交叉口绿闪信号行人过街行为模型*
2018-04-08 03:25周竹萍徐永能蔡逸飞
交通信息与安全 2018年1期
周 泱 周竹萍 徐永能 蔡逸飞
(南京理工大学自动化学院 南京 210094)
0 引 言
在我国现行的城市信号控制交叉口,行人相位时间后期的绿闪信号(pedestrian flashing green,PFG)作为行人清空信号,提醒人行横道上的行人在有限时间内迅速完成过街。绿闪信号是保障行人过街安全的重要设计参数,以保证在持续绿灯时间最后一个进入人行横道的行人能舒适地通过交叉口为标准[1]。然而,大多数的城市主干道交叉口人行横道较宽,且缺少2次过街设施,常出现以下现象:在持续绿灯末期进入人行横道的行人,在绿闪期间尚未完成过街,冲突相位机动车已获得绿灯信号开始起动,此时的行人被迫等待穿越机动车空档或强行穿越,造成人车冲突。因此,为提高行人过街安全,研究绿闪信号后的行人过街行为是有必要的。
国外学者关于绿闪信号后的行人过街研究已取得了较多成果。JHatfield 等[2]的调查报告指出:超过半数的机动车驾驶人认为绿闪起动后的过街行人不再拥有优先通行权,这意味着绿闪期间的过街行人有较大可能陷入人车冲突的困境。M. J. King[3]等在研究城市交叉口不安全过街行为中指出,行人在绿闪信号期间的过街相比在持续绿灯时间内过街承受更大的风险。M. Iryo-Asano[4]等建立了行人过街行为选择模型和过街速度分布模型,对等待区的过街行人在绿闪信号后的过街过程展开研究,得到绿闪后不同规模人行横道上的行人过街速度分布。E. Nikolaos[5]等通过视频采集,分析了不同性别、年龄的行人在绿闪信号期间与机动车驾驶人发生冲突时的过街行为。国内学者也做过类似研究。张惠玲等[6]使用视频和问卷调查法获得行人过街行为特征,并建立二元Logit模型,预测行人在过渡信号期间的过街行为。高铁军[7]考虑过渡信号期间的零散过街行人易受到转弯车流的影响,建立了改进的过渡信号时长模型,为合理的过渡信号时长设置提供了参考。
相比国外对绿闪信号后行人过街机理研究的重视,国内关于绿闪信号后的行人过街行为研究甚少。而且,现有研究集中于绿闪后等待区行人的过街行为选择,缺少对绿闪后人行横道上的行人过街行为研究。行人运动模型是研究行人行为最好的工具。总结过往研究,运用社会力模型[8-11]与元胞自动机[12]构建行人流运动模型是当前最精确并被学界广泛认可的方法。对于人行横道等步行设施,行人在此空间中是连续运动,而社会力模型作为连续模型,从模型划分空间方式上看,在每一时刻的行人速度、位置等都可以在设施平面坐标系中确认;另外,社会力模型作为微观模型能自发地生成宏观上的自组织现象。因此,笔者选取社会力模型作为建模方法,重点研究绿闪开始后人行横道上的行人过街行为机理,目的在于建立一套描述绿闪信号后行人过街行为的模型,并通过实例验证模型的合理性和有效性。
1 行人过街模型
假设行人的运动及行人与周围环境之间的相互作用均发生在水平面上,以Helbing等[8]提出的经典社会力模型为基础框架,绿闪信号起动后的行人α应受到4种力,分别为自驱动力FS、来自人行横道边界的力FB、来自周围行人的力FP及来自右转车辆的力FV。行人过街运动看作是合力作用的结果,合力与速度表达式分别为
F(t)=FS+FB+FP+FV
(1)
vα(t)=vα(t-1)+F(t)·Δt
(2)
1.1 自驱动力

(3)
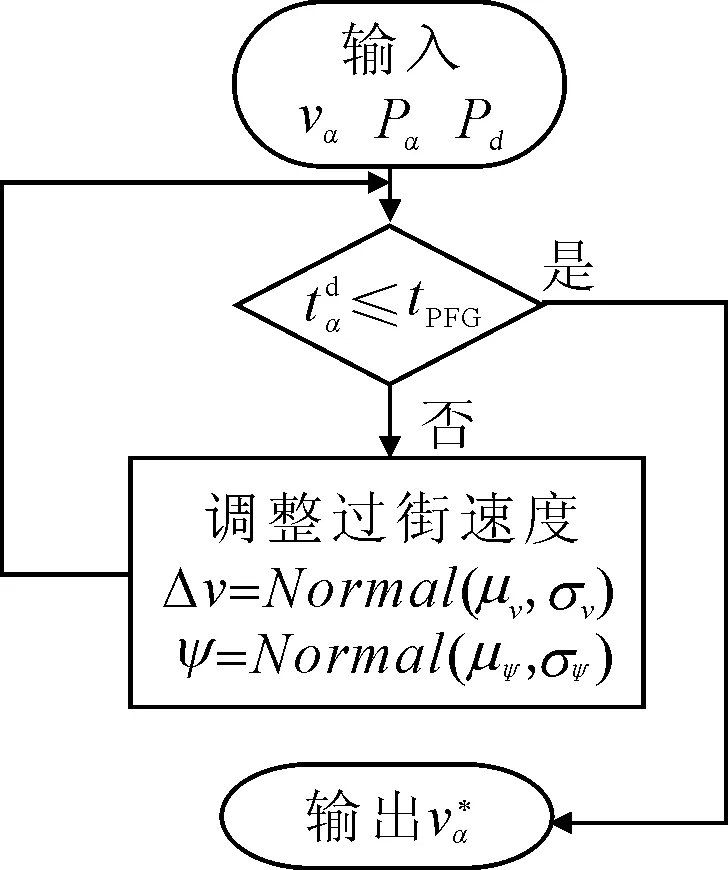
图1 过街方案Fig.1 Flow chart of crossing maneuver

(4)
(5)
(6)
式中:τ为适应时间。
1.2 来自人行横道边界的力
行人过街受到来自人行横道宽度的范围约束,这种约束可以用社会力来表征,力的大小与行人当前位置和最近边界位置之间的距离有关,力的方向在2点的连线上。当行人α在人行横道内行走,将受到来自距离其最近的人行横道边界的排斥力,排斥力作用是将α约束在人行横道内;当α为了避免与冲突车辆或行人碰撞而走到人行横道外,此时与α距离最近的人行横道边界对其产生吸引力,使α重新回到人行横道内。α受到来自人行横道边界的力FB的表达式为
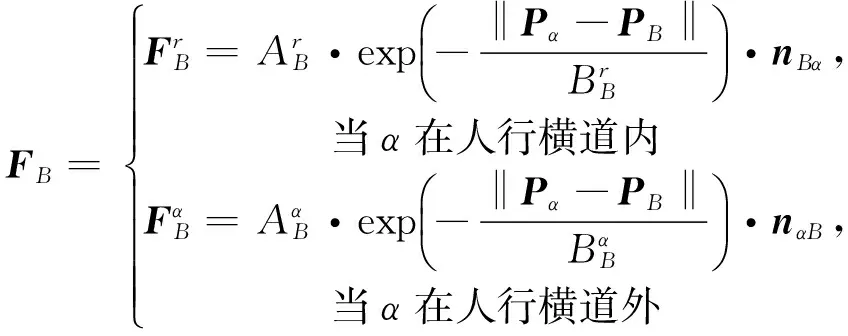
(7)
1.3 来自周围行人的力
行人过街行为建模需要结合行人间避碰模式的随机性,建立行人避让模型[14]。绿闪时间内人行横道上的行人流量较小,行人行走空间较大,选取ES2(elliptical specication Ⅱ)社会力模型来描述小流量行人之间的避碰行为[15]。即过街行人α与其正前方视觉区域[16](视角170°,视觉半径6m)距离最近行人β之间的避碰,该行为视作α受到β的排斥力作用。行人β将产生具有椭圆形等势线的力场,排斥力的力势是椭圆短半轴长度bαβ的指数递减函数,β对α排斥力的方向是以α为切点的椭圆的外法线方向。α受到来自最近行人β的排斥力表达式为
(8)
(9)
式中:nαβ为行人β对α排斥力的方向;dαβ=Pα-Pβ,yαβ=dαβ-(vβ-vα)Δt;bαβ为β产生的椭圆势场的短半轴长度;Aβ,Bβ分别为强度系数与作用范围系数。
1.4 来自右转车辆的力
行人过街效率的另一个重要影响因素由右转车辆造成的人车冲突[17]。现场调研后发现,在人行横道冲突区域,机动车和行人存在相互避让行为,两者具有近乎平等的通行权。在持续绿灯时间内,过街行人相对集中形成过街群体,转弯车辆几乎没有可穿越的空档,只能在冲突区域前减速等待。而绿闪期间的行人流量相对较小,转弯车辆容易获得可穿越空档,此时的行人过街就会受到相对较大的转弯车流干扰。与行人间的躲避类似,右转车辆的干扰可视作车辆对行人产生排斥力。考虑右转车辆的速度影响,椭圆力场的焦点应分别为车辆的近侧后轮位置与下一时刻车辆的近侧前轮位置。行人α受到来自右转车辆的排斥力表达式如下。
(11)
(12)
2 模型验证
笔者验证模型的思路是通过视频采集与分析技术得到实际情境下的行人过街行为特征,同时将模型通过Java语句在仿真平台上进行仿真,验证仿真结果能否产生与行人过街实际相符的宏观特性,微观上能实现吸引与避碰等行人行为。
2.1 参数标定
为进行模型仿真验证,首先需要标定模型参数。选取南京市太平北路—长江路交叉口东进口人行横道作为调查地点,该人行横道连接总统府景点与大行宫地铁站5号出口,人流量相对较大,行人设施利用率高,调查时间为2017年2月18日09:00—10:00,17:00—18:00,通过视频拍摄 2 h内共计80组绿灯信号内的行人过街过程,调查获取基础数据见表1。
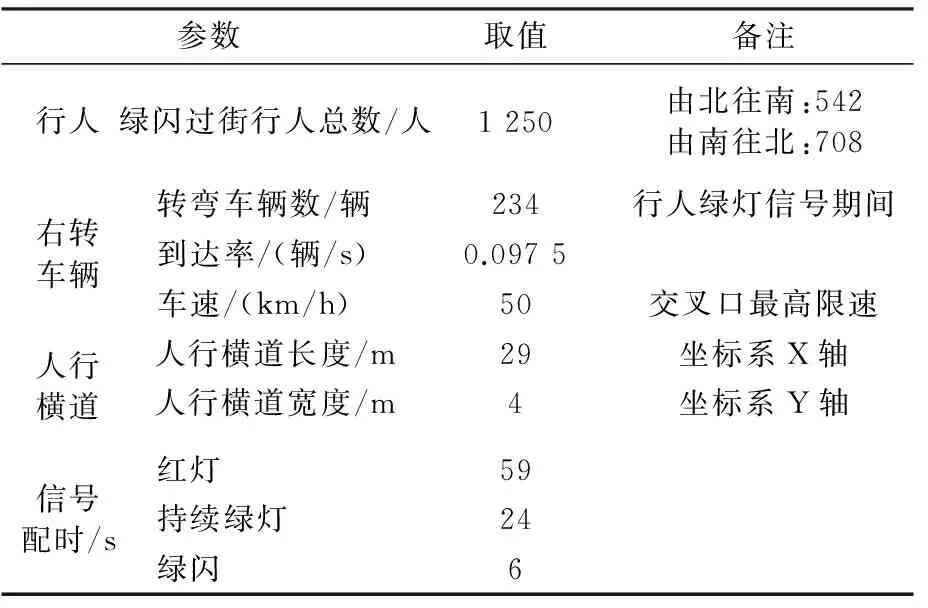
表1 人行横道调查数据Tab.1 Survey data of the crosswalk


(13)
vα=3.047-2.197exp(-t/1.595)
(14)
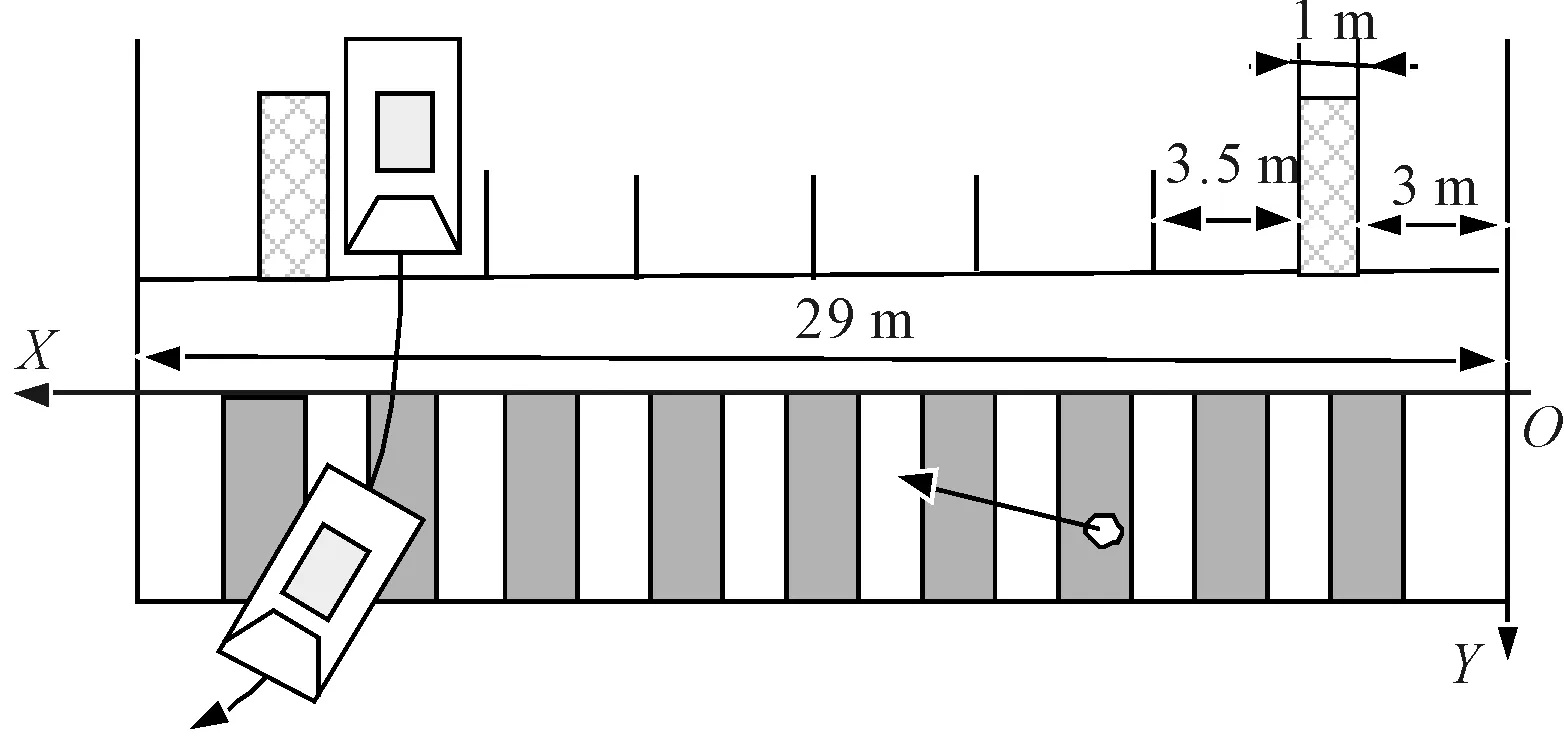
图2 调查地点示意Fig.2 Crosswalk setting of the study sites
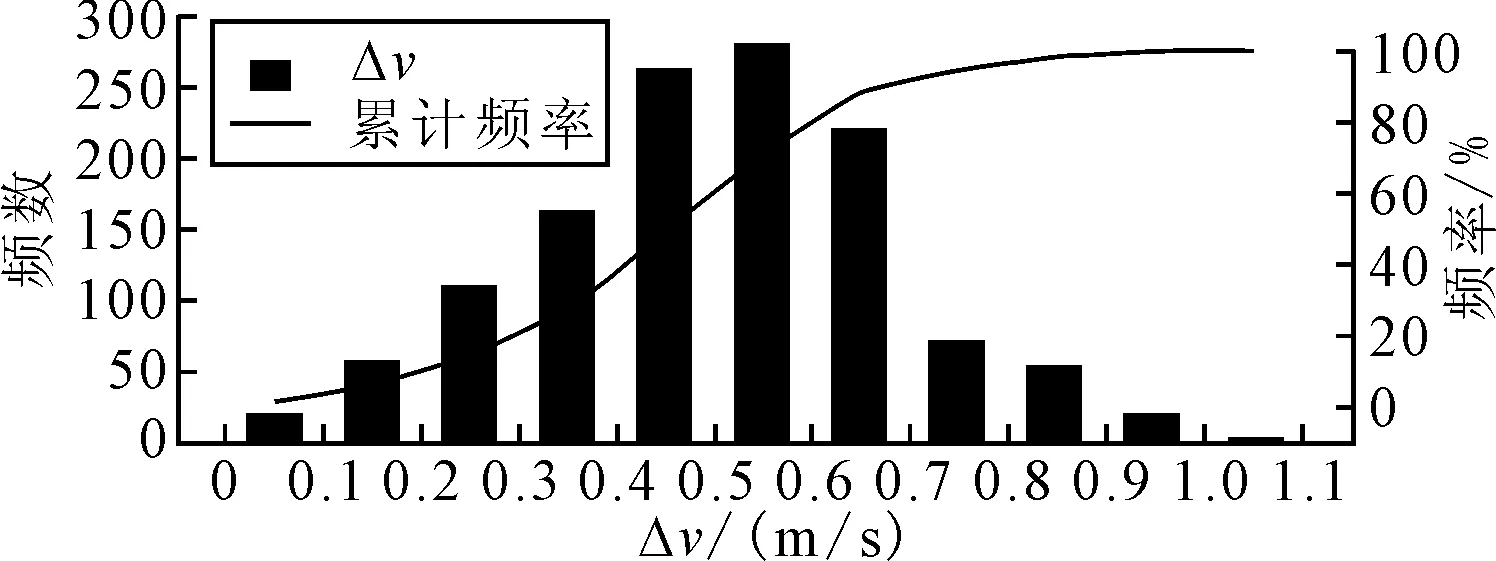
图3 绿闪后1 s行人速度变化分布Fig.3 Distribution of the pedestrian speed change during the first second of PFG
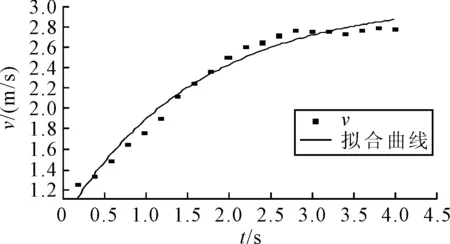
图4 一个行人的加速过程Fig.4 Acceleration process of a pedestrian
2.2 模型仿真
绘制太平北路—长江路交叉口东进口人行横道底图并导入,同时使用行人库与车辆库,设置表1中绿闪期间的行人参数与车辆到达率,然后通过Java语言编程建立行人过街模型,输入仿真平台。为研究绿闪信号后位于人行横道不同断面的行人过街速度规律,将人行横道分成4个区段,由调查得到的绿闪期间每个区段上的平均行人数量作为行人到达率输入,最终生成仿真环境。程序运行一段时间后稳定,仿真示意如图5。
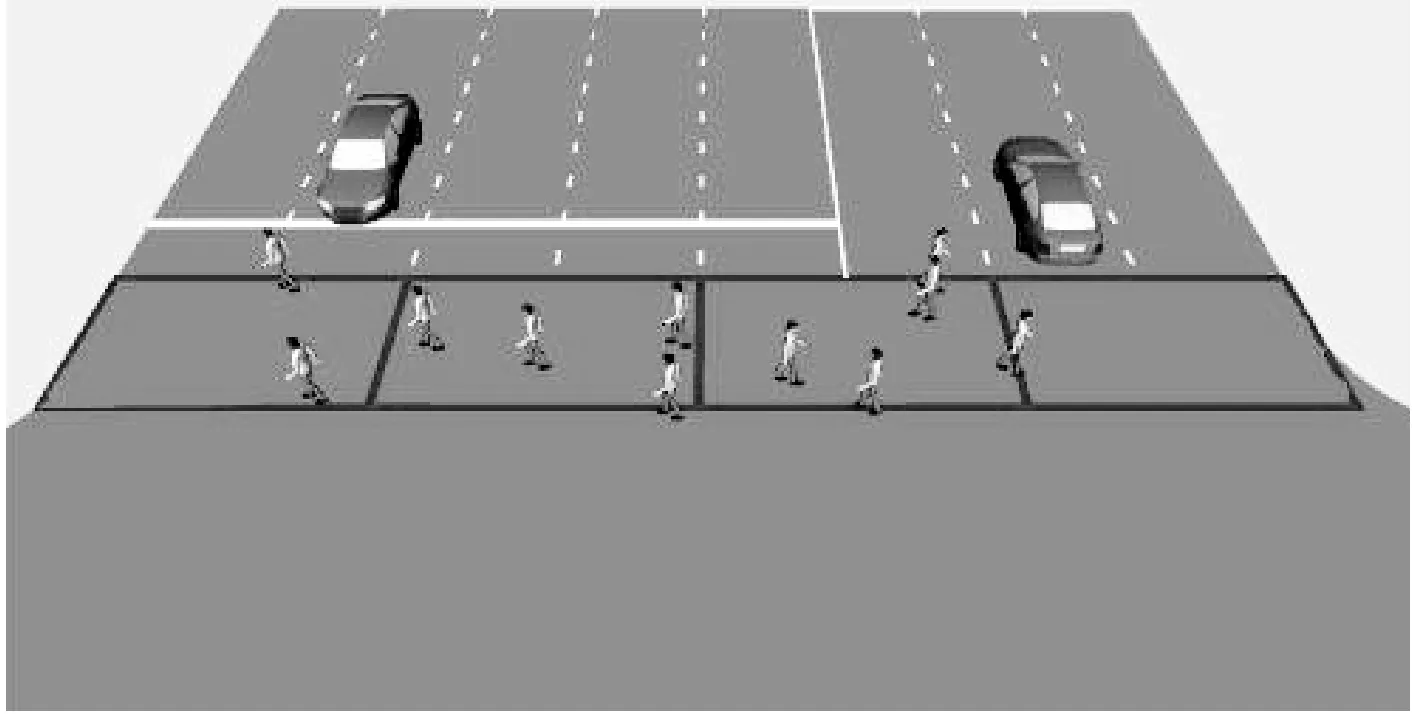
图5 仿真示意Fig.5 Figures of simulation
2.2.1行人分布形态验证
人行横道上的行人过街是典型的双向行人流交织场景,通过仿真截图6 a)可以清楚地观察到对向行人运动时出现的分层自组织现象。由南往北的过街行人与由北往南的过街行人在过街时自动形成各自的“通道”,并主动跟随前方同向行人在此“通道”上行进,从而双向行人之间形成“层次”。通过仿真可知行人交织时形成的层次与行人流量以及行人的期望离开方向等因素有关。
图6 b)展示了行人之间的排斥力作用,当由南往北的过街行人与其身边由北往南的过街行人距离不断靠近时,双方同时反应,相互避让。图中显示过街行人双方都向其自身右方偏移,可理解为:行人与对向行人间的避碰,偏移选择的方向与其同向行人流所形成的“通道”方向一致,是行人为提高过街效率的体现。图6 c)展示了来自人行横道的吸引力作用,由南往北的过街行人为了避免与身边过街行人发生碰撞,走出了人行横道范围,当冲突行人通过了冲突范围,便立即回到人行横道内行走。图6 d)展示了来自右转车辆的排斥力作用,绿闪信号内的行人流量少且分布较散,转弯车辆易获得穿越间隙,当车辆开始穿越冲突区域时,冲突的过街行人开始减速,等待车辆通过。上述现象都验证了模型在宏观层面上吸引与排斥作用的有效性。
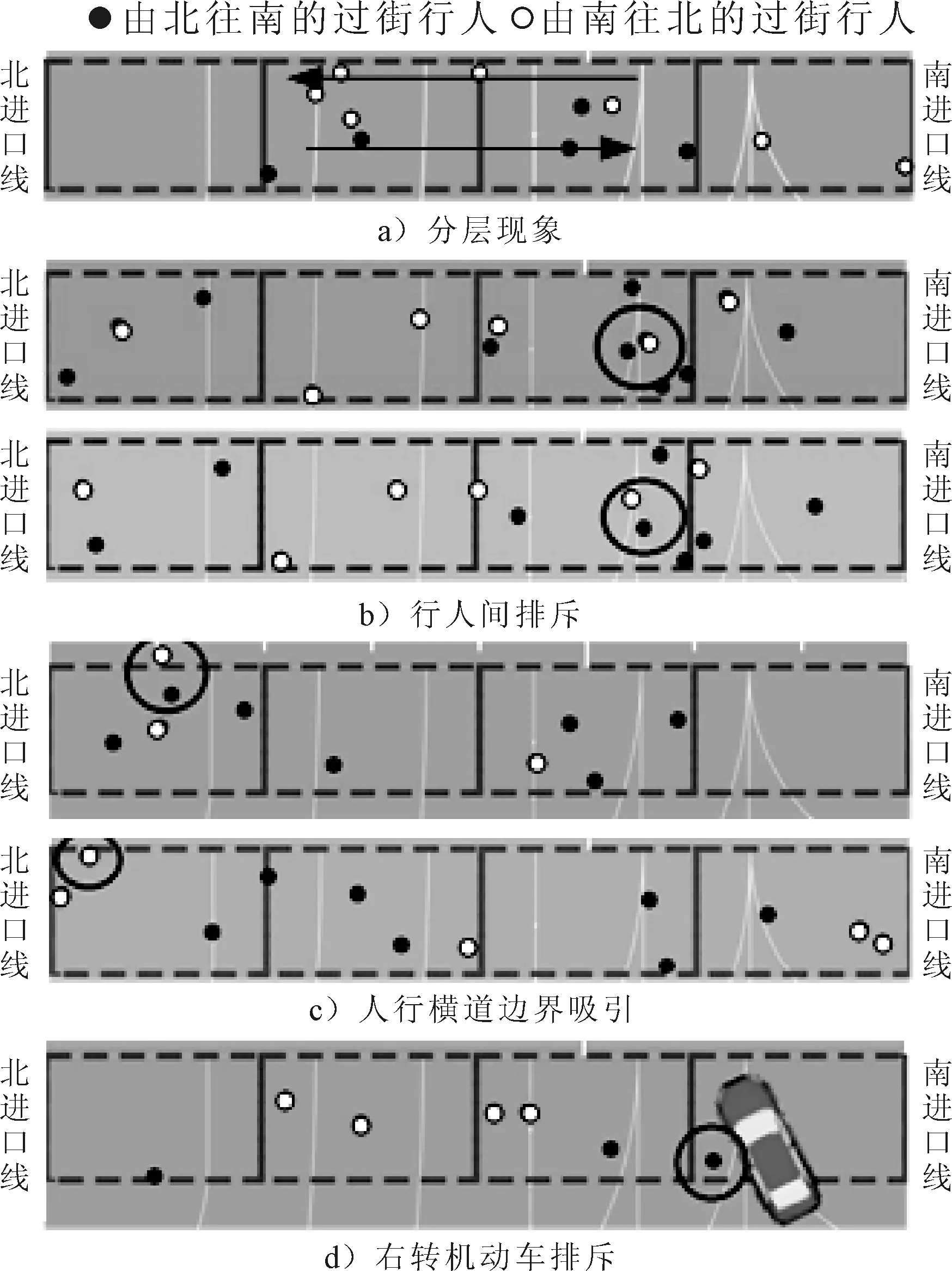
图6 仿真截图Fig.6 Screenshots of simulation
2.2.2速度时间分布验证
为研究绿闪后不同断面位置行人的过街速度变化,以由南往北过街的行人为例,分别取绿闪开始时刻位于断面x=4, 11.5, 18.5,25 m的行人为研究对象,得出实际过街行人与仿真行人的速度变化曲线,见图7。
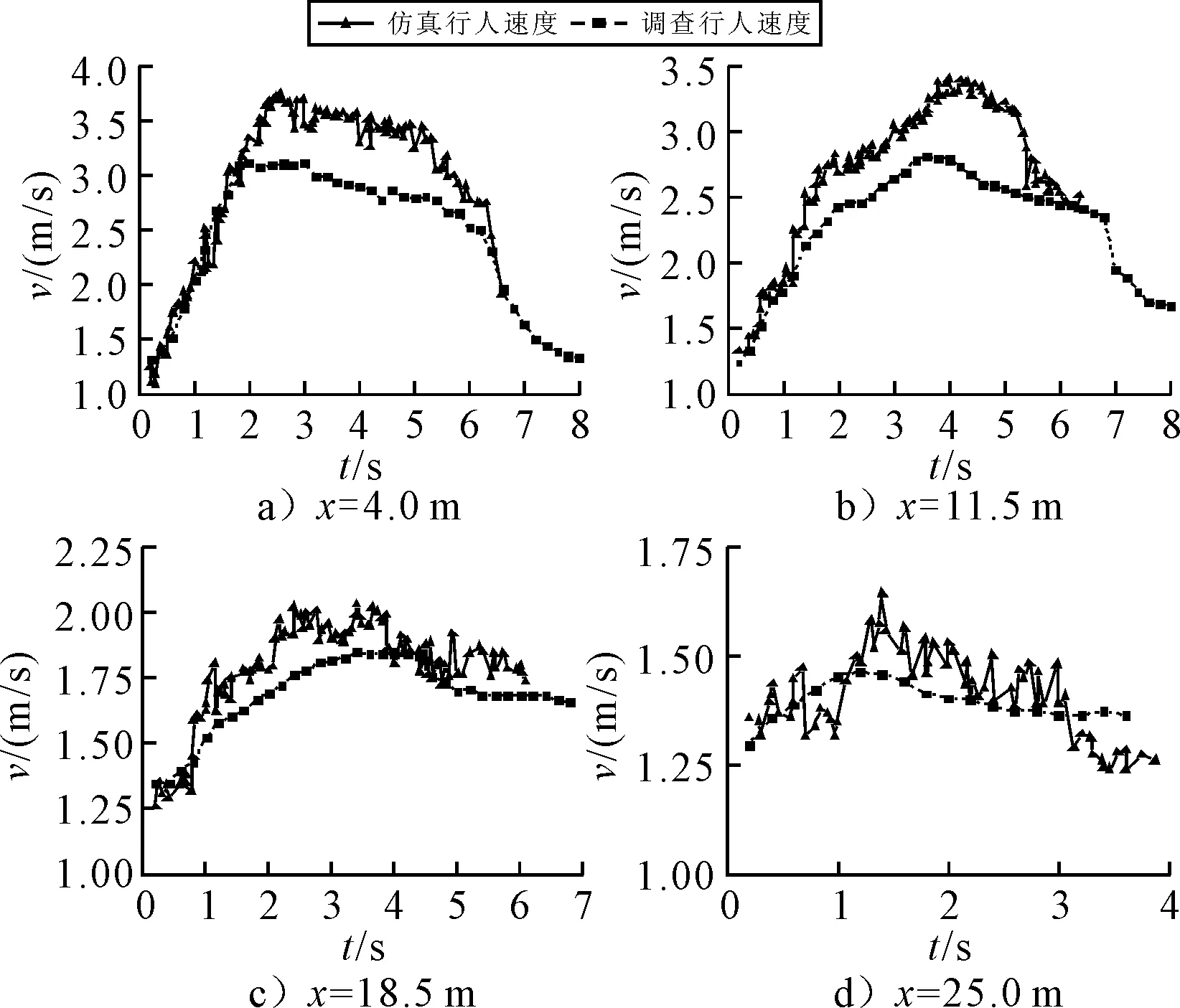
图7 行人过街速度变化Fig.7 Speed change of pedestrian
由图7 a)~b)可见,人行横道前半段的行人在接收到绿闪信号后开始明显加速,加速时间短且加速度较大。仿真行人与实际过街行人有着非常接近的加速过程,不同的是仿真行人为了在6 s的绿闪时间内完成过街,对自身施加较大的自驱动力,生成了比实际过街行人更大的过街速度(最大达到4 m/s),而实际过街行人在绿闪后更倾向于以一个稳定且较快的步速过街。其次,图中曲线可以看出,实际过街行人在6 s内并未完成过街过程,但行人在第6.5 s左右速率有明显下降,说明行人到达了与右转机动车冲突区域,为避让机动车而减速,而行人在此后的过街安全不会再受到机动车的威胁。因此,可以认为人行横道前半段的行人在绿闪起动后将立即加速至一个较快的速度并稳速行进,且提速的动机在于在绿闪结束时刻到达与右转机动车的冲突区域,而非人行横道出口线。
如图7 c)~d)所示,人行横道后半段的行人在绿闪后也有一段加速过程,速度变化幅度相比前半段的行人相对平缓,并且可以认为:距离人行横道出口线越远的行人,加速的时间越长。仿真和视频调查结果相同,绿闪开始时刻位于人行横道后半段的行人,均可以在绿闪时长内完成安全过街。
为说明仿真效果,对在相同参数个数条件下的曲线拟合度指标RNL、夹角余弦系数FR,以及残差平方和Q进行计算,结果如表2所示。指标FR相当于放大镜,4个断面的行人过街速度曲线拟合FR值均在0.9以上。然后选用灵敏度和分辨率非常高的指标RNL(显微镜)检验,模型对人行横道前、后半段过街行人模拟精度分别为83%,95%,可见模型对于人行横道后半段行人的仿真效果更好,这是由于绿闪起动时位于人行横道前半段的行人剩余过街距离相对较长,容易受客观不确定环境因素与主观意识影响。另外,笔者于2017年6月1日再次对交叉口过街数据进行调研,重新进行模型标定与验证工作,得到结果基本一致。总的来说,从曲线拟合度指标结果,可以认为模型能较好地拟合实际过街数据。
(15)
(16)
(17)
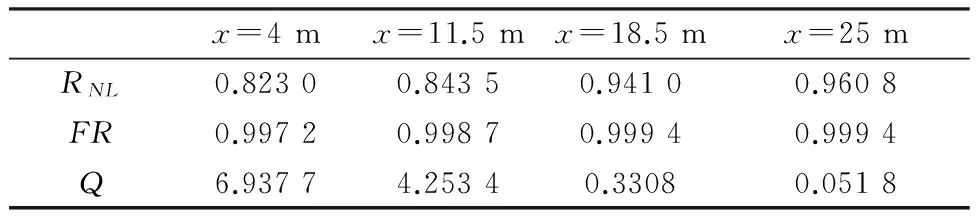
表2 拟合优度指标结果Tab.2 Results of the fitting optimization indexes
3 结束语
1) 模型在宏观上能产生与实际行人过街场景相符的分层自组织现象,也能实现行人与周围行人、冲突车辆的避碰以及行人受到人行横道范围约束等行为。
2) 通过RNL,FR等拟合优度指标结果,说明了模型能较好地仿真实际过街行人的行人速率变化,在微观上是可信的。
3) 绿闪起动时刻位于人行横道前半段的过街行人加速时间短、加速度大,当达到较大速度后以该速度稳定行进,并争取在绿闪结束时刻到达人行横道后半段人车冲突区域,以保证过街安全。
4) 绿闪起动时刻位于人行横道后半段的过街行人也有一段加速过程,且距离人行横道出口线越远的行人,加速的时间越长,但总体加速度不大,基本上都能使行人在绿闪时间内能完成过街。
尽管仿真验证了模型在宏观与微观层面上的有效性,但由于行人作为有意识的个体,模型始终无法精确模拟行人运动,只能尽可能寻求较准确的方法对行人过街行为进行建模。同时,本文也存在一些不足之处,如模型在建立时忽略了非机动车对行人过街的影响,没有考虑天气、路况、交叉口机动车限速等影响因素。在以后的研究中,将进一步完善模型,并通过调查不同绿闪配时的行人过街,基于模型仿真,为合理的绿闪时长设置提供依据。
参考文献References
[1]陈 鹏.城市交叉口行人过街信号清空时间设置研究[J].公路与汽运,2011(6):65-68.
CHENG Peng. Study on the clearance time of pedestrian crossing at urban intersections[J]. Highways & Automotive Applications, 2011(6):65-68.(in Chinese)
[2]HATFIELD J, FERNANDES R, JOB R F, et al. Misunderstanding of right-of-way rules at various pedestrian crossing types: Observational study and survey[J]. Accident Analysis & Prevention. 2007,39(4):833-842.
[3]KING M J, SOOLE D, GHAFOURIAN A. Illegal pedestrian crossing at signalized intersections: Incidence and relative risk[J]. Accident Analysis & Prevention, 2009,41(3):485-490.
[4]IRYO-ASANO M, ALHAJYASEEN W K M, NAKAMURA H. Analysis and modeling of pedestrian crossing behavior during the pedestrian flashing green interval[J]. IEEE Transactions on Intelligent Transportation Systems, 2015,16(2):958-969.
[5]NIKOLAOS E, ATHANASIOS G. Pedestrians and drivers behavior in street crossing with flashing green beacon[C]. European Transport Conference 2009, Noordwijkerhout, Netherlands: AET, 2009.
[6]张惠玲,王 益,敖谷昌.信号交叉口过渡信号期间行人过街选择行为分析[J].交通运输系统工程与信息,2015,15(2):232-237.
ZHANG Huiling, WANG Yi, AO Guchang[J]. Journal of transportation systems engineering and information technology, 2015,15(2):232-237.(in Chinese)
[7]高铁军.城市信控交叉口的过渡信号研究[D].北京:北京交通大学,2008.
GAO Tiejun. Study on the transition signal of signal controlled intersections in cities[D]. Beijing: Beijing Jiaotong University, 2008.(in Chinese)
[8]HELBING D, MOLNAR P. Social force model for pedestrian dynamics[J]. Physical review E, 1995,51(5):4282-4286.
[9]HELBING D, FARKAS I, VICSEK T. Simulating dynamical features of escape panic[J]. Nature, 2000,407(6803):487-490.
[10]ZANLUNGO F, IKEDA T, KANDA T. Social force model with explicit collision prediction [J]. Europhysic letters, 2011,93(6):68005.
[11]李慧颖,梁启宇,万 千,等.基于行人过街场景的社会力模型改进研究[J].交通信息与安全,2015,33(1):29-34.
LI Huiyin, LIANG Qiyu, WAN Qian, et al. The study of modified social force model based on pedestrian crossing[J]. Journal of Transport Information and Safety, 2015,33(1):29-34.(in Chinese)
[12]任 刚,陆丽丽,王 炜.基于元胞自动机和复杂网络理论的双向行人流建模[J].物理学报,2012,61(14):1-10.
REN Gang, LU Lili, WANG Wei. Modeling the pedestrian counter flow based on cellular automata and complex network theory[J]. Acta Physica Sinica, 2012,61(14):1-10.(in Chinese)
[13]FANG Z, YANG J P, WANG Y C, et al. Survey of pedestrian movement and development of a crowd dynamics model[J].Fire Safety Journal.2008,43(6):459-465.
[14]ZHOU Zuiping, CAI Yifei, KE Ruimin, et al. A collision avoidance model for two-pedestrian groups Considering random avoidance patterns[J]. Physica A, 2017,425:142-154.
[15]JOHANSSON A, HELBING D, SHUKLA P K. Specification of the social force pedestrian model by evolutionary adjustment to video tracking data[J]. Physics,2008,10(2):271-288.
[16]杨 蕊.城轨通道行人超越与对向避让模型研究[D].北京:北京交通大学,2014.
YANG Rui. The research of pedestrian overtaking and avoiding model in urban rail channel[D]. Beijing: Beijing Jiaotong University, 2014.(in Chinese)
[17]鲍怡婷,周竹萍,徐永能.信号交叉口右转机动车与行人冲突运动模型[J].交通信息与安全,2016,34(3):41-49.
BAO Yiting, ZHOU Zhuping, XU Yongneng. A conflict model involving right-turning vehicles and cross-walking pedestrians at signalized intersections[J]. Journal of Transport Information and Safety, 2016,34(3):41-49.(in Chinese)
[18]ZENG Weiliang, CHEN Peng, NAKAMURA H, et al. Application of social force model to pedestrian behavior analysis at signalized crosswalk[J]. Transportation Research Part C: Emerging Technologies, 2014,40(1):143-159.
[19]MOUSSAÏD M, HELBING D, GARNIER S, et al. Experimental study of the behavioral mechanisms underlying self-organization in human crowds[J]. Proceedings of the Royal Society: Biological sciences, 2009,276(1668):2755-2762.
猜你喜欢
现代青年·精英版(2022年3期)2022-04-06
建材发展导向(2021年19期)2021-12-06
新传奇(2021年32期)2021-09-22
中国人民公安大学学报(自然科学版)(2020年4期)2021-01-07
中国人民公安大学学报(自然科学版)(2018年2期)2018-01-14
中国房地产业(2016年2期)2016-03-01
汽车文摘(2015年11期)2015-12-02
小天使·四年级语数英综合(2015年4期)2015-04-20
系统工程学报(2015年3期)2015-02-28
郑州大学学报(工学版)(2014年6期)2014-03-01