基于Proteus的无刷电机系统仿真研究
2018-03-30 02:26王伟石欢欢刘海强时洋洋
电子技术与软件工程 2017年16期
王伟 石欢欢 刘海强 时洋洋
摘要
本文介绍了无刷直流电机(Brushless DC Motor,BLDCM)的工作原理,分析了其换相逻辑,对电机系统在Proteus环境下进行了建模和调试,在此基础上对电机开环系统的工作性能进行了仿真和分析,并着重设计和实现了基于Arduino单片机的转速闭环系统。通过仿真结果,验证了该电机具有良好性能,控制系统设计合理,具有可行性。
【关键词】无刷直流电机 Proteus PID算法
目前,工业上常用的电力拖动系统包括同步电动机、异步电动机、有刷直流电动机、无刷直流电动机等,其中交流机占主导地位,特别是异步电动机。但在有些领域上,异步电动机暴露了其自身功率因数滞后,轻载功率因数低,调速性能稍差等缺点。因此在调速性能要求较高的大型设备如乳钢机,都采用有刷直流电动机拖动,但其存在着直流换向问题,结构复杂且不方便维护维修。近年来无刷直流电动机及其控制技术发展迅猛,有效地解决了有刷直流电机的主要缺陷。无刷直流电动机取消了普通直流电电机的滑环、碳刷结构,绕组多采用三相星形接法,转子为永磁体,并具有检测转子位置的霍尔传感器。电机具有直流电动机的所有优点,并具有体积小、重量轻、出力大、结构简单、响应快、启动转矩大、转矩恒定等诸多优点。因此,BLDCM以其卓越性能,在越来越多的拖动和伺服控制场合替代现有的直流调速电机、变频电机、以及异步电机等,成为性价比最高的选择。
Proteus是英国Labbcenter公司开发的电路分析与仿真软件,可以分析各种模拟器件和集成电路,具有模拟电路、数字电路仿真、单片机及外围电路仿真功能。
1 BLDCM工作原理
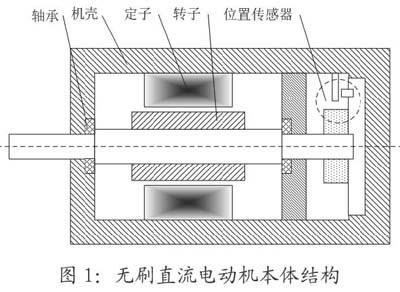
无刷直流电动机作为一种典型机电一体化产品,由电机本体、逆变电路、控制器、及位置传感器组成的电动机系统。控制器通过对位置传感器检测出的转子磁极位置信号进行逻辑整合后可以得到逆变电路各功率开关管相应的触发信号,从而使电源功率按逻辑分配给各相定子绕组,电机产生顺向电磁转矩。
无刷直流电机本体结构如图1所示。
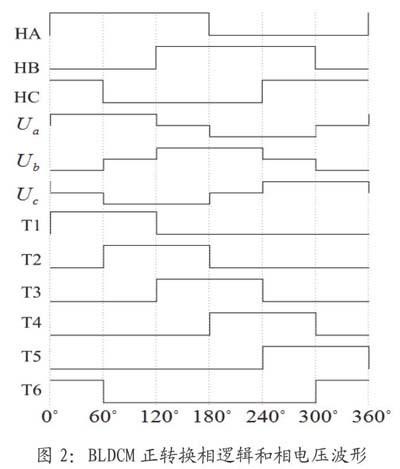
每次换相过程中,电机三相绕组中会有一相绕组接电源正,另一相绕组接负,第三相绕组失电,绕组电流从接正端流入,接负端流出。通电的定子绕组会产生磁场,该磁场与转子永磁体互相作用会产生电磁转矩。理想状态下,电磁转矩峰值出现两个磁场正交时,而在两磁场平行时最弱,转子会向着与定子磁场方向平行的方向转动。因此,当定子绕组产生的磁场不断变换位置时,转子会受到顺向磁拉力的作用,从而实现固定方向的旋转运动。霍尔位置传感器信号(HA、HB、HC),通过改变逆变器功率开关管的导通顺序,可实现电机正转(顺时针)或反转(逆时针)。BLDCM正转时,在一个360°的通电周期内,霍尔信号HA、HB、HC与逆变器功率器件(T1?T6)之间的换相逻辑和对应的三相绕组相电压(Ua、Ub、Uc)波形如图2所示。电机反转时,情况类似推理。
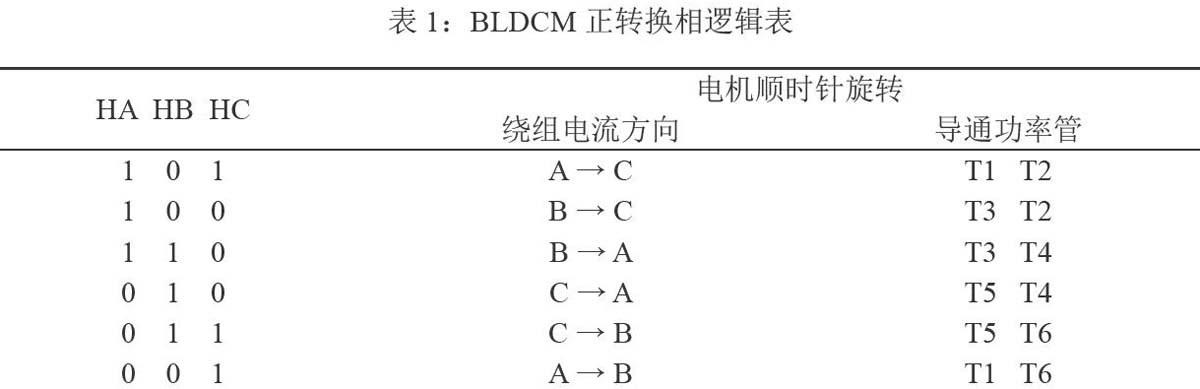
表1给出了Y连接两相导通三相六状态无刷直流电机正/反转时的换相逻辑关系和绕组电流方向。
当电机正转时,六只功率管的导通顺序是:Tl、T2→T3、T2→T3、T4→T5、T3→T5、T6→Tl、T6,依次循环。在电机正转,功率管Tl、T2导通时,电流从直流电源正极开始,依次流过T1管、A相绕组和C相绕组,并经T2管流回电源地,其他功率管导通时情况类似。因此,根据上述逻辑关系可以得到各开关管的控制逻辑表达式如下式(1)所示。
2 开环系统建模与仿真
根据无刷直流电机工作原理,在Proteus环境里对无刷直流电机开环系统进行仿真。Mechanical器件库支持星形连接、三角形连接方式,本文采用星形连接方式的无刷直流电机BLDC-STAR。
根据电机仿真参数,电源选择24VDC,主功率电路中的功率开关管选用型号为IRF540的MOSFET。电机霍尔传感器输出信号为HA、HB、HC,根据公式(1)采用与门、非门对霍尔信号进行逻辑运算,将运算结果T1?T6分别接MOS管的门极,得到BLDCM开环仿真模型如图3所示。
运行系统,得到电机开环转速和相电流波形图如图4、5所示。根据图4仿真波形可知,电机的开环额定转速为730r/min,系统稳态响应良好;电机起动时间和起动转速超调在可接受范围内且稳态转速波动较小,系统动态性能较好。
由图5仿真波形可知,电机的电流稳态波形良好,波动较小且毛刺较少,启动过程也基本平稳。
根据仿真结果可知,该电机的稳态和动态性能良好,可满足一般运动控制系统要求。
3 闭环系统建模与仿真
BLDCM闭环控制系统需要用到模拟量采集,外部中断计数,PWM输出功能,主控芯片选择了Arduino单片机。Arduino是一款使用AtmelAVR单片机的开放性单芯片控制器,片上含有丰富的资源,具有输入捕获、输出比较、PWM模式、串行UART通信等功能,支持内置数模转换ADC。闭环控制还需要用到脉冲宽度调制技术(Pulse Width Modulation,PWM),将模拟给定信号转换为周期固定,占空比依模拟信号大小而变化的数字控制信号。
BLDCM有多种斩波方式,此处采用“PWM-ON”方式或“上斩下不斩”方式,即逆变桥上桥臂的三个开关管采用PWM斩波,下桥臂采用正常导通方式。利用Ardino的109口产生PWM信号,将其与控制信号Tl、T3、T5相与,从而实现电机转速闭环控制,仿真模型如图6所示。
针对于电机调速,我们采用比例积分的方式调节:
在程序中e(k)是预设速度值与实际速度值得偏差,积分项e(k-l)是本次速度偏差与上次速度偏差的差值。
在Proteus中实现的关键程序如下:
其中,给定值SetPoint是电位器分压经AD转换后的值,原参数范围是0?1024之间,在仿真中我们对其进行映射为转速0?600r/min,Pulse为仿真中实际电机转速。
程序运算输出值关键在于确定Kp与Ki,首先确定Kp的值,先不加积分环节,比较不同Kp值对电机转速的影响,依照超调量不能过大、响应时间不能过长的原则确定Kp值取值范围,之后加上积分环节,调节Ki值,确定最佳的Kp和Ki值。
经调试,Kp值设置为0.3,Ki值设置为0.15,电机响应效果最佳。如图7所示的是在此控制参数下,给定转速为300时,电机实际转速波形。分析仿真波形可知,闭环系统中,电机转速从0开始逐渐爬升并逐步稳定到给定转速300r/min,在此过程中,存在一定超调量,调节时间相对较短,系统具有良好的转速闭环特性,稳态和动态性能良好。
4 结论
本文对无刷直流电动机的工作原理、运行方式以及闭环调速系统进行了分析,并在Proteus中对系统进行了开环控制和闭环调速仿真。经验证,系统具有良好稳态和动态性能,适合用于运动伺服控制系统。通过分析總结无刷直流电动机调速系统的工作方式、调速方法及可能遇到的问题,为下一步进行实物设计打下了基础。
参考文献
[1]朱杰.基于PIC16F1933的无刷直流电机控制器的研究与实现[J].科技风,2013,24(10):40-42.
[2]林明耀,陈华锋等.永磁无刷直流电动机的控制技术研究综述[J].机械制造与自动化,2016,6(06):1-3.
[3]钟炜,李泽滔.基于AT89S52单片机的电子记分牌设计[J].现代机械,2015,6(01):83-86.
[4]王林涛.BLDCM驱动的电动门控系统的研究[D].上海:上海交通大学,2008.
[5]王淑红,熊光煜.无刷直流电动机特性有限元分析[J].微电机,2007,12(06):42-45.
[6]高辉,姚莉莉.“六步换向”法控制无刷直流电机设计[J].防爆电机,2012,6(04):3-5.
猜你喜欢
计算技术与自动化(2016年2期)2016-07-20
科技传播(2016年10期)2016-07-15
现代电子技术(2014年14期)2014-07-24