增程式电动汽车控制策略的研究
2018-03-06 01:29宋光辉崔俊博
客车技术与研究 2018年1期
宋光辉, 崔俊博, 宋 杨, 李 楠
(浙江吉利新能源商用车有限公司 商用车研究院, 杭州 311228)
1 引 言
随着能源的日益短缺,新能源汽车近期得到了快速发展。其中增程式电动汽车的应用一方面可降低燃料消耗,另一方面可解决纯电动车续驶里程较短的问题。
增程式电动汽车的驱动能量来自增程器或动力电池,或者由增强器和动力电池同时提供。由于增程器与驱动轮无机械连接[1],增程器工作状态不受整车需求功率的影响,可以通过控制策略优化增程器的工作点以改善燃油经济性[2],达到降低燃料消耗的目的。目前增程器控制策略的主要思路分为两类:
1) 恒温器控制策略。增程器以恒定功率工作,此时增程器转速也固定,工作点可以在考虑整车需求功率的前提下固定为增程器的燃油经济点。
2) 功率跟随控制策略。发动机的工作点随着整车功率需求而变动,整车需求功率在增程器的输出功率范围内时,增程器的输出功率与整车需求功率保持一致,整车需求功率在增程器的输出功率范围外时,按增程器的最大功率工作。
对于第一类恒温器控制策略,控制起来比较简单,可以保证发动机工作在最优经济点,但动力电池处于频繁大功率充放电状态,且对于电池充放电性能要求较高,在个别工况下,增程器发出的功率大于驱动需求功率,此时增程器多余的功率需要给动力电池充电。后再经电池放电用于驱动车辆,效率损失较多[3]。
对于第二类功率跟随控制策略,发动机根据整车的功率需求可以在不同功率点工作,当整车需求功率较大,超过增程器的输出功率时,剩余功率由电池补充。此策略的缺点是发动机无法保证高效性,特别是在低转速及高转速工况下。此策略对动力电池充放电特性要求较低,但对发动机的性能要求较高。
除以上两种控制策略外,本文还研究了多点功率跟随控制策略。该策略综合考虑以上两种策略的优点,既能保证增程器在高效点工作,又能减少动力电池的深度充放电。具体思路为:增程器的工作点为定点,但不同于恒温器策略中的单个工作点,此策略中增程器的工作点为多个点,这些点涵盖了增程器的低、中、高功率点,且包含在增程器的高效区。高、低功率的选择考虑了动力电池过度放、充电工况及整车NVH等因素的影响。该策略基于整车功率需求、动力电池的SOC(荷电状态)值、车速、油门踏板开度等参数控制增程器的启停及工作点的切换。
2 增程式电动汽车控制策略的设计
本文中的控制策略研究主要针对混合驱动模式和行车发电模式。对于混合驱动模式,控制的核心是增程器和动力电池的功率分配,综合考虑增程器的高效区、动力电池放电功率范围及高效区、整车NVH性能要求等因素,确保增程器和动力电池都在高效区工作。对于行车发电模式,控制策略的制定主要考虑增程器的高效区、动力电池充电功率范围及高效区、整车NVH性能要求等因素,使增程器在提供驱动功率的同时,还能额外给动力电池充电,并确保动力系统的综合效率最高。控制策略的设计目标是在满足整车动力性、NVH等要求的前提下,提高整车的系统效率、降低燃料的消耗[4]。
2.1 增程式电动汽车工作模式
增程式电动汽车主要有3种工作模式:
1) 纯电动驱动模式。增程器系统不开启,动力电池系统给驱动电机提供电能。
2) 混合驱动模式。增程器系统和动力电池系统同时给驱动电机提供电能。
3) 行车发电模式。增程器系统给驱动电机发电的同时给动力电池充电。
增程式动力系统的3种工作模式中都具备再生制动功能,进一步提供续驶里程。
2.2 恒温器控制策略
1) 恒温器控制时主要考虑以下因素:
①增程器单点工作时,此发电功率可以提供驱动功率的同时给动力电池充电,保证在一定的行驶距离内动力电池不会出现大范围的馈电。
②增程器在此点工作时效率比较高。
③增程器的转速不能过低和过高,转速过低,难以保证高效性;转速过高,NVH性能较差。
2) 增程器工作点的确定:根据以上分析,最终恒温器控制策略中增程器的工作点定为30 kW,见图1中的B点,其中横坐标为转速(r/min),纵坐标为扭矩(N·m)。从图1中可以看出此点处于增程器的高效区,且转速适中,功率可以满足标准工况的要求。

图1 增程器工作点
3) 恒温器控制逻辑:恒温器控制策略主要根据动力电池的SOC进行控制,当SOC小于SOC_start时,增程器开启;当SOC大于SOC_stop时,增程器关闭;当SOC介于SOC_start和SOC_stop之间时根据上一时刻进行判断,具体逻辑见图2。增程器开启后,其工作点按照B点工作。
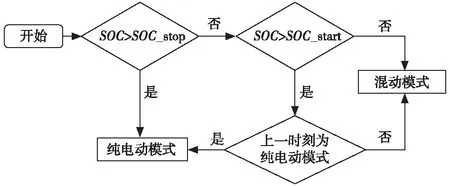
图2 恒温器控制逻辑
2.3 功率跟随控制策略
1) 功率跟随控制策略考虑的因素:
①增程器的输出功率和需求功率相当,尽量避免给动力电池充电。
②考虑整车经济性和NVH性能,增程器转速可以在5 000 r/min左右工作,但考虑到整车经济性和NVH性能,控制策略中增程器的工作转速限制在 1 250~4 000 r/min之间。
2) 增程器工作点的确定:通过在万有特性图中把增程器等功率曲线下的最经济点连接起来,得到增程器的工作曲线,见图3中的虚线。

图3 功率跟随增程器工作曲线
3) 功率跟随控制逻辑:功率跟随中增程器开启控制逻辑与图2中恒温器控制策略中的逻辑相同,只是增程器开启后其工作点按照整车需求功率沿图3中的虚线工作。
2.4 多点功率跟随控制策略
1) 多点功率跟随控制策略考虑的因素:
①合理设计增程器的开启控制逻辑,尽量减少增程器的启停次数。
②规定增程器开启后,定义增程器在各工作点的最短工作时间,减小增程器系统工作时的功率波动。
③考虑车速与整车NVH性能之间的关联,尽量在低速时,增程器不在高转速高功率点工作;在高速时,考虑风噪及轮胎噪声的影响,合理控制增程器的工作点。
④增程器工作点的选择还要考虑动力电池过充及过放的影响,保证增程式无论在那种工况下运行,动力电池不会出现过充和过放的情况,提高动力电池的使用寿命。
2) 增程器工作点的确定:考虑以上因素,增程器的工作点在30 kW(B点)的基础上增加A点15 kW和C点60 kW两个点,其中15 kW在低功率需求时工作,60 kW在高功率需求时工作。具体工作点见图1。
3) 多点跟随控制策略控制逻辑:增程器的状态在开启与关闭之间切换,考虑到增程器开启后要在3个工作点之间进行切换,控制策略中制定了相应的切换条件,当满足各工作点切换条件时切换为相应的工作点。控制策略使用Simulink/Stateflow进行搭建。具体见图4。

图4 多点功率跟随控制逻辑
条件1:SOC<25%或(P>60 kW且a>60%);条件2:SOC>60%且P<20 kW;条件3:50%>SOC>30%或(P>20 kW且a>15%);条件4:(SOC<35%且v>40 km/h)或(P>35 kW且a>30%);条件5:P<15 kW;条件6:P<15 kW;条件7:P<30 kW;条件8:(SOC<35%且v>20 km/h)或(P>35 kW且a>50%)。
其中:P代表30 s的平均需求功率;a代表加速踏板开度;v代表车速;SOC代表电池的荷电状态。
当整车满足条件1时,增程器开启,增程器先在工作点A工作,之后根据整车条件判断是否切换到工作点B或点C,3个工作点可以根据整车条件来回切换。当整车条件满足条件2时,增程器关闭。
以上恒温器、功率跟随、多点功率跟随3种控制策略除考虑以上因素外,还需要考虑以下共同因素:
1) 合理设定动力电池的SOC工作范围,设定的依据是首先满足国家节能补贴要求的纯电动续驶里程;增程器开启,尽量让动力电池在高效区工作以提高整车经济性;另外增程器启停的SOC范围不应过宽,以保证整车到达目的地时,尽量使用外接电网为动力电池进行充电。
2) 再生制动条件下,合理分配摩擦制动力和再生制动力[5]。根据需求制动力的大小,在确保制动安全的条件下,尽量让电机参与制动,回收能量。
3 整车动力性经济性仿真
通过AVL CRUISE软件与Simulink软件创建联合仿真模型[6-7],对控制策略进行可行性分析,根据仿真结果,选择最优的增程器控制策略。
3.1 仿真模型的搭建
通过Simulink/Stateflow搭建控制策略并生成DLL文件[8-9],在AVL CRUISE软件中搭建整车模型、完成模型与DLL文件数据接口的连接[10]。
3.2 仿真分析
根据GB/T 19754-2015《重型混合动力电动汽车能量消耗量试验方法》建立整车仿真任务[11],在满足整车动力性的前提下,重点关注电量平衡阶段的经济性。
按照标准中要求的C_WTVC工况,对整车的3种不同控制策略进行仿真分析。3种控制策略下车辆当前速度、目标车速的曲线如图5所示,通过曲线可以看出,仿真车辆的当前车速与目标车速吻合。

图5 C_WTVC工况下当前车速与目标车速曲线
3种控制策略下增程器的工作扭矩分别见图6、图7和图8,从图中看出,恒温器控制策略下增程器开启时,扭矩恒定;功率跟随控制策略下增程器开启时,其工作扭矩跟随整车需求扭矩变化;多点功率跟随控制策略下增程器开启时,其工作扭矩在3个值之间变化。

图6 恒温器控制策略下的增程器工作扭矩

图7 功率跟随控制策略下的增程器工作扭矩

图8 多点功率跟随控制策略下的增程器工作扭矩
3.3 仿真结果对比
虽然3种控制策略下动力电池的起始SOC相同,但由于控制逻辑和工作点的不同,仿真结束时动力电池的SOC值不同。由于最终经济性的优劣是按照油耗进行对比的,所以最终按照式(1)和式(2)将电量消耗量E(kW·h)换算到等效的燃料消耗量V(L)以计算汽车百公里等效燃油消耗(L/100 km)。
V=Vn±Ve
(1)
Ve=(360×ΔSOC×E)/(ρ×Hu×ηeng×ηgen×S)
(2)
式中:Vn为根据发动机燃油消耗量计算的百公里燃油消耗量,L/100 km;Ve为根据动力电池SOC变化量计算的等效燃油消耗量,L/100 km;ρ为燃油密度,kg/L;Hu为燃油的低热值,MJ/kg;ηeng为发电工况下发动机的平均有效热效率;ηgen为发电工况下发电机系统的平均工作效率;ΔSOC为SOC的变化值;S为行驶距离,km。
表1为仿真值与试验值。通过仿真分析,在满足整车动力性指标的前提下,3种控制策略的经济性以多点功率跟随最优,最终样车试验搭载的控制策略也为多点功率跟随策略,通过样车试验结果对比,仿真综合油耗误差小于2%,可以很好地指导控制策略开发。

表1 经济性仿真对比
4 结束语
本文通过AVL CRUISE软件搭建整车模型、使用Simulink软件完成控制策略模型,对某款增程式电动汽车的三种控制策略进行联合仿真。通过仿真分析,
得出在多点功率跟随控制策略下,整车在满足动力性的同时,其经济性最优。最终通过多点功率跟随控制策略在增程式电动汽车样车上进行搭载,并对比仿真与整车试验结果,验证了多点功率跟随控制策略的可行性与该仿真方法的精确性,同时验证该策略搭载某增程器电动汽车时,多点跟随控制策略在经济性上比恒温器和功率跟随控制策略更有优势。
[1] 喻皓.基于Cruise的增程式纯电动汽车仿真匹配分析[J].机电工程技术,2010,39(8):28-30.
[2] 候塞因.纯电动及混合动力汽车设计基础 [M].林程,译.2版.北京:机械工业出版社,2012:320-323.
[3] 乌日娜,魏跃远.增程式电动汽车整车控制策略研究与实现[J].自动化技术与应用,2014,33(5):29-32.
[4] Wei Liu.混合动力汽车系统建模与控制[M].殷国栋,等,译.北京:机械工业出版社,2015:158-159.
[5] 周苏,杨国,任宏伟,等.基于Cruise的燃料电池增程式电动汽车再生制动转矩分配策略研究[J].汽车技术,2015,46(4):46-51.
[6] 黄香儿.增程式电动汽车辅助动力单元控制系统的研究[D].上海:上海工程技术大学,2011.
[7] 刘乐.串联混合动力汽车建模与能源管理系统控制策略研究[D].长春:吉林大学,2011.
[8] 李献,骆志伟.精通MATLAB/Simulink系统仿真[M].北京:清华大学出版社,2017:170-172.
[9] 余胜威.MATLAB车辆工程应用实战[M].北京:清华大学出版社,2014:320-323.
[10] 胥帆.增程式电动汽车控制策略研究[D].锦州:辽宁工业大学,2015.
[11] 全国汽车标准化技术委员会.重型混合动力电动汽车能量消耗量试验方法:GB/T 19754-2015[S].北京:中国标准出版社,2015:10.
猜你喜欢
消费电子(2022年7期)2022-10-31
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
汽车工程师(2021年11期)2021-12-21
北京第二外国语学院学报(2021年2期)2021-08-13
智富时代(2018年8期)2018-09-28