
基于遗传算法的机械传动决策的建模与仿真
2018-03-31 12:22栗鹏飞
电脑知识与技术 2018年6期
栗鹏飞


摘要:针对传统机械传动方案建模困难问题,利用遗传算法对机械传动方案进行辨识和建模,运用最新方法对其建模过程进行处理,通过Matlab仿真证明了利用遗传算法建立模型的有效性和决策的可行性,为机械传动方案的优化提供了新的模型。
关键词:遗传算法;机械传动;决策;建模
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2018)06-0147-03
1引言
对于传统的机械系统的传动方案的建模和设计,往往是根据设计人员的经验来确定,这就存在诸多不确定的主观因素和不准确的决策发生,再加上传动系统的复杂性导致的系统建模存在一定的难度。近年来,遗传算法,免疫算法,粒子群算法等智能算法日益兴起并得到广泛应用,使得复杂问题变得越来越简单,同时也提高了应用对象执行的准确度,如果将这些智能算法应用于机械传动方案设计中,可以解决计算过程复杂,计算量大等问题。文献[1]提出实数编码的遗传算法解决斜齿轮传动优化问题,以体积最小为目标函数,确定各种约束条件,得到最优结果;文献[2]将模拟退火思想引人具有杂交和高斯变异的粒子群算法中,将模拟退火粒子群算法与可靠性设计理论结合建立最大化减速器传统系统可靠度优化模型。
本文建立多物元模型,然后利用遗传算法的自适应性和较高的容错能力等优点对机械传动方案进行辨识,并且通过MATLAB的仿真验证了模型的可行性,仿真结果表明该算法收敛速度快,模型精确,为机械传动方案设计提供了一种新的方案。
2机械传动方案的模型
一般而言,对于机械方案的优化问题往往是转化为复杂的数学公式,通过对其进行分析建立数学模型,这种形式在传统传动方案中得到很好应用,但是这种方法很难或者无法描述设计的咪表函数,基于此本文将设计方法的目标函数用物元形式描述。该方法将传动过程中的指标,如效率,平稳性,寿命,环境适应性,成本等作为描述传动方案的物元模型用R表示
3决策模型的辨别
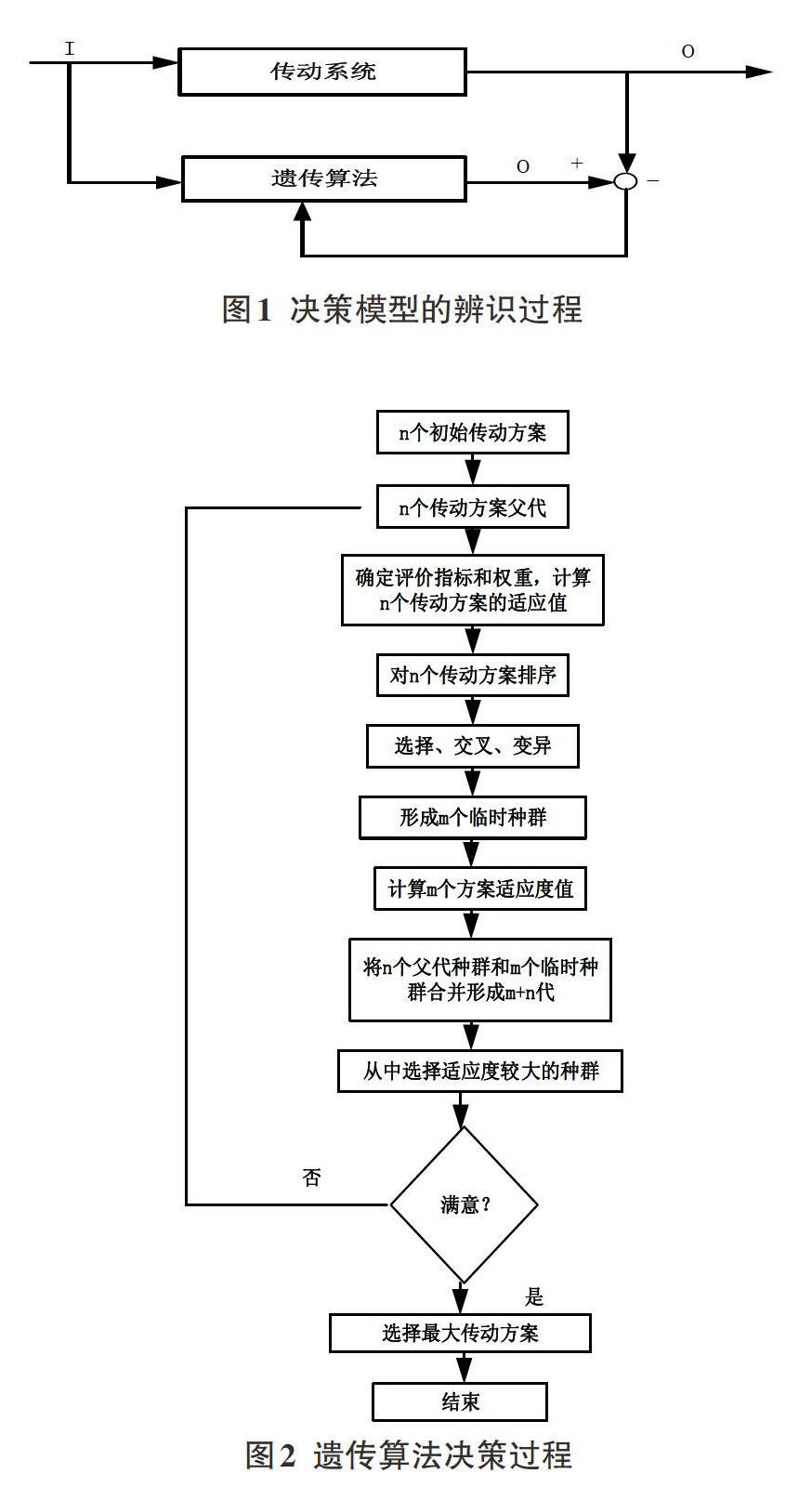
系统辨识方法按照类型可分为:第一,传统系统辨识法,使用理论分析确定系统的模型,常用于线性模型的辨识,如极大似然估计法,最小二乘法;第二,新型系统辨识法,利用遗传算法、模糊理论等知识进行辨识,常用于非线性系统的建模。针对机械传动的特点,本文采用人工智能辨识对模型进行辨识,通过输入和输出的数据,直接辨识输入输出关系,从而达到对机械系统传动方案进行整体辨识,如图1所示。
4基于遗传算法的机械传动决策
遗传算法(Genetic Algorithm)于1975年美国J.Holland提出的一类借鉴生物界进化规律的演化而来的随机搜索方法,具有收敛性好和全局寻优能力强特点,采用概率化的寻优方法,能够自动获取搜索空间并向着最优方向进化,无需预先确定规则,通过编码、选择、交叉、变异等操作产生代表最新解的种群,通过不断更新不断进化使得后代的种群比前代更适应环境,通过不断的迭代寻优最终找到最优解。该算法已经被广泛地应用于机器学习,自动控制,优化理论等领域。
从传动方案的优化模型来看,每个设计目标不是数学表达式而是定性的评语,因此用传统的优化方法有一定难度,由于遗传算法求解问题无需严格数学表达式,因此采用遗传算法将定性问题描述转化为定量问题分析,然后进行建立目标函数,通过对目标函数最值求解,转化为最优问题,具体的求解策略如图2所示。
4.1适应度计算
适应度作为方案优劣程度的重要指数,在机械传动方案中常常把关联度作为方案设计的目标函数,其计算过程如下,每个传动方案自身的传动就作为一个物元,取传动方案第i个特征量值μi作为两级传动机构第i个特征量值的平均值
4.2选择操作
选择的要求是适应度越大的个体被选择概率就越大,因此适应度值是种群選择的动力,每次计算出的适应度值作为历史保留,前后两代种群通过适应度值的对比有目的有方向的进行繁殖后代,即,适应度值大的被保留下来繁殖后代。
4.3交叉操作
交叉是遗传算法的关键,是保证优良基因传承下去的保证,通常有单点交叉、多点交叉等方法,本文采用单点交叉,即,随机选择编码的一个交叉点,然后交换子代1和子代2的两段待交叉片段,经过重新组合形成新的子代,交叉操作一方面保持了进化种群的多样性,另一方面保持了父代的优良基因有利于种群发展的方向。交叉概率pc一般位于0.5-1.0之间。
4.4变异操作
在进化的过程中由于各种原因会导致基因突变,突变之后的种群不但有利于保持种群的多样性增加选择的机会,同时也有利于控制算法早熟现象。在进化过程中规定:如果突变部位是机构代码基因位,则染色体总传动比保持不变,否则,就发生变化。变异概率pm一般在0-0.1之间取值。
5仿真实验
假如在某个传动方案中,要求传动功率为5KW,传动效率高于8.7,输入转速1000r/min,输出转速90dmin,选择传动方案要求:工作尺寸紧凑,工况良好,传动效率高,系统平稳性好,使用寿命长,适应性好,成本低。
按照上文遗传算法策略,种群规模设置为m=50,最大迭代次数200,pc=0.85,pm=0.1为了对比说明遗传算法(GA)的优点,本文对比了神经网络算法(BP)、粒子群算法(PSO)等常见智能算法,其结果如图3所示。
从上图可以看出三种方法都可以达到自己最优的方案,但是遗传算法最具有优势,首先遗传算法收敛速度比较快,在第10代左右就收敛于较高水平,再次验证了遗传算法的收敛性和局部寻优能力;其次从最终收敛的结果来看,遗传算法、神经网络算法和粒子群算法最终收敛值分别为0.8、0.75、0.72,该数据表明通过遗传算法辨识之后的模型寻优能力更加突出。
6结论
利用遗传算法的快速收敛性和全局寻优能力对机械传动方案进行建模和辨识,采用多目标物元方法,对建立的模型进行求解,最后通过Matlab进行仿真,仿真结果证明了该数据的有效性和先进性,改变了传统机械传动建模比较困难的问题,同时本文所提出的建模方法和关联度计算理论将模型描述的定性问题转化为定量问题,从而进行定量分析和计算机计算,为后期的实现计算机的动态模拟奠定基础。
猜你喜欢
纺织科学研究(2021年9期)2021-10-14
湖北农机化(2020年9期)2020-01-08
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
石油地球物理勘探(2017年2期)2017-11-23
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
时代农机(2016年3期)2016-09-06
现代工业经济和信息化(2016年7期)2016-05-17
智能系统学报(2015年4期)2015-12-27
江苏高职教育(2014年4期)2014-02-28
