
一种坐式肢体协同运动康复机构的设计与分析
2018-03-05 12:31查海星胡保华
机械设计与制造 2018年2期
查海星,胡保华,王 勇
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
1 引言
根据世界卫生组织的统计数据,大约有10%的世界人口即6.5亿人身体存在不同残疾,并且这一比例随着人口老龄化程度的加深在持续增长[1]。脑损伤恢复理论[2]表明大脑具有可塑性,患者可通过适当的训练来刺激神经系统从而逐步恢复肢体的运动功能[3]。康复机器人应运而生,它是机器人技术与康复医学结合的产物,可以帮助治疗师从重复性的康复治疗工作中解放出来,让更多患者享受现代的医疗成果,并且研究[4]表明协同康复训练更有助于运动功能的恢复。
在康复工程领域,国内外科研工作者和医疗机构将上肢康复机器人和下肢康复机器人分开进行研究并取得一定的科研成果[5-6],在训练方式上有采用悬吊减重式、卧式、坐式、外骨骼式等。现有的康复机器人在设计上并没有专门针对肢体协同康复训练理论,并且采用悬吊方式下的训练使患者重心偏高、身体出现不稳定摆动现象,采用坐式则可避免该现象[7],外骨骼式操作复杂,圆周运动训练轨迹单一,不能满足大部分患者的需求,提出一种轨迹可调的坐式肢体协同运动康复机构,该机构由具有良好承载能力且可实现任意轨迹的曲柄滑块和具有零自由度的Ⅱ级杆组所形成的摇杆组合成,同时分析曲柄和支撑杆长度对患者康复训练中脚踏轨迹及关节活动度的影响。
2 机构设计
坐式肢体协同运动康复机构是将上肢康复训练和下肢康复训练结合起来。机构简图,如图1所示。其主要设计原理是应用复合连杆机构来实现上下肢的联动,其中下肢训练采用能够实现任意轨迹且刚度较好的曲柄滑块机构,上肢训练采用在下肢训练机构的基础上增加具有零自由度的Ⅱ级杆组所形成的摇杆机构。
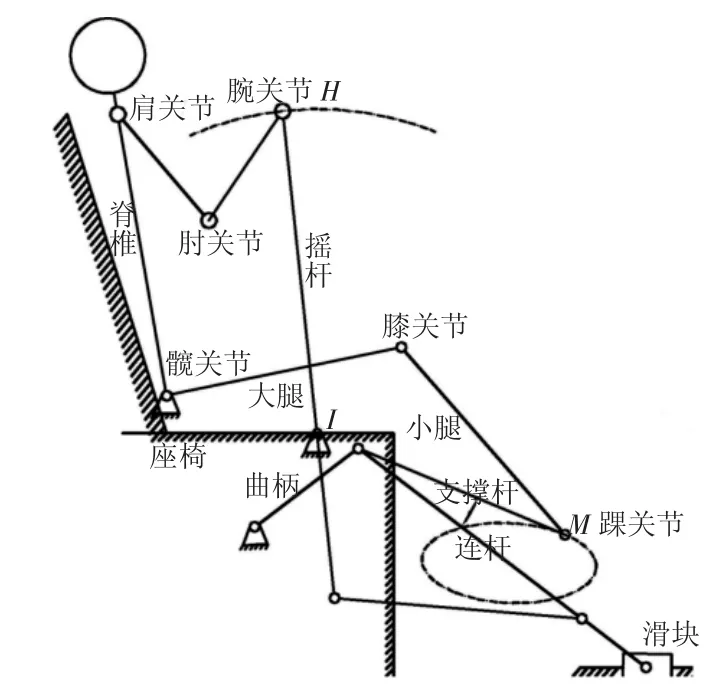
图1 肢体协同运动康复机构简图Fig.1 Diagram of Limbs Coordinated Training
在座椅的两侧对称布置了左右肢体康复机构,曲柄长度可调并且相位角相差180°,实现肢体的异步训练。该康复机构的支撑杆长度可调并且其一端与连杆固联,另一端安装脚踏,患者训练时将脚置于脚踏上并加以绷带固定,手部根据身高和坐姿握住摇杆上部的合适位置,康复训练时,电机带动曲柄做圆周运动,脚随着固定在连杆上的脚踏做类椭圆轨迹的运动,从而带动髋关节和膝关节的转动;连杆运动时带动着摇杆绕其转动中心I摆动,手部与摇杆接触点H随之做相应的圆弧轨迹运动,从而带动肩关节和肘关节的转动。
康复机构设计须遵循普适性、经济性和安全性的原则,且具有轨迹可调、幅度可变的功能,运动时脚踏轨迹幅度及各关节的活动角都应在极限范围内[8]。因此首先需根据患者的实际情况如身高、关节活动度等以及机构本身进行运动学分析,根据分析结果提取影响轨迹和关节活动角的主要因素,然后通过仿真分析各因素对肢体康复运动的具体影响,并提出实现轨迹可调,幅度可变的方案。
3 运动学分析
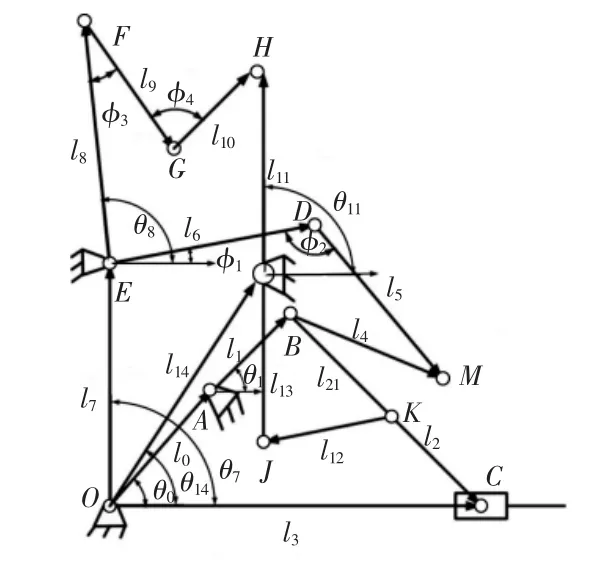
图2 复合连杆机构矢量模型Fig.2 Vector Model of Compound Link Mechanism
在康复训练中,患者的脚部与脚踏固联,运动时可根据实际情况调整到最佳运动状态,因此在进行机构分析时脚踏的转角可忽略。人体的上下肢可用平面二杆机构模拟,则康复训练机构与人体上下肢一起构成平面十杆机构,采用闭环矢量法进行运动学分析,如图2所示。以过髋关节的铅垂线建立Y轴,以滑块移动的方向建立 X 轴,建立坐标系 XOY。已知杆 l0、l1、l2、l21、l4、l5、l6、l7、l8、l9、l10、l11、l12、l13、l14和原动件转角 θ1,求解脚踏(M 点)、髋关节(E点)、膝关节(D点)、肩关节(F点)和肘关节(G点)的运动规律。
在复合连杆机构中存在四个闭环,分别为闭环OABC、闭环OABMDE、闭环OABKJI和闭环OEFGHI,根据机械原理的知识可列出相应的四个矢量方程,规定角θ以X轴的正向逆时针方向度量。
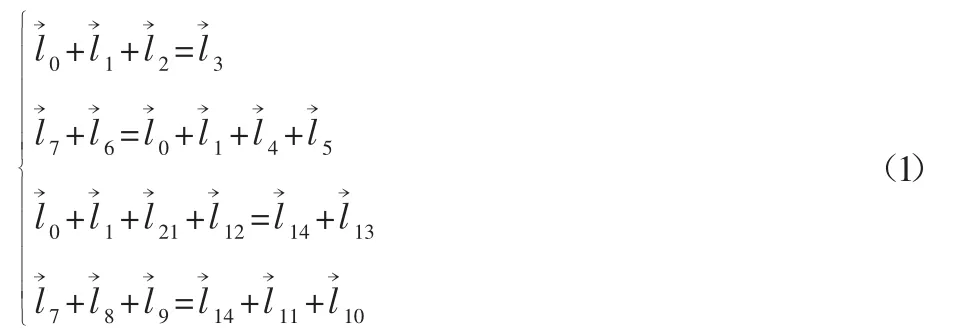
通过式(1)可以求出M点在OXY中的坐标(x,y)、髋关节角度φ1、膝关节角度φ2、肩关节角度φ3和肘关节角度φ4的代数方程:
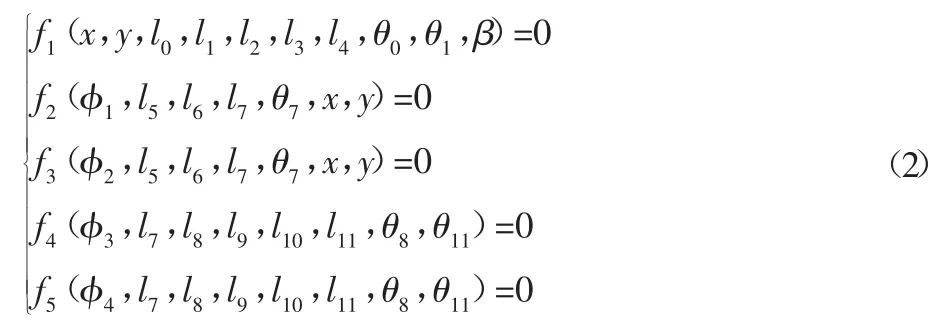
式中:θ11—摇杆摆角,其代数方程满足:

根据上述公式可以看出各关节的运动存在一定的协同运动关系,M点的轨迹主要受曲柄长度l1和支撑杆长度l21的影响,下肢髋关节和膝关节的运动又受到M点运动的限制;摇杆摆角θ11受曲柄长度l1的影响,而上肢肩关节和肘关节的运动受摆角θ11的限制。因此选取能够同时影响上肢和下肢运动的曲柄长度以及能较大幅度影响下肢运动的支撑杆长度进行分析。
4 仿真分析
坐式肢体协同康复机构的左右两套训练机构关于人体的矢状面对称,因此只对一套人-机训练机构进行仿真分析。座椅的高度范围为(380~450)mm,选取平均值415mm为椅面高度;根据我国男子成年人体比例关系,以身高1750mm患者为例,选取人体大腿l6=416mm、小腿及脚高l5=485mm、脊椎l8=490mm、上臂l9=320mm、前臂l10=340mm,并初步选定复合连杆机构尺寸参数:l0=215mm、l1=200mm、l2=640mm、l21=320mm、l4=480mm、l7=468mm、l11=465mm、l12=350mm、l13=465mm、l14=500mm。在ADAMS中建立人-机参数化模型,设置曲柄转速为30°/s进行分析。
4.1 曲柄长度对上肢运动的影响
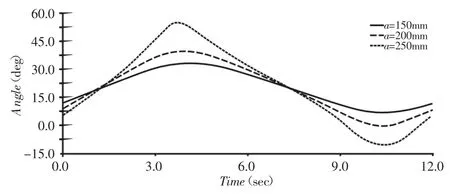
图3 曲柄长度对肩关节角度影响Fig.3 Effect of Crank Length on Shoulder Joint Angle
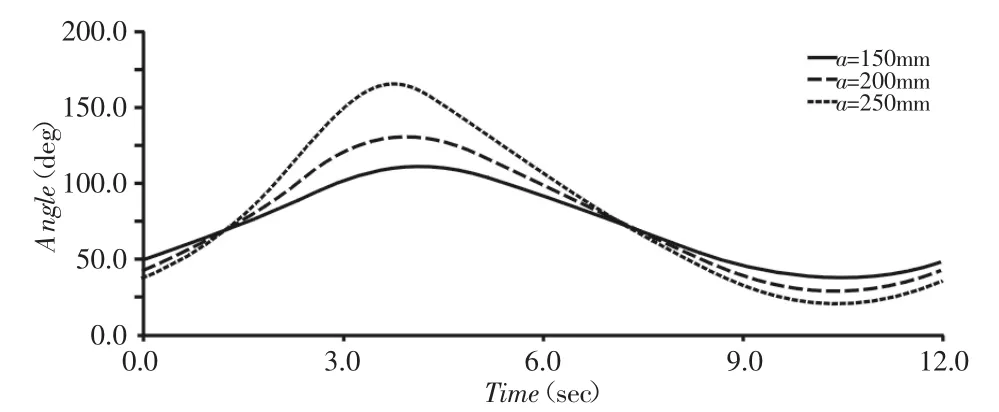
图4 曲柄长度肘关节角度影响Fig.4 Effect of Crank Length on Elbow Joint Angle
选取曲柄长度a分别为150mm、200mm、250mm,获得肩关节和肘关节角度曲线,如图3、图4所示,其中肩关节角度为上臂与脊椎夹角,肘关节的角度为前臂与上臂的夹角。
由不同曲柄长度下仿真获得的肩关节和肘关节角度曲线图可知,曲柄长度增大,肩关节和肘关节角度区间均增大。其中肩关节的角度区间由(6.9°,33.3°)增大为(-10.5°,55.2°),相应的角度幅值由 26.4°增大至 65.7°;肘关节的角度区间由(38.5°,110.2°)增大为(20.8°,167.1°),相应的角度幅值由 71.7°增大至 146.3°,均在人体肩关节和肘关节的活动度范围内[9]。通过分析可知,曲柄长度增大,连杆上K点在X方向的位移相应增大,与之连接的Ⅱ级杆组的摇杆摆角增加,而肩关节的位置不变,导致肩关节和肘关节转角均相应增大,以保证手部始终与摇杆顶端接触。采用调整曲柄长度的方法,能实现对肩关节和肘关节活动度的调整。
4.2 曲柄长度对下肢运动的影响
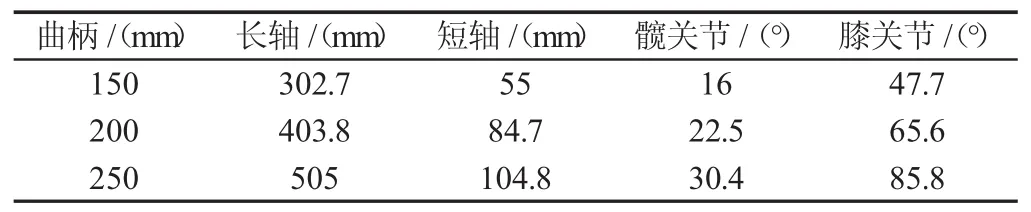
表1 不同曲柄长度下的下肢运动参数Tab.1 Kinematics Parameters of Lower Limb on Different Crank Length

图5 曲柄长度对M点轨迹影响Fig.5 Effect of Crank Length on M Trace

图6 曲柄长度对髋关节角度影响Fig.6 Effect of Crank Length on Hip Joint Angle
选取曲柄长度分别为150mm、200mm、250mm,获得了脚踏(M点)轨迹、髋关节和膝关节角度曲线以及下肢运动参数,如表1、图5、图6、图7所示。其中髋关节的角度为大腿与座椅面的夹角,膝关节的角度为小腿和大腿的夹角;为了便于研究脚踏(M点)轨迹变化规律,分别选取轨迹在X轴和Y轴上的极大值与极小值之差为长轴和短轴,其中长轴实现的是人在行走时步长的大小,短轴实现的是人在行走时角抬起的高度。由不同曲柄长度下仿真获得的M点轨迹、髋关节和膝关节角度曲线图可知,曲柄长度增大,M点形成的类椭圆轨迹和髋关节、膝关节角度区间都增大,轨迹近似为一簇长轴和短轴等比增大的同心类椭圆,其长轴由302.7mm增大至505mm、短轴由55mm增大至104.8mm,均在人体步长范围内[10];髋关节的角度区间由(9.3°,25.3°)增大为(-2.2°,28.2°),相应的角度幅值由 16°增大至 30.4°;膝关节的角度区间由(65.8°,113.5°)增大为(54.1°,139.9°),相应的角度幅值由 47.7°增大至 85.8°,均在人体髋关节和膝关节的活动度范围内。采用调整曲柄长度的方法,能实现对脚踏轨迹及髋关节、膝关节活动度的调整。

图7 曲柄长度对膝关节角度影响Fig.7 Effect of Crank Length on Knee Joint Angle
4.3 支撑杆长度对下肢运动的影响

表2 不同支撑杆长度下的下肢运动参数Tab.2 Kinematics Parameters of Lower Limb on Different Support Bar Length

图8 支撑杆长度对M点轨迹影响Fig.8 Effect of Support Bar Length on M Trace
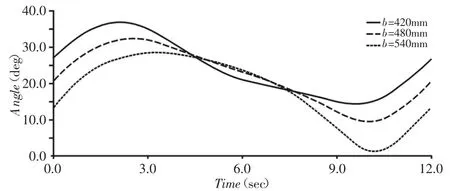
图9 支撑杆长度对髋关节角度影响Fig.9 Effect of Support Bar Length on Hip Joint Angle
选取支撑杆长度b分别为420mm、480mm、540mm,获取脚踏(M点)轨迹、髋关节和膝关节角度曲线以及相应的下肢运动参数,如表2、图8~图10所示。

图10 支撑杆长度对膝关节角度影响Fig.10 Effect of Support Bar Length on Knee Joint Angle
由不同支撑杆长度下仿真获得的M点轨迹、髋关节和膝关节角度曲线图可知,支撑杆长度增大,M点形成的类椭圆轨迹右移,长轴基本保持在400mm,短轴由120.6mm减小到40.8mm,均在人体步长范围内;髋关节的角度区间由(14.6°,36.9°)减小为(1.7°,28.5°),但相应的角度幅值由22.3°增大至26.8°;膝关节的角度区间由(49.3°,108.1°)减小为(64.7°,138.8°),但相应的角度幅值由 58.8°增大至74.1°,均在人体髋关节和膝关节的活动度范围内。通过分析可知,支撑杆长度增大,导致M点远离连杆与曲柄的连接点,根据曲柄滑块的性质,连杆上越靠近曲柄的位置,所形成的轨迹越近似圆,越靠近滑块,形成的轨迹近似直线,所以M轨迹呈现出右移且变扁的趋势;由于脚踏可以带动患者脚走到更远处,而髋关节所在位置不变,导致膝关节角度增大。采用调整支撑杆长度的方法,能实现对脚踏轨迹及膝关节活动度的调整,对髋关节角度调整效果不大。
5 结论
(1)基于复合连杆机构的坐姿肢体协同运动康复机构可以同时带动肩关节、肘关节、髋关节和膝关节在人体关节活动度范围内运动,并且脚踏处形成的类椭圆步态轨迹在人体步态范围内,可以实现上下肢的协同康复训练。(2)研究了曲柄长度、支撑杆长度对肢体运动的影响,增加曲柄长度,可以增大脚踏处形成的椭圆轨迹和上下肢关节的活动度;增加支撑杆长度,脚踏处形成的轨迹减小,相应的髋关节和膝关节的角度区间会变小,但角度幅值增大。可通过曲柄及支撑杆长度的调整,实现患者个性化康复需求。
[1]李光林,郑悦,吴新宇.医疗康复机器人研究进展及趋势[J].中国科学院院刊,2015(6):793-802.(Li Guang-lin,Zheng Yue,Wu Xin-yu.State of the art of medical and rehabilitation robotics and their perspective[J].Development and Application of Robotics Research,2015(6):793-802.)
[2]朱镐连.神经康复学[M].北京:人民军医出版社,2003:3-12.(Zhu Gao-lian.Nerve Rehabilitation Medicine[M].Beijing:People’s Military Doctor Press,2003:3-12.)
[3]王欣刚,官霞.运动再学习技术对脑卒中患者康复疗效观察[J].中国中医急症,2011,20(2):2026.(Wang Xin-gang,Guan Xia.The observation on rehabilitation in stroke patients with motion to learn technology[J].Chinese Medical Emergencies,2011,20(12):2026.)
[4]Kawashima N,Nozaki D,Abe MO.Shaping appropriate locomotive motor output through inter limb neural pathway within spinal cord in humans[J].Journal of Neurophysiology,2008,99(6):2946-2955.
[5]谢欲晓,白伟,张羽.下肢康复训练机器人的研究现状与趋势[J].中国医疗器械信息,2010(2):5-8+56.(Xie Yu-xiao,Bai Wei,Zhang Yu.Research on the lower limbs rehabilitative robot[J].China Medical Device Information,2010(2):5-8+56.)
[6]杨启志.上肢康复机器人研究现状的分析[J].机器人,2013(5):630-640.(Yang Qi-zhi.Analysis on state of the art of upper limb rehabilitation robots[J].Robot,2013(5):630-640.)
[7]王淮阳,王勇.对称五连杆下肢康复机构的设计与分析[J].机械设计与制造,2014(4):156-158+1.(Wang Huai-yang,Wang Yong.Symmetrical five-link design and analysis of the lower extremity rehabilitation agencies[J].Machinery Design&Manufacture,2014(4):156-158+1.)
[8]刘正士,张倩倩,王勇.基于五杆机构的下肢康复训练机构计[J].华中科技大学学报:自然科学版,2013(S1):309-311+3.(Liu Zheng-shi,Zhang Qian-qian,Wang Yong.Mechanism design of rehabilitation training robot based on the five-bar mechanism[J].Huazhong University of Science and Technology:Natural Science Edition,2013(S1):309-311+3.)
[9]纪树荣,运动疗法技术学(第二版)[M].北京:华夏出版社,2011:19-21.(Ji Shu-rong.The Technology of Therapeutic Exercises[M].Beijing:Hua xia Press,2011:19-21.)
[10]李香平,舒彬,顾小红.中国正常成人步行时空参数分析[J].中国康复医学杂志,2012(3):227-230.(Li Xiang-ping,Shu Bin,Gu Xiao-hong.Temporal-spatial parameters of gait reference data of normal subjects from Chinese adults[J].Chinese Journal of Rehabilitation Medicine,2012,27(3):227-230.)
猜你喜欢
设备管理与维修(2021年17期)2021-11-02
装备机械(2019年4期)2019-12-26
设备管理与维修(2019年22期)2019-12-19
中华肩肘外科电子杂志(2019年4期)2019-08-24
中国新闻周刊(2017年23期)2017-07-12
中国机械工程(2017年12期)2017-07-03
中南大学学报(自然科学版)(2016年2期)2017-01-19
铁道通信信号(2016年10期)2016-06-01
中华肩肘外科电子杂志(2016年2期)2016-01-23
中华肩肘外科电子杂志(2015年2期)2015-01-22
