
动力学特性的矿井提升机载荷辨识研究
2018-03-21 05:47时安琪杨兆建马金山
机械设计与制造 2018年3期
时安琪 ,任 芳 ,杨兆建 ,马金山
(1.太原理工大学 机械工程学院,山西 太原 030024;2.煤矿综采装备山西省重点实验室,山西 太原 030024)
1 引言
伴随着矿山机械的发展和技术的进步,矿井提升机也正朝着大型、高速、重载与智能化的方向发展,对矿井提升机的工作性能也提出了越来越高的要求[1]。在多数情况下,由于受技术条件和工作环境的限制,作用在矿井提升机上的动载荷难以直接测量,但是相对而言,提升机在动载荷作用下的动态响应是比较容易测得的。探索用动力学的方法研究提升机载荷辨识问题,即根据结构在动载荷作用下的动态响应来确定动载荷的过程[2]。探索通过动力学特性辨识提升机系统动载荷的方法,为提升机系统动力学设计和故障诊断等提供依据。
2 模型的简化与建立
2.1 物理模型的简化
矿井提升机的传动系统是由电机、减速器与主轴装置组成,由联轴器连接的传动系统,其系统的本质是一个多支撑多圆盘的转子系统。目前,传递矩阵法是计算多支撑多圆盘转子系统转子动力学问题的一种有效方法。根据转子系统动力学传递矩阵法的假设:圆盘是有质量和转动惯量而无厚度无变形的刚性薄圆盘,轴段是有刚度和长度而无质量的弹性轴[3]。把电机、减速器、以及主轴装置进行质量集中,等效为刚性薄圆盘,得到三自由度转子系统。由于减速器为齿轮传动,所以传动系统为齿轮传动轴系,传动系统可简化为等效直列轴系[4]。把齿轮系等效到电机上,得到两自由度转子系统示意图,如图1所示。
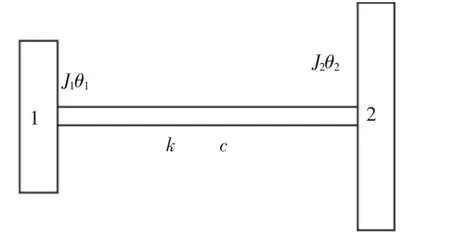
图1 两自由度模型Fig.1 2-Degree Model
图中:1、2—电机、主轴装置等效圆盘;J1、J2—1、2 等效转动惯量;
θ1、θ2—1、2 角位移;k—等效刚度;c—等效阻尼。
2.2 数学模型的建立
运用拉格朗日方程是求解复杂刚体动力学问题的一种有效方法,特别的适于物理理论的研究。把转子系统看做一个整体,结合系统的动能和势能,由拉格朗日方程针对三自由度物理模型建立系统的三自由度运动微分方程数学模型[5]为:

两自由度物理模型建立两自由度运动微分方程数学模型为:

式中:M1—电机施加的驱动扭矩载荷;M2—制动器施加在主轴装置上的干扰力矩载荷。
3 Matlab/Simulink仿真
根据数学模型,利用Matlab/SimilinkLibrary的模块建立仿真模型,为避免复杂的连线,增强模型的可读性,对仿真模型进行封装,用Goto模块进行数据传输[6],仿真模型,如图2所示。图中黄色部分为电机模型,灰色部分为转子系统机械传动模型,Subsystema为两自由度的机械模型,Subsystemb为三自由度机械模型。仿真时间设置为10s,系统运行稳定以后开始加载干扰力矩,加载信号为频率10Hz,幅值10N.m,偏移量10N.m的正弦载荷,加载时间为(5~10)s。电机及主轴装置等效角速度在两自由度和三自由度模型的仿真后对比图像和加载后驱动力矩变化情况,如图3所示。由图3可看出加载后两种模型在运行稳定以后运动状态基本保持一致(ω1、ω3分别为两自由度、三自由度模型电机角速度,ω2、ω4分别为两自由度、三自由度模型主轴装置等效角速度),表明可以用两自由度的模型来代替三自由度模型简化分析。

图2 转子系统机电仿真模型Fig.2 Mechanical and Electrical Simulation Model


图3 加载后曲线变化Fig.3 Curves Variation after Loading
4 支持向量机回归分析与载荷识别
4.1 支持向量机模型的构建
支持向量机在回归分析中,参数的选取,尤其是惩罚参数c与核函数参数g的选取,对模型回归的精度影响很大。仅采用经验法,能得到精度较大的回归结果,但是很难得到最优的结果,这里采用遗传算法寻优来选取c、g值,以得到最佳输出[7-9]。支持向量机的输入为电机与主轴装置角速度构成的二维数据,输出为载荷构成的一维数据;采用最大最小法把数据归一到[-1,1]区间内,避免各维数间数据过大的数量级;采用pca降维的方法把数据全降为一维数据,便于分析;采用交叉验证的方法对SVM中惩罚参数c与核函数参数g进行评估,遗传算法的适应度函数值则选取交叉验证中计算得到的每组惩罚参数c与核函数参数g,从而在一定的区间内全局寻优,得到最佳c、g值[10]。采用5折交叉验证,设置种群数量10,进化代数100[10],得到制动力矩-适应度曲线,如图 4(a)所示。最佳 c=54.773,g=99.3569,交叉验证的均方误差为0.013909,得到的参数值较好;采用同样的模型以及参数设置得到驱动力矩-适应度曲线,如图4(b)所示。最佳c=11.1771,g=50.1154,交叉验证的均方误差为0,得到的了最佳值。

图4 适应度曲线Fig.4 Fitness Curves
4.2 支持向量机的识别结果
对于制动力矩,输入选取(6~7)s的前两个周期的 ω1与 ω2,输出为相应的制动力矩载荷值,用训练制动力矩时的最佳的c、g值,结合支持向量机模型,计算得到载荷的原始曲线与回归曲线对比图,如图 5(a)所示。均方误差为 0.0094396,相关系数 r2=0.99339,表明回归模型性能较好。(6~7)s的第三个周期的载荷真实值与识别值的对比图,如图5(b)所示。均方误差为0.008904,相关系数r2=0.99445,角速度与制动力矩的真实值、识别值的对比,如表1所示。最大误差为1.005N.m,识别效果较好,表明该模型对矿井提升机制动力矩载荷具有良好的学习能力和识别能力。对于电机的驱动力矩,输入选取(6~7)s的前两个周期的ω1与ω2,输出为相应的驱动力矩载荷值,利用训练驱动力矩时的最佳的c、g值,结合上述相同的支持向量机模型,计算得到载荷的原始曲线与回归曲线对比图,如图6(a)所示。均方误差为 0.0096683,相关系数 r2=0.98756,表明回归模型性能较好。(6~7)s的第三个周期的载荷真实值与识别值的对比图,均方误差为 0.0097938,相关系数 r2=0.98916,如图 6(b)所示。

图5 制动力矩的回归与识别Fig.5 Regression and Recognition of Braking Torque

表1 角速度、制动力矩真实值与识别值Tab.1 The Angular Velocity,the Real Value and Recognition of Braking Load

图6 驱动力矩的回归于识别Fig.6 Regression and Recognition of Driving Torque
角速度与驱动力矩的真实值、识别值的对比,如表2所示。最大误差为0.070N.m,识别效果良好,表明该模型对矿井提升机驱动力矩载荷具有良好的学习能力和识别能力

表2 角速度、驱动力矩真实值与识别值Tab.2 The Angular Velocity,the Real Value and Recognition of Driving Load
5 结论
(1)根据传递矩阵法原理合理简化了矿井提升机传动系统,并建立了两自由度和三自由度的运动微分方程。(2)通过仿真分析结果,两自由度模型与三自由度模型在运行稳定以后运行状态基本一致,可以用两自由度的模型代替三自由度模型以简化分析。(3)用遗传算法优化的支持向量机对制动力矩与驱动力矩进行了载荷辨识,相关系数分别为0.99445与0.98916,识别结果良好。表明支持向量机可以对矿井提升机载荷作定量识别。
[1]严世榕,闻邦椿.矿井提升系统的动力学研究[J].金属矿山,1998(5):31-33.(Yan Shi-rong,Wen Bang-chun.Investigation on the dynamics of the winding system in mine shaft[J].Metal Mine,1998(5):31-33.)
[2]杨智春,贾有.动载荷识别方法的研究进展[J].力学与实践,2015(1):164.(Yang Zhi-chun,Jia You.The research progress of dynamic load identification method[J].Mechanics in Engineering,2015(1):164.)
[3]袁慧群.转子动力学基础[M].北京:冶金工业出版社,2013.(Yuan Hui-qun.Rotor Dynamic Foundation[M].Beijing:Metallurgical Industry Press,2013.)
[4]方同.振动理论及应用[M].西安:西北工业大学出版社,2002.(Fang Tong.Vibration Theory and Application[M].Xi’an:Northwestern Polytechnical University Press,2002.)
[5]恒放.矿井提升机的动载响应研究[D].重庆:重庆大学,2010.(Heng Fang.Research on dynamic response of mine hoist[D].Chongqing:Chongqing University,2010.)
[6]翟亚宁,杨兆建.基于小波包能量谱和BP神经网络的转子系统扭矩激励识别[J].中国农机化学,2015(3):194-198.(Zhai Ya-ning,Yang Zhao-jian.Torque incenrive identification of the rotor system based on wavelet packet energy spectrum and BP neutral network[J].Journal of Chinese Agricultural Mechanization,2015(3):194-198)
[7]Xu Chun-bi,Liu Jing-cheng,Li Jun.Forecast model for gas well productivity based on GA and SVM[J].Applied Mechanics and Materials,2011(8):4958-4962.
[8]Jiang Xue-peng,Dai Yu-jin,Hong Bei.SVM model based on GA optimization for inertial prediction[J].Journal of Nanjing University of Science and Technology,2011(7):34-39.
[9]曹善成,宋笔锋,殷之平.基于支持向量机回归的飞行载荷参数识别研究[J].西北工业大学学报,2013(4):535-539.(Cao Shan-cheng,Song Bi-feng,Yin Zhi-ping.Study on flight load parameter identification based on SVM[J].Journal of Northwestern Poytechnical University,2013(4):535-539.)
[10]史峰,王小川,郁磊.MATLAB 神经网络30个案例分析[M].北京:北京航空航天大学出版社,2010.(ShiFeng,WangXiao-chuan,YuLei.ThirtyNetworkCasesAnalysisBased on MATLAB[M].Beijing:Beijing University of Aeronautics and Astronautics University Press,2010.)
猜你喜欢
山东冶金(2022年4期)2022-09-14
中国特种设备安全(2022年2期)2022-07-08
电子乐园·上旬刊(2022年5期)2022-04-09
中学生数理化·高一版(2017年3期)2017-07-08
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
火控雷达技术(2016年1期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
中国铁道科学(2015年4期)2015-06-21
中国高新技术企业(2015年13期)2015-04-30
