
改进粒子滤波的锂电池SOC估算
2018-04-11 03:41樊翠玲
实验室研究与探索 2018年1期
樊翠玲
(驻马店职业技术学院, 河南 驻马店 463000)
0 引 言
锂电汽车行驶距离很大程度上由锂电池决定,精确对锂电池荷电状态(State of Chavge, SOC)估算是动力电池延长使用寿命重要参数之一,由于锂离子电池内部结构复杂,同时受到电流、温度等多个因素的影响,使得SOC精确计算比较困难[1]。
目前基于电池外特性参数测量常用的方法有:放电实验法是最为直接和可靠的电池剩余电量估计方法[2],该方法简单、准确,但是实际应用中此方法只能离线工作,而且造成能量浪费;开路电压法测试精确、使用简单[3],但是需要电池静置较长时间才能进行估算,不适用于在线估算;安时积分法能够在短的时间内,精确地估算出结果[4],但是由于在开环估算条件下SOC的初始值无法确定,导致出现误差累计;内阻法通过电池固有的直流内阻和交流内阻之间的关系进行估算[5],但是很难测量内阻;线性模型法根据SOC变化量、电流、电压和上一个时间点SOC值计算[6],只适用于小电流、SOC缓变的情况;基于电池模型的智能算法主要有:神经网络算法通过对采集的大量数据进行估算[7],因此精确度比较高,但是如果采集的数据量少,影响估算结果;卡尔曼滤波法利用电压电流递算出SOC的最小方差估计[8],但是对不同的模型计算结果不一样,同时对计算机运行速度要求高;模糊逻辑算法模拟人类模糊思维,最终实现SOC的估计,该方法需要充分了解电池自身特性,同时也需要超大的运算量支持。
为了提高锂电池SOC估算的精度,本文采用改进粒子滤波算法。在Thevenin模型的基础上考虑了电流漂移和温度对SOC估算的影响,使得模型更加精确,通过递推最小二乘法对模型参数求解;利用无迹卡尔曼滤波(Unscented Kalman Filte, UKF)算法重要性采用更新粒子,再通过粒子权值与设定阈值比对大小,只有权值大的粒子才能够进入复制组被重新采样,小的则被抛弃,在进入复制组的粒子通过线性函数生成新粒子;试验结果表明,该方法提高了SOC估算精度,明显低于采用卡尔曼滤波和粒子滤波算法的SOC估计误差。
1 锂电池模型建立
1.1 Thevenin模形及数学推导
Thevenin模型电路如图1所示[9]。
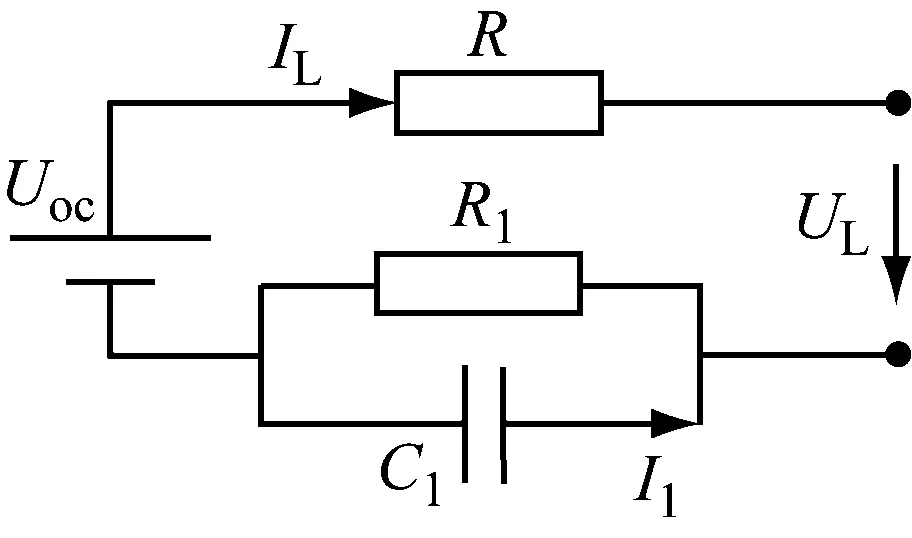
图1Thevenin模型
图中:Uoc为理想电压源,为电池的开路电压,电阻R为电池内阻,电阻R1和电容C1并联分别为极化内阻、电容。复频域电路输出方程是:
(1)
电路阻抗为:
(2)
通过双线性原理得出:
(3)
z域下的电路模型参数表达式:
ZTz=
(4)
令:
(5)

离散化后,时域分析可得:
E(t)=α1IL(t)+α2IL(t-1)+α3E(t-1)
(6)
由于Thevenin通用模型对锂电池电流特性方面表现不足[10],通过电流传感器得到的电流实测值IL可分为实际值Ireal和漂移值Id两部分:
IL=Ireal+Id
(7)
Id是缓慢变化的量,把电流漂移值Id、电池SOC和极化电压Up作为系统的状态变量,得到状态空间方程:
(8)
式中:C为电池额定容量;η为电池影响因子;r为零均值高斯白噪声。
得到观测方程:
E(t)=α1IL(t)-Id(t)+α2(IL(t-1)-
Id(t-1))+α3E(t-1)
(9)
1.2 模型参数求解
通过递推最小二乘法推导得到α1、α2、α3参数[11],推导过程为:
(10)

1.3 影响估算的因素及改进方法
考虑工作温度和充放电电流对SOC估算的影响[12],令电池影响因子为:η=η1η2。式中:η1是温度影响因子;η2是电流影响因子。
利用最小二乘法拟合曲线,得到η1与温度h之间的关系式:
(11)
得到η2与充放电电流IL之间的关系式:
η2=
(12)
由于考虑工作温度和充放电流,校正了锂电池SOC估算模型,减少了计算误差,使得SOC估算更加精确,电池影响因子与工作温度和充放电仿真结果如图2所示。
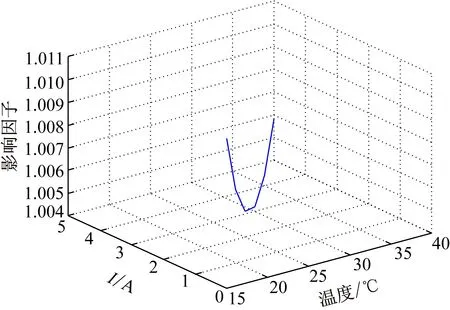
图2 电池影响因子与工作温度和充放电仿真结果
在25 ℃恒温条件下,使用额定电压3.2 V、额定容量为15 Ah的锂电池对本模型α1、α2、α3参数估算结果如图3所示。
2 改进粒子滤波对锂电池SOC估算过程
2.1 基本粒子滤波
粒子滤波算法是一种递推的次优贝叶斯估计算法,可通过蒙特卡罗模拟来实现。它在强非线性情况下的滤波性能指标很高,精度可以逼近最优估计并且使用灵活。但是基本粒子滤波具有退化现象,由于少数粒子被大量复制,从而丧失多样性,在多次迭代之后,差不多所有的粒子都有负的权值,影响了数据处理能力[13-16]。
2.2 改进过程
为了保持粒子的多样性,对基本粒子滤波算法进行改进,通过UKF算法更新粒子,再通过比对权值大小,只有权值大的粒子才能够进入复制组被重新采样,小的则被抛弃。

(a) α1、α2参数估算结果

(b) α3参数估算结果
改进后的算法流程如下:

(13)
(2) 重要性采样。在k时刻(k=1,2,…),对i=0,1,2,…,N执行步骤如下:
① 通过无迹卡尔曼滤波算法更新粒子:
(14)
式中:n为状态向量维数;λ为尺度参数。
② 时间更新:
(15)

③ 量测更新:
(16)
④ 采样粒子:
(17)
计算权重系数:
归一化权值:
(18)
φ=Nthr-Neff/Nthr
(19)
式中:Neff为有效粒子数,Nthr为有效粒子数阈值,Nthr=0.68N。
如果抛弃组粒子数目大于复制组粒子时,循环使用抛弃组粒子。
新粒子通过线性函数生成:
xc=xa+0.4xb
(20)
式中:xc为新粒子,数量为N;xa为进入复制组的粒子;xb为进入抛弃组的粒子。
对新粒子权值重新归一化:
(21)
(4) 计算滤波值:
(22)
(5)k=k+1,得到新的观测值时,返回步骤(2),直至循环结束。
2.3 算法流程
锂电池SOC估算流程如图4所示。
为了充分发挥超级电容功率密度大的优势,设计了一种基于滤波器的模糊逻辑控制器。如图5所示,负载功率的需求先通过低通滤波器的滤波作用,分离出功率需求中的高频负载Pt、低频负载Pr。
具体步骤为:① 设置初始SOC值;② 根据电池模型状态方程计算电池SOC和极化电压;③ 根据电池输出方程计算电池端电压;④ 比较电池真实端电压和模型端电压并计算其误差;⑤ 计算IPF滤波器的增益;⑥ 计算SOC的增益;⑦ 修正电池SOC;⑧ 输出SOC并返回步骤②。

图4估算流程
3 试验及仿真结果分析
选定额定电压3.2 V、额定容量为15 Ah、额定电流为5 A的磷酸铁锂电池为试验对象,使用LEM公司的LT308-S7型电流传感器,为了避免干扰,负载采用纯电阻,在25 ℃条件下进行测试,充电过程采用1/3额定容量(5A),恒流充电,到达3.44 V时静置2 h,采用5 A、10 A放电,到设定截止时间后停止放电,静置2 h后测量电池的开路电压,再继续放电到电池端电压达到3.0 V,分析计算对应开路电压的剩余电量,从而完成测试试验,用Matlab 7.0拟合函数得到开路电压和SOC之间的关系:
Uoc=0.71SOC2+1.16SOC+2.87
(23)
本文模型对电池SOC估算验证,得到的系统预测结果和标准结果的比较如图5所示,其标准结果是通过较精确的放电电流积分得到。
从图5结果可以看出,本文模型结果与试验标准结果的误差能够控制在较小的范围内,最大误差为1.846%,未考虑漂移影响结果以及未考虑温度影响结果与试验标准结果之间的误差较大,会影响对SOC的估算。
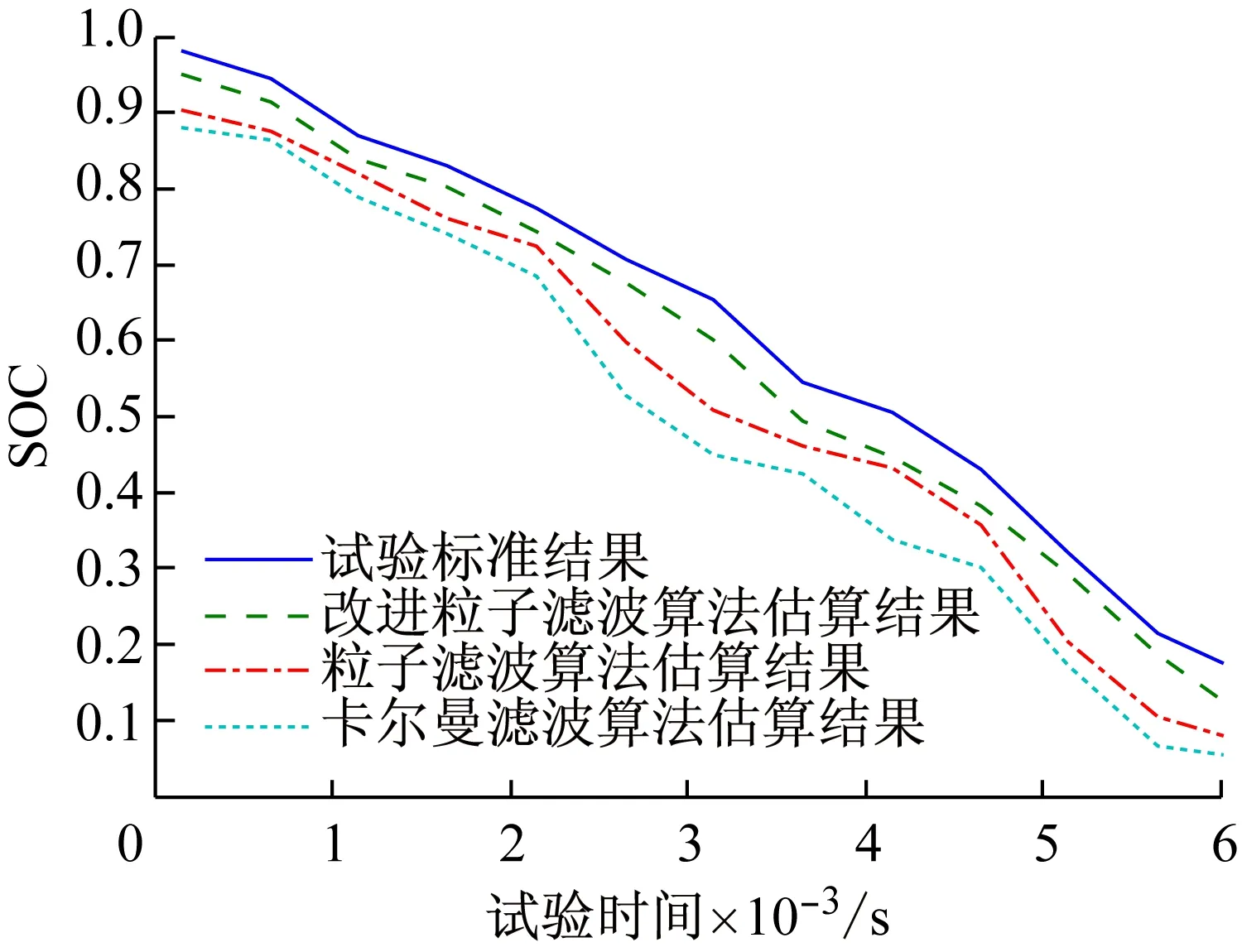
分别采用改进粒子滤波算法、卡尔曼滤波和粒子
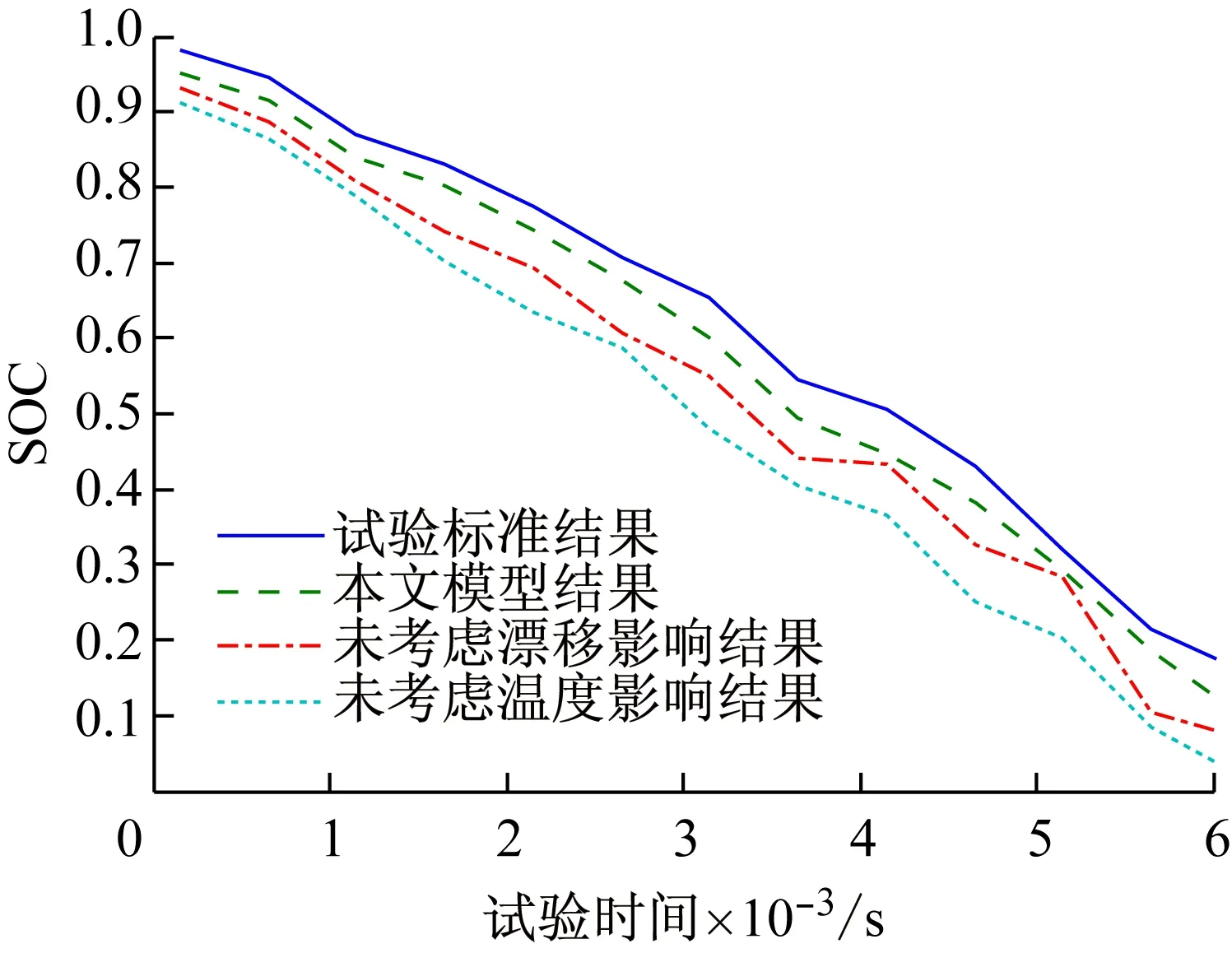
图5 估算验证
滤波算法对锂电池SOC进行估算,对比结果如图6(a)所示,对比估计误差如图6(b)所示。
从图6可以看出,改进粒子滤波算法估算结果比较接近试验标准值,卡尔曼滤波和粒子滤波算法的估算结果远离了试验标准值,这是因为改进粒子滤波算法是利用测量数据在线估计均值和方差,根据每一步均值和方差的估计结果不断修正当前的SOC估算值;同时改进粒子滤波算法能够精确估计SOC,明显低于采用卡尔曼滤波和粒子滤波算法的SOC估计误差。
(a) 估算结果

(b) 估计误差
4 结 语
在Thevenin模型基础上,考虑影响锂电池SOC估计精度的主要因素,试验验证改进粒子滤波算法对锂电池SOC估算的有效性,该算法提高了SOC估算精度,明显低于采用卡尔曼滤波和粒子滤波算法的SOC估计误差,为锂电池SOC估算提供了一种新的方法。
参考文献(References):
[1]骆秀江,张兵,黄细霞,等.基于SVM的锂电池SOC估算[J].电源技术,2016,40(2):287-290.
[2]陈琳,田彬彬,林伟龙,等.影响锂离子电池SOC因素的灰色关联分析[J].电测与仪表,2016,53(13):5-9.
[3]李彬,程为彬,李杰,等.电池的等效模型仿真应用研究[J].蓄电池,2015(2):65-67.
[4]皮钒,王耀南,孟步敏.基于扩展PSO和离散PI观测器的电池SOC估计[J].电子测量与仪器学报,2016,30(1):11-19.
[5]韩忠华,刘珊珊,石刚,等.基于扩展卡尔曼神经网络算法估计电池SOC[J].电子技术应用,2016,42(7):76-78.
[6]于仲安,简俊鹏,刘莹.基于SOC的锂离子电池组均衡控制[J].计算机工程与应用,2016,52(8):261-265.
[7]党选举,汪超,姜辉,等.电源电池电量优化估计仿真研究[J].计算机仿真,2016,33(3):109-114.
[8]欧阳佳佳,毛良平,张军明.基于SOC-OCV曲线的卡尔曼滤波法SOC估计[J].电力电子技术,2016,50(3):98-100.
[9]张东华,马燕,陈思琪,等.锂电池模型参数估计与荷电状态估算研究[J].武汉理工大学学报(信息与管理工程版),2015,37(2):179-182.
[10]于仲安,简俊鹏.基于联合扩展卡尔曼滤波法的锂电池SOC估算[J].电源技术,2016,40(10):1941-1942.
[11]赵又群,周晓凤,刘英杰.基于扩展卡尔曼粒子滤波算法的锂电池SOC估计[J].中国机械工程,2015,26(3):394-397.
[12]孔浩,江明,娄柯.改进的AUKF锂电池SOC估算算法研究[J].南阳理工学院学报,2015,7(6):1-5.
[13]王林,林雪原,孙炜玮,等.改进粒子滤波算法及其在GPS/SINS组合导航中的应用[J].海军航空工程学院学报,2016,26(1):51-57.
[14]张宏伟,李建成,张兵兵.基于安时积分和粒子滤波修正的锂电池SOC估计[J].传感器与微系统,2016,35(10):4-7.
[15]朱志宇.粒子滤波算法及其应用[M].北京:科学出版社,2010.
[16]杨峰,张婉莹. 一种多模型贝努利粒子滤波机动目标跟踪算法[J]. 电子与信息学报, 2017, 39(3): 634-639.
猜你喜欢
北京航空航天大学学报(2017年9期)2017-12-18
电源技术(2016年9期)2016-02-27
百科探秘·航空航天(2015年3期)2015-12-01
海军航空大学学报(2015年1期)2015-11-11
电源技术(2015年1期)2015-08-22
电源技术(2015年7期)2015-08-22
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27
电子设计工程(2014年6期)2014-02-27
