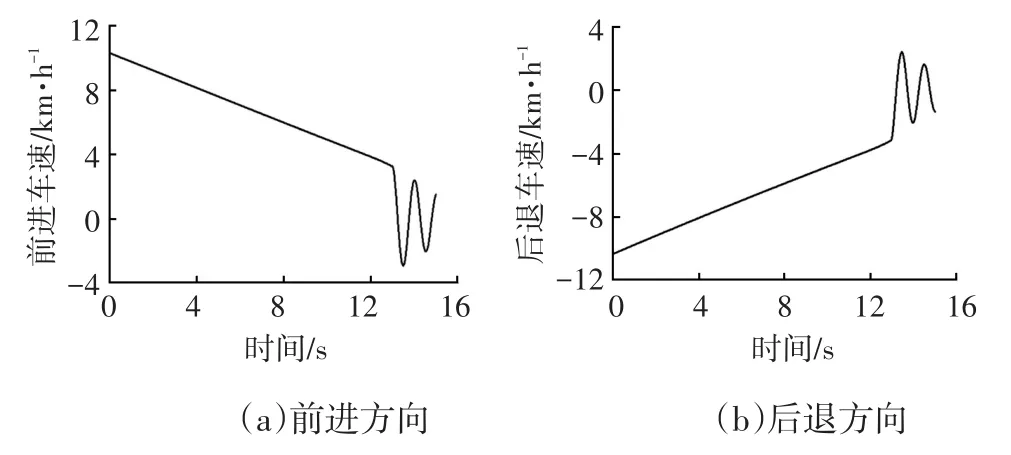
图2 临界挂入车速
3.3.2 坡道驻车仿真
对于该类型变速器的驻车机构,在坡道上停车挂入P挡后,如果驻车制动手柄与制动踏板的操作顺序不当,会导致退出P挡的力较大。为了预测该拔出力矩,按照试验规范要求,在30%坡道驻车时模拟操作不当时退出P挡所需的最大力矩,仿真结果如图3所示。可知,车头向下和向上P挡拔出力矩均为8.0 N·m。
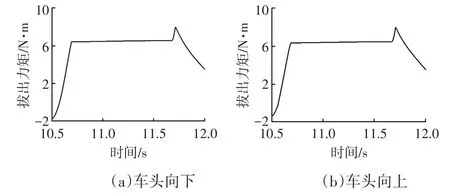
图3 P挡拔出力矩
4 驻车机构试验
按照试验规范要求,驻车试验需进行平路临界车速驻车试验及坡道驻车试验。
4.1 平路驻车试验
平路驻车试验需执行企业标准,测试在某试验场平直路面进行,如图4所示。平路临界挂入速度试验操作过程如下:
a. 将车辆加速至10~15 km/h;
b.松开加速踏板并将换挡操纵杆拨至P挡位置;
c.车速缓慢下降,直至驻车机构将变速器锁死。

图4 平直路面驻车试验
采用间接法测量车速,即通过采集差速器的转速,根据轮胎半径推算车速,图5标记了临界挂入速度读取点。按照试验规范,前进方向与后退方向分别测试10组数据,前进方向挂入速度分别为3.10 km/h、3.05 km/h、3.12 km/h、3.22 km/h、3.22 km/h、3.22 km/h、3.22 km/h、3.22 km/h、3.10 km/h、3.10 km/h,后退方向挂入速度分别为3.22 km/h、3.35 km/h、3.22 km/h、3.35 km/h、3.24 km/h、3.36 km/h、3.22 km/h、3.35 km/h、3.25 km/h、3.22 km/h。
4.2 30%坡道驻车试验
P挡拔出力矩试验在位于国内某试验场的30%坡度上进行,步骤如下:
a.将车开到30%坡上,踩住制动踏板将车停稳在坡道上;
b.将换挡杆拨至P挡后松开制动踏板;
c.驻车机构将锁住变速器从而使车停止在坡道上;
d.待车辆停稳后踩住制动踏板并将换挡杆拨离P挡位置。
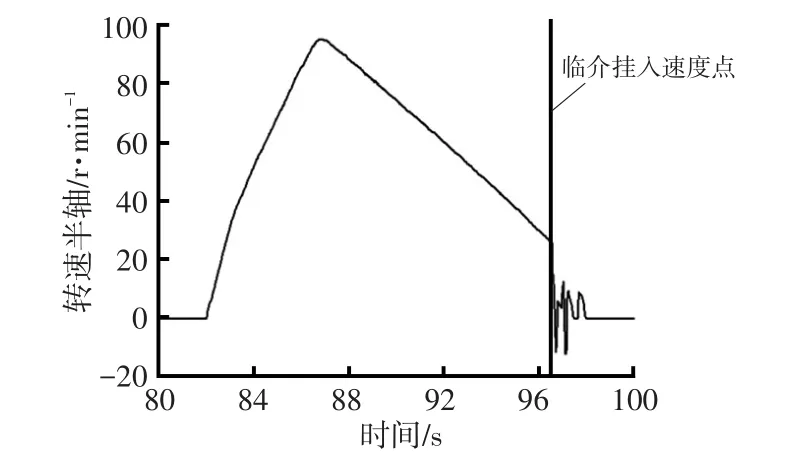
图5 驻车机构临界挂入速度点时半轴转速
图6为30%坡道试验场地。试验时,车头向上与车头向下分别进行150次测试。用于测试换挡扭矩所布置的传感器应变片贴在变速器换挡摇臂上,传感器使用前需要在实验室进行敏感度标定。

图6 30%坡道试验场地
P挡拔出力矩通过变速器摇臂上应变片来测量,图7为截取某个循环工况下车头向下和车头向上时换挡摇臂位置力矩测试结果。
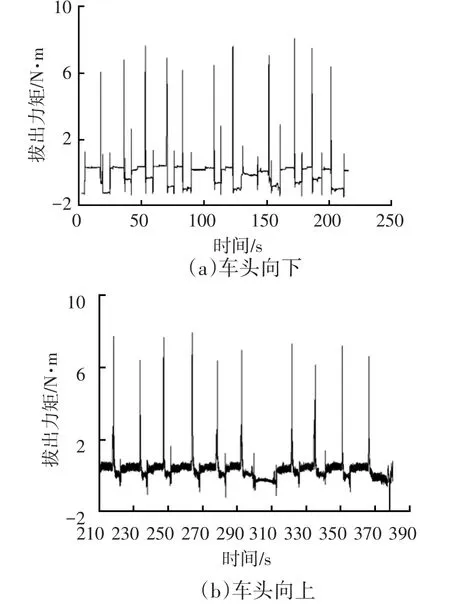
图7 拔出力矩测试值
由图7可知,试验属于恶劣工况试验,故试验过程中也对半轴扭矩进行检测,以免对变速器、差速器等核心零件造成损坏。测试过程中,车头向上方向的半轴动态扭矩值在2 309~3 298 N·m之间变化,车头向下方向半轴动态扭矩值处于3 210~4 301 N·m之间,如图8所示。
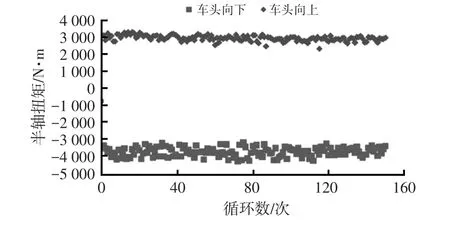
图8 半轴动态扭矩
为满足客户满意度,换算到换挡杆球头上的拔出力矩平均值均应小于10 N·m。P挡到N挡拔出力矩测试值如图9所示。可知,测试结果满足设计要求。
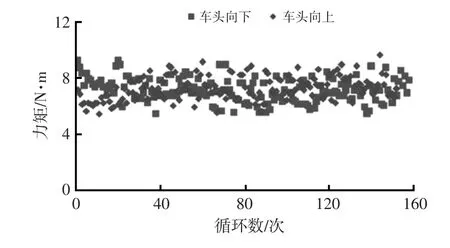
图9 P挡到N挡拔出力矩测试值
5 仿真与试验对比
为了验证多体计算模型的可靠性,将CAE仿真结果与整车测试结果进行对比。
5.1 平路驻车与试验对比
由于平路驻车试验受驾驶员影响很小,故前后方向的临界挂入车速值较一致,没有很大的波动。测试结果与仿真结果误差控制在8%以内,绝大部分次数控制在5%以内,说明仿真结果与试验结果吻合度较高,对比结果见表2。
5.2 坡道驻车与试验对比
坡道上拔出力矩试验受驾驶员随机操作的影响较大,比如踩制动踏板时机选择不同会导致棘爪、棘轮配合间隙不同,驾驶员P挡切换到N挡时间也不相同,这些因素都会导致拔出力矩波动。因此,该组试验结果离散性较大。故将仿真结果和测试数据平均值进行对比。车头向下时,拔出力矩仿真值为8.0 N·m,测试均值为7.1 N·m,两者误差约为11.3%;车头向上时,拔出力矩仿真值为8.0 N·m,测试均值为7.2 N·m,两者误差约为10%。测试值与仿真值均满足客户提出的“拔出力矩平均值小于10 N·m”的要求。

表2 平路驻车车速仿真与试验对比
6 结束语
本文通过建立多体动力学模型,仿真分析了某款车辆在满载工况下在平路上的驻车机构临界挂入车速和30%坡度上P挡拔出力矩,并将仿真结果与整车试验结果进行了对比。平路上临界速度仿真结果与试验结果相吻合,证明平路上仿真模型的合理性与实用性。30%坡度上仿真模型与试验结果对比有较大的误差,主要原因是测试受人为因素影响较大,需进一步改进人为因素导致的数据离散性问题。仿真结果满足客户设定的拔出力矩要求,模型可以用于换挡机构零件设计分析。
[1]陈华,陈辛波,傅灵玲,等.自动变速器驻车机构性能分析与研究[J].拖拉机与农用运输车,2014,41(4):24-26.
[2]刘诗,曾俊.自动变速器驻车机构的性能研究及仿真优化[C]//2015中国汽车工程学会年会论文集.北京:机械工业出版社,2015:391-394.
[3]张玉文,李慧强.基于RecurDyn的自动变速器驻车机构P-R换挡性能的设计校核[J].轻型汽车技术,2012(10):34-37.
[4]王明成.CA7CH350D湿式双离合器式自动变速器关键部件设计与集成[J].汽车技术,2015(3):5-8+35.
[5]陈立平,张云清,任卫群,等.机械系统动力学分析及AD⁃AMS应用教程[M].北京:清华大学出版社,2005.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
格言·校园版(2022年18期)2022-07-06
汽车实用技术(2022年10期)2022-06-09
新视线·建筑与电力(2021年2期)2021-09-10
汽车零部件(2021年8期)2021-08-31
汽车技术(2021年8期)2021-08-24
船海工程(2021年4期)2021-08-17
直升机技术(2020年2期)2020-06-16
客车技术与研究(2019年6期)2019-12-24
文萃报·周二版(2018年27期)2018-10-21
