
地铁列车空压机故障分析及逻辑优化
2018-03-06 02:25胡方阳
铁道机车车辆 2018年1期
胡方阳
(南京地铁运营有限责任公司, 南京 210012)
南京地铁1号线于2005年开通运营,随着客流量的日益增长,供车压力逐步增大,因此于2013年底启动了1号线车辆增购项目。13列增购车辆为6节编组A型车(A-B-C=C-B-A编组),中车南京浦镇车辆有限公司设计生产,牵引系统采用瑞士ABB方案,制动系统采用克诺尔EP2002方案。
2016年底增购13列车已全部到货并上线运营,车辆状态平稳,有效缓解了运营压力。增购车辆在初期运营中,出现了2台空压机同时不启动工作故障,对正线运营造成了较大隐患。由于2台空压机同时不工作,导致主风管压力逐渐低至紧急制动压力阈值(700 kPa),在正线产生紧急制动无法动车,最后导致清客事件。使用制动旁路(BBS)才得以动车至存车线,最终的制动系统主风管压力下降至500 kPa附近。由于停放制动从480 kPa开始触发,已接近触发停放制动压力值。
停放制动是充气缓解,排气制动。严重欠压状态(低于480 kPa)引起的停放制动,若要缓解,只有通过救援列车供气缓解或在车下手动拉动缓解拉环,这些都是在正线行车中一定要避免发生的极端情况。因此增购车辆空压机的启动逻辑存在缺陷,需要改进优化。
1 空气制动及风源系统控制简介
1.1 制动系统网络
增购车辆空气制动系统的网络拓扑结构见图1。由图1可见,制动系统每3节车组成一个CAN网络单元,全车共2个CAN网络单元,下挂在车辆MVB总线下。EP2002制动系统核心部件是网关阀(G阀)、智能阀(S阀)和远程输入输出阀(R阀)。由G阀进行本CAN单元的制动管理,其中一个G阀处于主通路状态,另外一个G阀处于热备状态[1]。
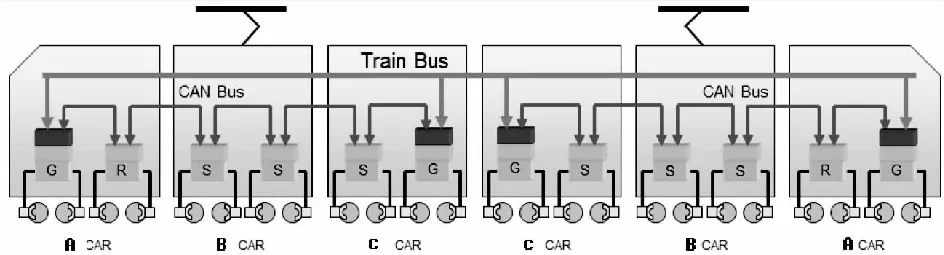
图1 制动系统网络拓扑图
1.2 空压机启动逻辑
全车共有2台空压机组(每个CAN网络单元管理1台),由R阀具体控制空压机的启停,并按TCMS(列车监测与控制系统)发来的日期的奇、偶数来区分主、次空压机。
现有逻辑为奇数日CAN1单元空压机为主,偶数日则CAN2单元空压机为主。车辆的时间基准由TCMS的主机——VCU(车辆控制单元)提供,VCU完成启动后即进行列车总线广播,实现整列车所有微机控制单元的时钟同步,并周期性发送时间(256 ms一次)。在ATC(列车自动驾驶)系统无故障并且ATC时间有效时,VCU实时时钟将由ATC设置,然后同步TCMS系统内各微机时钟。在列车唤醒后,制动系统两个CAN网络单元内G阀会收到TCMS发来的时间并作为基准,然后每个小时再更新一次时间,并以此为基准确定主次空压机。
在每个CAN网络单元的B车的一个S阀会直接与主风管相连接,用来检测主风管的压力值。当车辆控制管理系统(TCMS)正常时,2个CAN网络单元通过车辆的MVB网络进行通信,会将自己监测的压力值和网络传递来的压力值进行比较,取两者的小值作为主风管压力。当车辆TCMS故障时,2个CAN网络各自监测主风压力。当主风压力低于840 kPa 时主空压机启动;当主风压力低于750 kPa时次空压机启动;当主风压力高于或等于950 kPa时,主、次空压机均关闭。
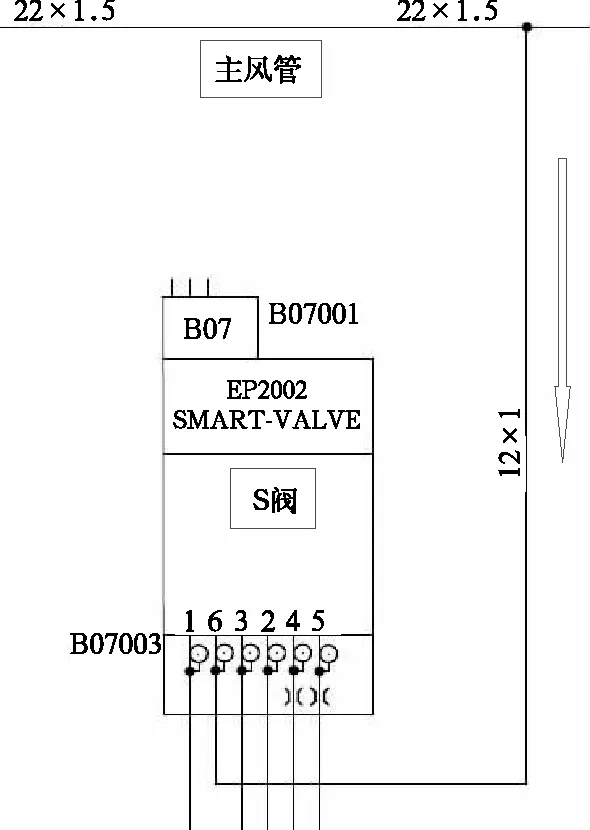
图2 主风管压力监测
1.3 空压机启动电路
如图3所示,R阀会根据接受网络发来的启动指令,当前日期,三相电是否可用等条件综合判定是否启动当前空压机。启动顺序是,首先R阀控制驱动继电器CDR得电启动,随即空压机启动接触器CMK得电闭合,最后空压机接通三相电启动。同时,当空压机启动以后,R阀会接收来自启动接触器CMK辅助触点信号,并上传网络,该信号用于判断空压机是否已启动。
当空压机启动时,干燥器也同时启动。干燥器内部设置2个压力开关用于监测干燥塔是否正常切换,当干燥塔内部压力高于270 kPa时,R阀会得到一个高电平信号,表示该干燥塔正常工作,若干燥塔异常也会导致空压机启动失败。
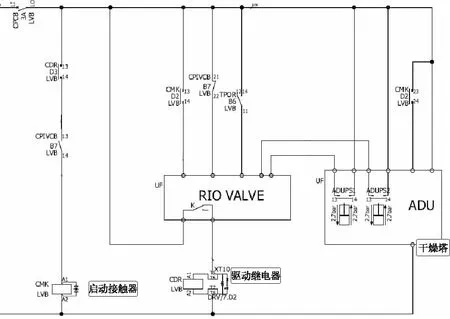
图3 空气压缩机启动电路
2 故障分析
故障发生后,下载2个CAN网络单元的故障记录显示,CAN1单元的时间与车辆VCU时间一致,为2015年11月10日,见图4,CAN1单元时间;而CAN2单元的时间出现异常,恢复到Unix系统(EP2002系统软件内核)的初始时间1970年1月1日,见图5,CAN2单元时间。
1970年1月1日是Unix系统的初始时间戳,只有在EP2002阀上电配置系统时才会出现,由此可以确定CAN2网络单元G阀出现了异常初始化现象,导致时间恢复到1970年,由于制动系统1 h才更新一次时间,就出现了1 h内2个CAN网络单元时间不一致情况[2]。
根据空压机启动逻辑,CAN1单元时间为11月10日,为偶数日,则CAN1单元空压机为次空压机,而CAN2单元时间为1月1日,为奇数日,则CAN2单元空压机为次空压机。这样就导致了2台空压机组都是次空压机。只有在主风管压力低至750 kPa时次空压机才会启动。但当时气压低于750 kPa时2台空压机并没有启动。
究其原因,本单元的空压机为次空压机时,会默认另外一个单元的空压机为主,为了避免两台空压机同时启动对辅助中压电网的冲击,另外一个单元空压机收到启动指令后,本单元空压机收到对方启动反馈信号后要滞后3 s启动。另外一个单元的空压机实际上也是次空压机,认为对方是主空压机,等待其启动后滞后3 s才启动,最后2台空压机相互等待对方启动,如此循环,导致了2台空压机在低于750 kPa时均不启动的故障。
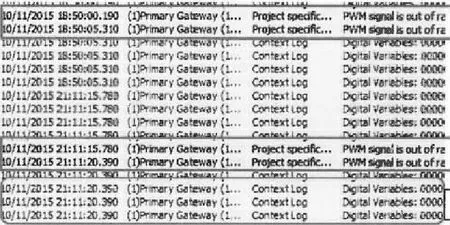
图4 CAN1单元时间
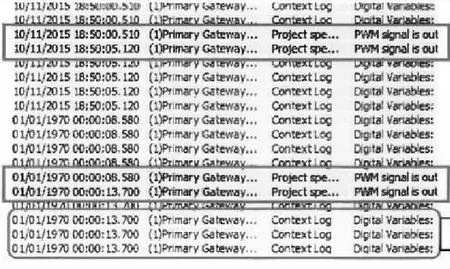
图5 CAN2单元时间
3 空压机启动逻辑优化
克诺尔对空压机的启动逻辑进行优化整改,从逻辑上杜绝这种事件的再次发生。1.2节阐述的空压机启动逻辑只是CAN网络正常状态下的逻辑,当出现2个空压机同时为次或同时为主的情况下如何进行空压机管理,如何避免2台空压机同时启动对电网的冲击,这是亟需解决的问题。经过南京地铁与克诺尔多次交流,最终确定了故障状态下空压机管理逻辑。
首先,制动系统检测到总风压力低于主、次空压机的启动压力值后启动空压机,启动指令通过驱动继电器发出来之前 ,空气制动系统先判断空压机的三相供电、干燥塔状态是否正常。都没有故障的情况下,延时Δt后便启动空压机,无需相互等待。
其中,Δt因空压机所处的位置及空压机的主次身份的不同而不同,当CAN1单元的空压机为主空压机,那么Δt=2 s;当CAN2单元的空压机为次空压机,那么Δt=5 s;当CAN2单元的空压机为主空压机,那么Δt=4 s;当CAN1单元的空压机为次空压机,那么Δt=7 s。
当CAN网络时间异常导致2台空压机都为主空压机,且主风管气压低至840 kPa时,2台空压机接收到启动命令后,会分别延时2 s和4 s启动,打风至950 kPa 停止;当CAN网络时间异常导致2台空压机都为次空压机且主风管气压低至750 kPa,2台空压机接收到启动命令后,会分别延时5 s和7 s启动,打风至950 kPa 停止;两种极端情况下2台空压机的启动也有2 s的时间差。取消了原先2台空压机相互等待的3 s时间差的逻辑,主次启动互不干扰,延时一定时间后立即启动,更为重要的是能够从理论上分时启动2台空压机,启动时间差至少2 s。
根据克诺尔提供空气压缩机的电气参数,空压机运行电流为13.4 A,空压机的启动冲击电流(rush current)为234 A,持续1.3 s。因此在极端情况即两台压缩机同为主或同为次情况下,2 s的启动时间差也能有效避免空压机同时启动对辅助中压电网的冲击。这样就妥善地解决了空压机不启动的问题。
4 结束语
车辆风源供给系统稳定工作对空气制动系统至关重要,也关系到运营的安全。如果车辆出现严重欠压,在正线施加了停发制动,会对正线行车产生很长的延误,这是地铁运营必须避免的。通过对南京地铁一号线增购车辆空压机故障的整改优化,妥善解决了故障隐患,也提高了业主、主机厂以及系统供应商协同配合解决问题能力,为增购车辆的稳定运用打下坚实的基础。
[1] 杜守忠,吴志明.EP2002制动系统的控制过程研究[J].电力机车与城轨车辆,2013,36(4):35-38.
[2] Fault analysis report of air compressor in Nanjing line1 added project[R].Suzhou.Suzhou KB,2015.
[3] 南京地铁运营有限责任公司.南京地铁1号线增购车辆维护手册[R].南京,2013.
猜你喜欢
建材发展导向(2021年11期)2021-07-28
水泥工程(2020年3期)2020-10-28
船海工程(2020年6期)2020-01-03
装备制造技术(2019年12期)2019-12-25
海峡姐妹(2019年6期)2019-06-26
商品与质量(2018年49期)2018-05-25
科学与技术(2018年12期)2018-04-25
电子制作(2017年17期)2017-12-18
农家科技中旬版(2016年1期)2016-03-03
现代企业(2015年4期)2015-02-28
