基于UWB的室内停车场高精度定位系统设计
2018-04-11 09:13,,
单片机与嵌入式系统应用 2018年4期
,,
(华中师范大学 物理科学与技术学院,武汉 430079)
引 言
在室内停车场,车速一般被限制在5 km/h以内,即不超过1.39 m/s。所以室内停车场车辆定位系统的定位精度应该达到厘米级别,才能发挥良好的性能。目前,在关于室内停车场车辆定位系统的研究中,绝大部分研究使用的技术为:RFID、蓝牙、WiFi、ZigBee、CSS和图像处理[1-4]等。这些技术存在精度低或实现复杂等问题。然而,超宽带(Ultra Wide Band, UWB)技术利用纳秒至微秒级别的脉冲传输数据,其时间分辨率高,在复杂多径环境中,可以表现出厘米级定位精度。因此,本文将UWB技术运用至室内停车场车辆定位,设计并实现一套UWB定位系统。
由于UWB技术的时间分辨率高,所以它非常适用于基于信号到达时间测距的定位系统[5]。基于到达时间的测距方法分为到达时间(Time Of Arrival, TOA)和到达时间差(Time Difference Of Arrival, TDOA)。其中,TDOA要求所有锚节点之间时间同步,时间同步需要依靠复杂的同步机制或者鲁棒的基础设施来实现,这将导致网络通信协议复杂或者系统成本增大。因此,本文将采用TOA测距方式。然而,每个器件或多或少存在时钟漂移,时钟漂移会给基于TOA的测距结果带来误差。为了减少时钟漂移造成的测距误差,SSA-TWR、 SDS-TWR等多种基于TOA的测距机制被提出[5]。通过研究比较,本文最终选用SDS-TWR测距机制,并使用优化算法计算距离。
在TOA测距的基础上,本文采用约束线性最小二乘算法解算标签位置,该算法在一次最小二乘估计的基础上,利用其结果包含的估计误差对标签位置进行二次估计,从而减小定位结果的误差。最后通过多项实验,测试本系统的定位性能。
1 系统设计
1.1 系统框架
定位系统框架如图1所示。系统包含移动标签、锚节点和位置解算平台三部分。本文研究二维定位(实际上不是二维问题,锚节点位置较高,标签在车上,位置较低, 不在一个平面),标签与锚节点位于同一个二维平面,锚节点M1和M2所在的直线与M2和M3所在的直线垂直。标签主动向M1、M2和M3依次发起测距。锚节点M1充当网关,标签与三个锚节点之间的距离测量值汇集至锚节点M1,由M1通过串口发送至PC端的位置解算平台。
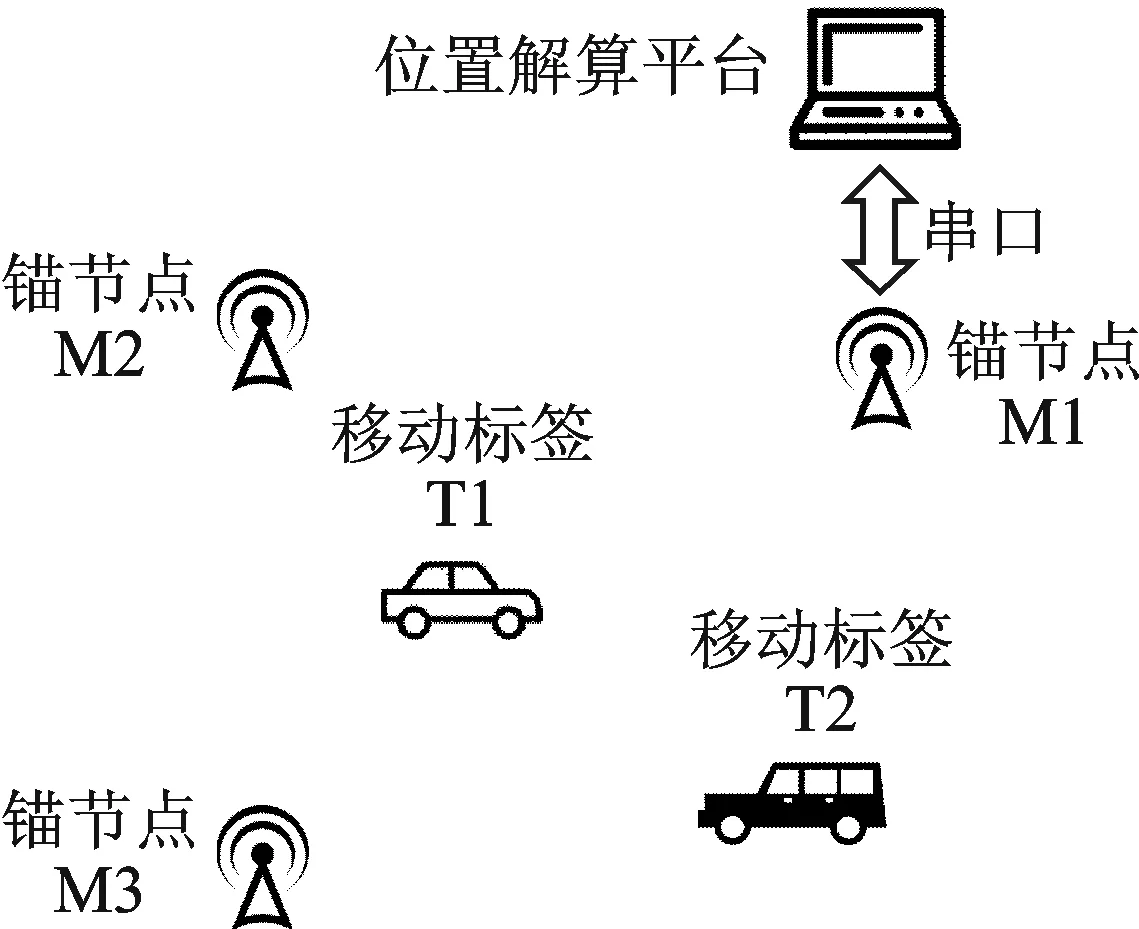
图1 系统框架示意图
1.2 时分复用
系统采用时分复用(TDM)技术实现信道共享。根据信道配置决定的单个标签实现定位所需的最短时长,系统将单个标签的位置刷新周期划分成多个时隙。如图2所示,每个标签被随机分配至特定时隙。网关锚节点M1负责监管和保证每个标签均处于正确的时隙,以免标签之间发生冲突。当网关节点接收到来自标签的请求帧,它将核对来自该标签的请求是否在正确的时隙中被发送。并且,在网关向标签发送的回复帧中包含该标签下次发起定位请求的时间。标签在正确的时隙中依次与锚节点M1、M2和M3进行测距,完成后进入休眠,并在自己的下一个时隙到来时再次被唤醒,与锚节点进行测距。

图2 多标签的TDM信道共享机制
1.3 硬件设计
标签和锚节点的硬件结构框图如图3所示。DW1000是DecaWave公司生产的一款UWB无线收发芯片,支持TOA精确测距和定位,调制方式为BPM加BPSK。主控制器STM32F105通过SPI读写DW1000,实现数据帧的收发和获取数据帧发送或接收的时间戳。标签采用电池供电,锚节点采用USB或者电池供电。锚节点包含串口转USB模块,可将距离测量值通过该模块上传至PC端的位置解算平台。
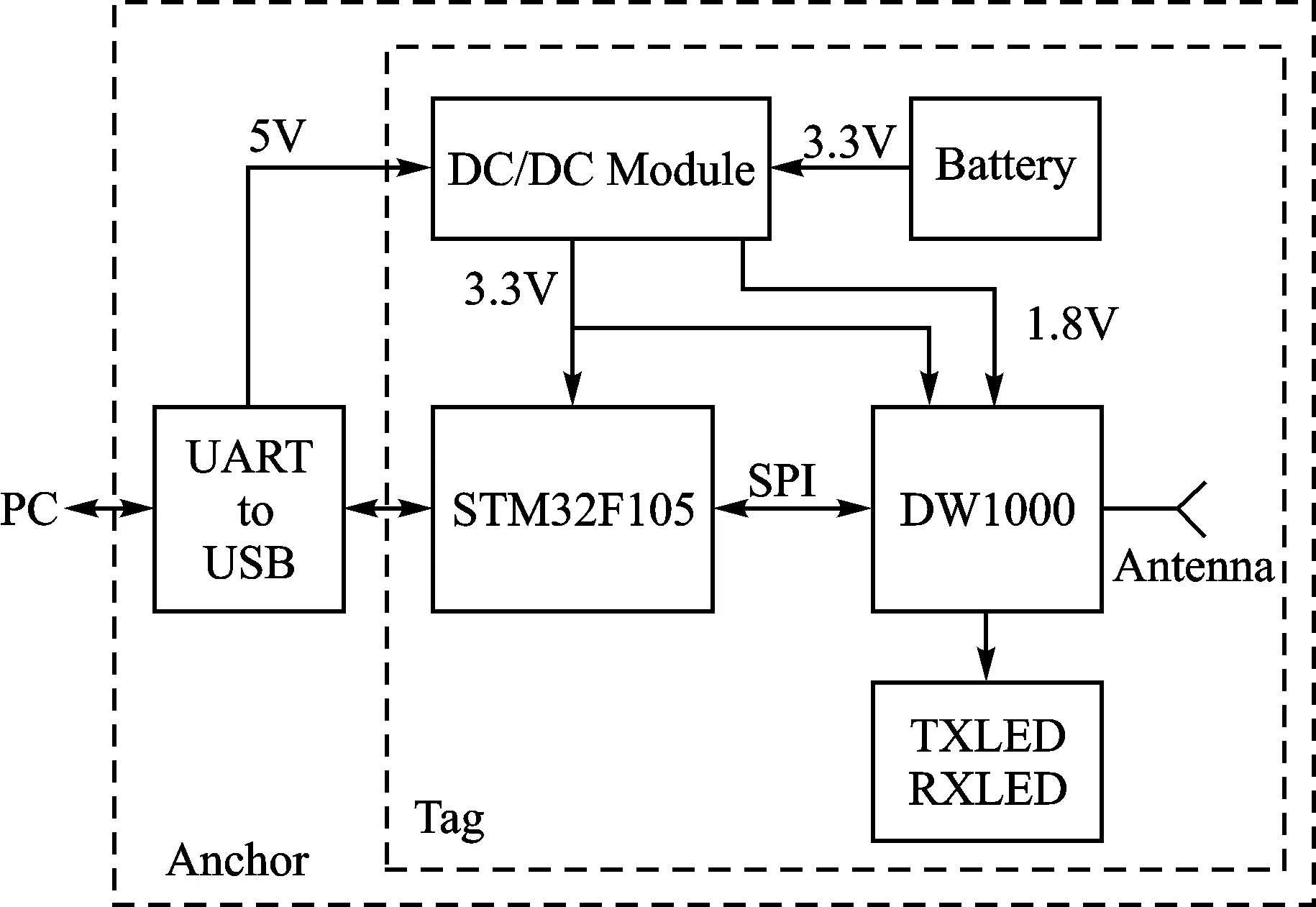
图3 标签和锚节点的硬件框图
1.4 嵌入式程序设计
嵌入式端的程序设计按设备角色分为三部分。如图4所示,标签进入定位网络被分配地址和时隙后开始休眠,只在自己的定位时隙到来时被唤醒,被唤醒后主动向三个锚节点依次发起测距,测距完成后进入休眠状态,等待下一次被唤醒。如图5所示,当锚节点监听到来自标签的测距请求,立即与标签完成测距交互,并在本地计算两者之间的距离值,最后将距离测量值发送至网关节点。如图6所示,网关节点既要与标签节点完成测距,又要将所有锚节点和标签之间的距离信息上传至PC端位置解算平台。
1.5 位置解算平台程序设计
PC端位置解算平台的主程序流程图如图7所示。位置解算平台成功接收来自网关节点的数据帧后,根据协议解析数据帧并存储有用信息,利用定位算法函数解算标签相对于各参考锚节点的位置坐标,并在UI界面上刷新此次定位结果。
2 测距误差来源与抑制措施
本系统采用基于到达时间的测距方法,根据DW1000记录的信号离开或到达射频收发器的时间戳来计算信号飞行时间(Time Of Flight, TOF),信号飞行时间乘以光速得到两节点之间的距离。时钟漂移、频率漂移、接收信号电平和天线延迟均是测距误差的来源。本文主要讨论如何抑制时钟漂移和修正天线延迟对测距结果的影响,从而减小测距误差。
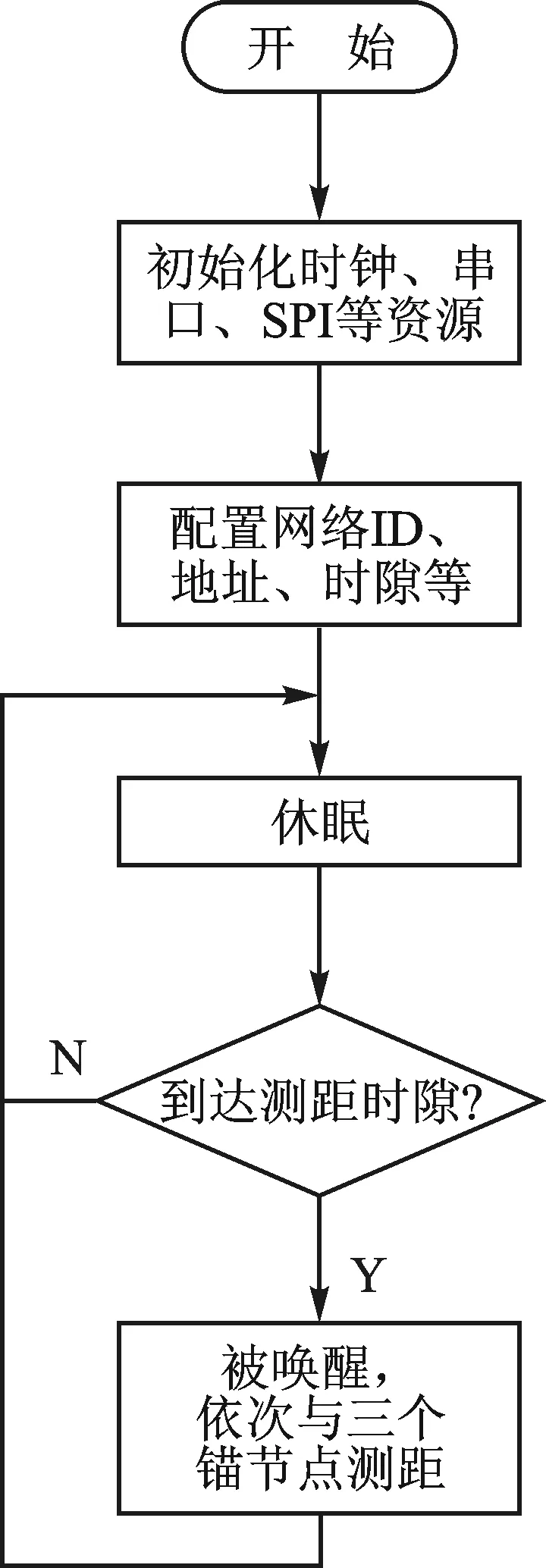
图4 标签节点程序流程图
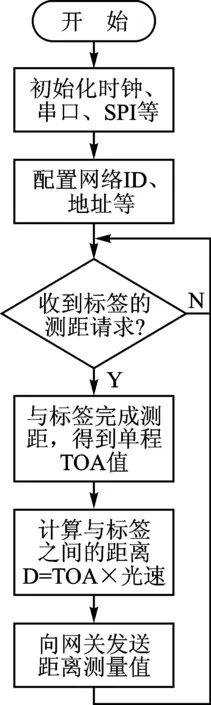
图5 锚节点程序流程图
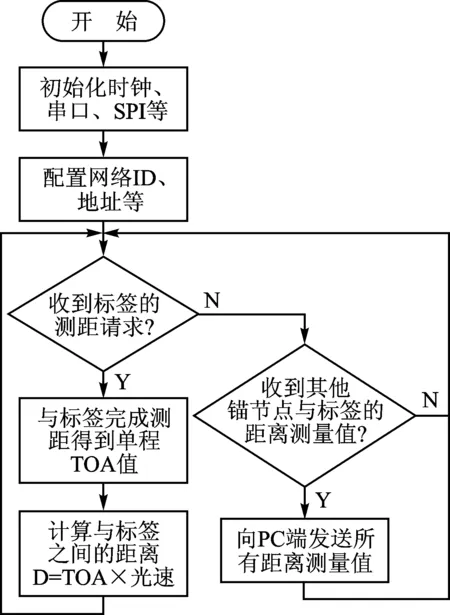
图6 网关节点程序流程图
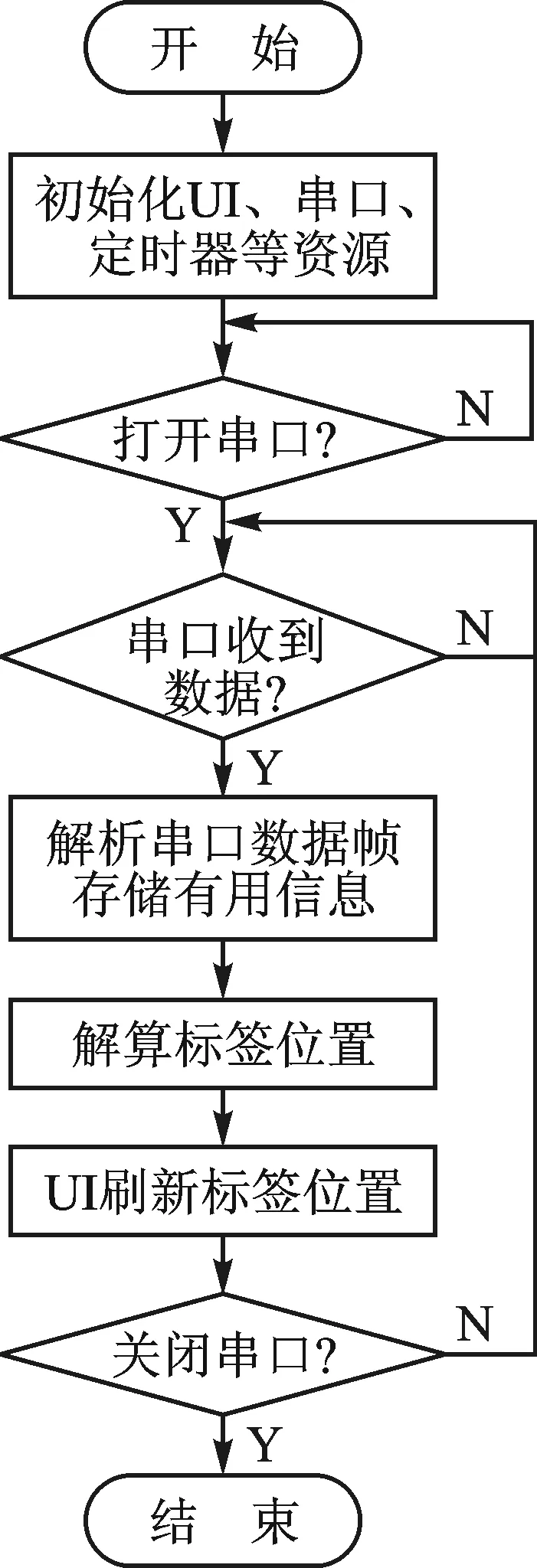
图7 PC端位置解算平台的主程序流程图
2.1 Advanced-SDS-TWR算法减小时钟漂移带来的测距误差
由于设备时钟的实际频率相对于标称频率存在误差,所以设备的时钟发生漂移。假设在短时间内,设备的时钟漂移不变,并且不考虑量化误差,那么,设备的本地时间tlocal与真实时间ttrue之间的关系模型[5-8]为:
tlocal=(1+δ)ttrue+μ
(1)
其中,δ是实际频率相对于标称频率的时钟漂移系数,μ是时钟的初始偏移量。
现有的多种基于到达时间的测距机制和算法受时钟漂移影响的程度不同,下面将对比时钟漂移给图8中三种典型的测距机制带来的误差大小,其中,对图8(b)所示的SDS-TWR测距机制讨论两种算法,最终从4种算法中选定一款算法用于本系统测距。
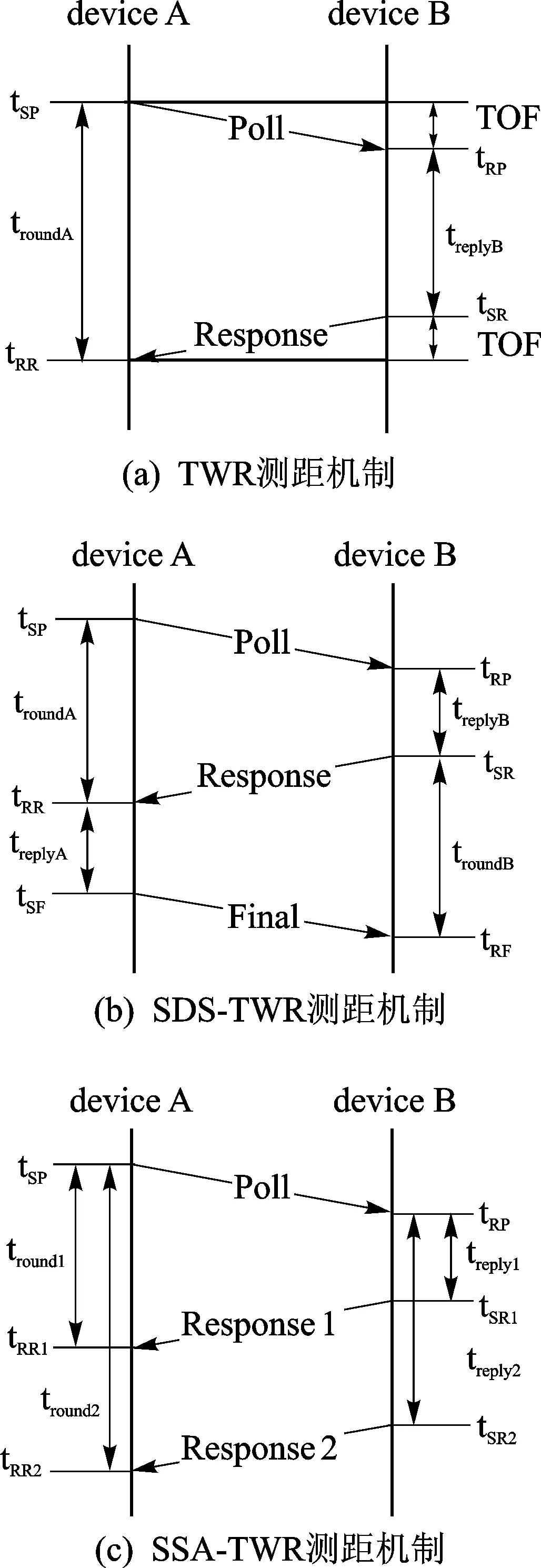
图8 三种典型的基于TOF的测距机制
如图8(a)所示,设备A与设备B进行基础的双向测距(Two Way Ranging, TWR)。TOF的真实值TOFtrue与测量值TOFtest分别为:
(3)
由式(1)、(2)和(3)可得,
(4)

errorTWR=TOFtest-TOFtrue

(5)
在TWR的基础上,被普遍运用的测距机制是双边双向对称测距(Symmetric Double-sided Two Way Ranging, SDS-TWR)。SDS-TWR的测距交互过程如图8(b)所示,在设备A接收到来自设备B的Response之后,还需向设备B发送Final帧。SDS-TWR机制的两种TOF算法如式(6)和式(7)所示:
(6)
TOFSDS-TWR_ADVANCED=

(7)
其中,tRoundA=tRR-tSP,tRoundB=tRF-tSR,tReplyA=tSF-tRR,tReplyB=tSR-tRP。
由式(1)和式(6)、式(1)和式(7)分别推导出
(9)
将式(8)和式(9)均减去TOFtrue,得
(11)
同样可以推导出时钟漂移给图8(c)中SSA-TWR测距机制带来的TOF误差为:
errorSSA-TWR=δATOFtrue
(12)

2.2 天线延迟校准
DW1000射频收发器遵循的物理层协议是IEEE802.15.4,物理层帧结构如下所示:

PreambleSFDPHRData
物理层帧包含前导码(Preamble)、帧界定符(SFD)、帧头(PHR)和数据(Data)4部分。射频收发器的内部结构如图11所示,其由前端模拟部分和后端数字部分组成。根据IEEE802.15.4协议,在射频收发器发送或接收一帧测距消息时,数字电路将PHR的第一个bit离开或到达数字电路的时刻作为整帧的发送或接收时间戳,也就是说,DW1000射频收发器测得的时间戳并不是信号离开或到达天线的时刻,其中包含天线延迟。为了获得信号离开或到达天线的时刻,需要对射频收发器测得的时间戳进行天线延迟校准。由图11可知,信号离开和到达天线的时刻的计算公式分别为式(13)和式(14):
tTX=tMSTX+tADTX
(13)
tRX=tMSRX+tADRX
(14)
其中,tTX、tRX分别是信号离开和到达天线的时刻;tMSTX、tMSRX分别是射频收发器测得的信号发送和接收时间戳;tADTX、tADRX分别是发送和接收时的天线延迟,它们的取值依靠实验经验获得。DW1000射频收发器
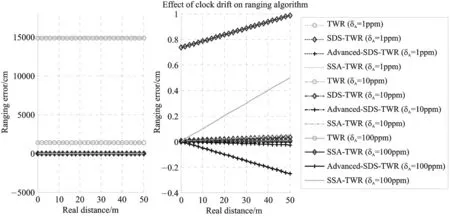
图9 δA给4种算法的测距结果带来的误差大小对比
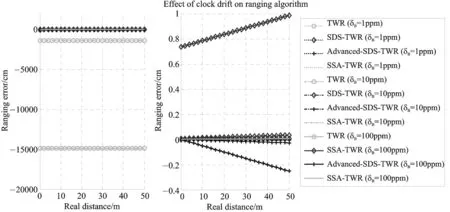
图10 δB给4种算法的测距结果带来的误差大小对比
的驱动程序为天线延迟校准提供了接口,开发者向DW1000的寄存器写入天线延迟校准参数,DW1000的数字电路在测得帧发送或接收时间戳之后自动校准天线延迟,并修正时间戳,最后将经过修正的时间戳写入寄存器,主控制器通过SPI读取寄存器即可获得信号离开或到达天线的时刻。经过天线延迟校准后,距离测量值更接近真实值。
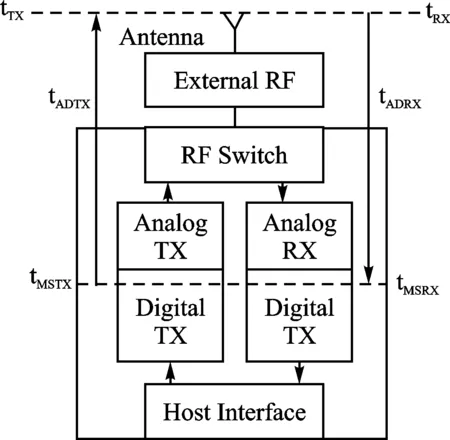
图11 DW1000射频收发器示意图
3 约束线性最小二乘定位算法

ti=(di+ni)/ci=1,2,3
(15)

(16)

i=1,2,3
(17)

Az=b+α
(18)
于是,可以求得z为
z=(ATWαA)-1ATWαb
(19)
其中,
(20)
以上求得的z中包含估计误差Δz,其值和其方差为:
Δz=(ATWαA)-1ATWαα
(21)
cov(Δz)=(ATWαA)-1
(22)
利用向量z=[xyx2+y2]T元素间的相互约束关系进一步精确估计标签坐标。假设标签坐标的精确估计值为[x′y′]T,结合z和Δz可得
(23)

Gu=h+β
(24)
于是,求得u为
u=(GTWβG)-1GTWβh
(25)
其中,
(26)
因此,标签坐标的精确估计值为
(28)
4 实验过程及性能分析
为测试本系统的性能,本文在如图12的室内停车场开展测距实验和定位实验。该室内停车场的每个车位长4.75 m,宽2.40 m,两排车位之间的距离为5.00 m。本文采用均方根误差(Root Mean Square Error, RMSE)来评价系统的测距精度和定位精度。
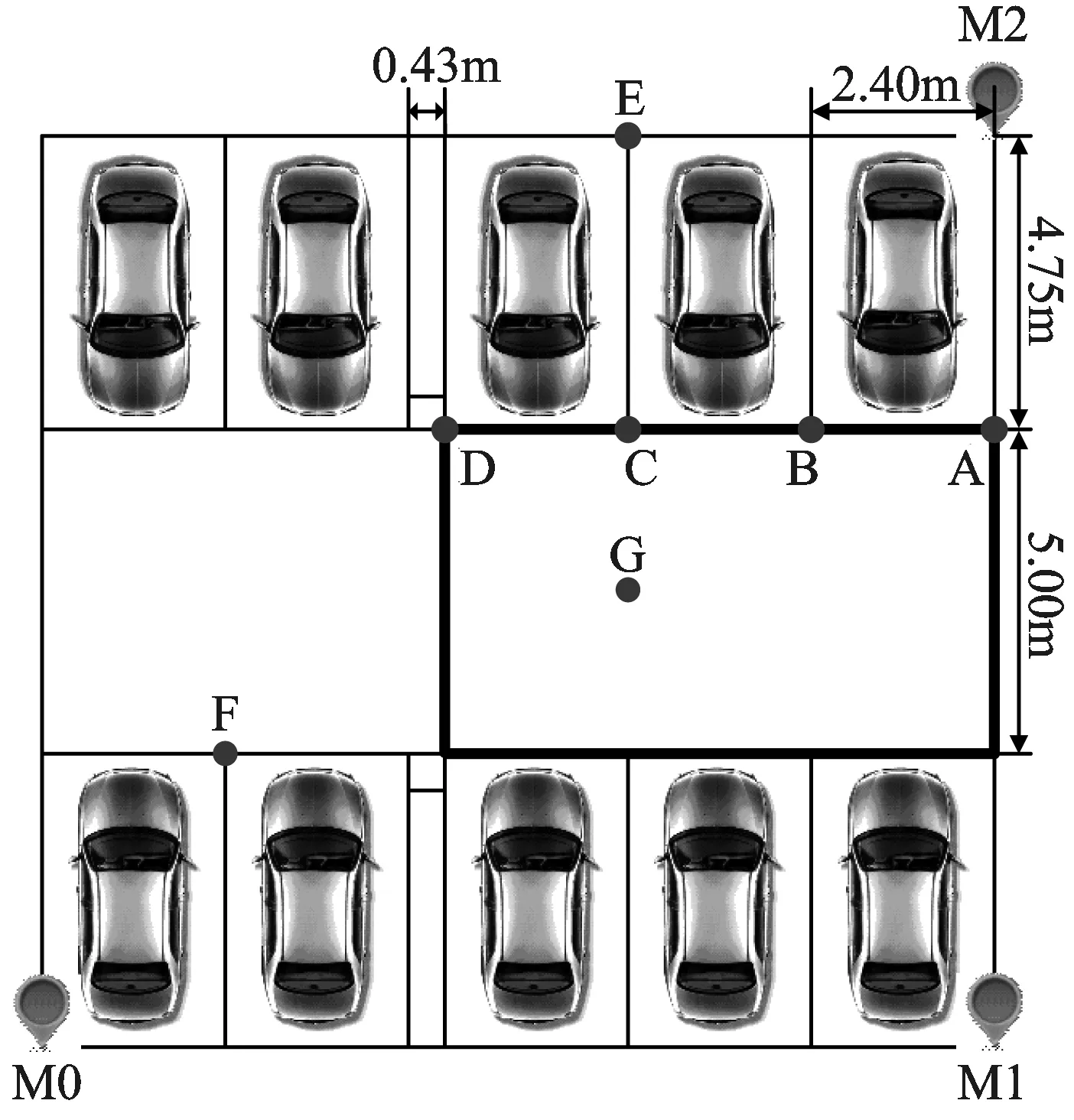
图12 实验场地布局图
4.1 测距实验
采用定点测距的方式,分别测量图12中AB、AC、AD、CE 的长度,每个距离测试200次。表1为每个距离的200个测量值的均值、均值相对于真实值的误差以及RMSE。从表1可以看出,本系统的距离测量结果与真实值之间的误差小于4 cm, RMSE也小于4 cm,即测距精度均不超过4 cm。
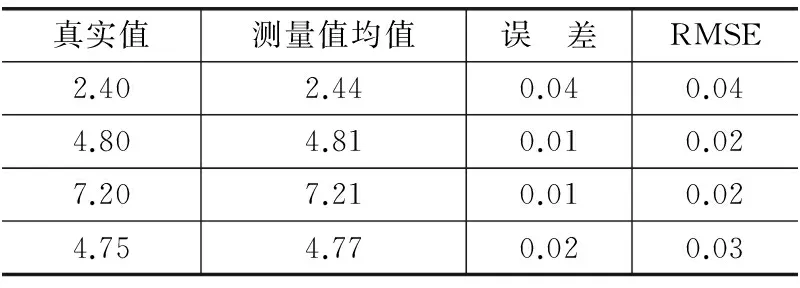
表1 定点测距结果统计表 (单位:m)
4.2 定位实验
三个锚节点M0、M1和M2依照图12所示的位置被部署,分别以M0M1、M1M2所在的直线为X轴、Y轴,则M0的坐标为(12.43, 0, 0),M1的坐标为(0, 0, 0),M2的坐标为(0, 14.5, 0)。定位实验分为定点定位和移动跟踪两部分。首先,对图12中的点B、C、D、F、G进行定点定位,每个点采集200个定位结果,它们的均值、RMSE如表2所列。
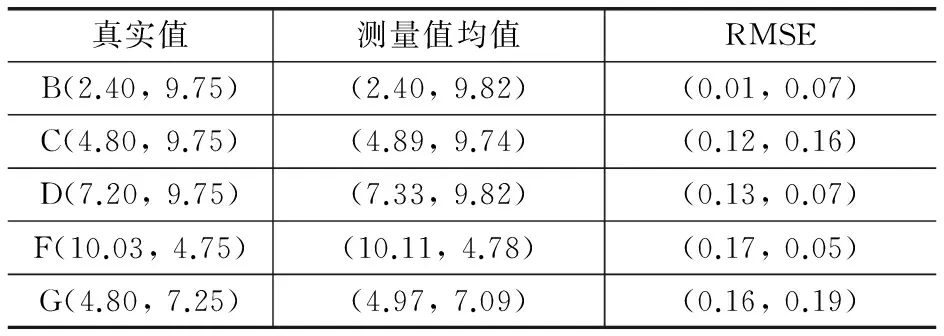
表2 定点定位结果统计表 (单位:m)
从表2可知,定位的测量值均值相对于真实值的误差不超过20 cm,由RMSE表征的定位精度也不超过20 cm。然后,让标签节点沿着图12中的粗线条轨迹运动,记录沿途所有定位结果,得到图13所示的定位轨迹。可以看出,定位轨迹能够较准确地反映标签的真实运动轨迹,但存在一些偏差较大的点,定位结果偏差较大的原因可能是标签在移动过程中,其与锚节点之间的测距信号不稳定,造成测距结果偏差较大,使得定位结果偏离轨迹。总体而言,本系统具有良好的跟踪效果。
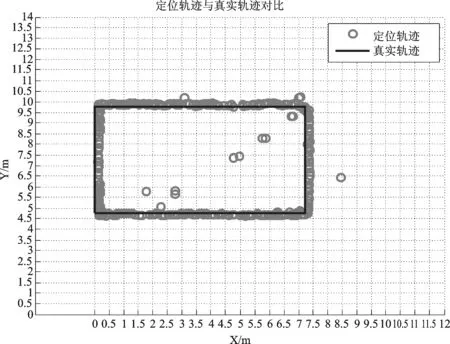
图13 定位轨迹与真实轨迹对比图
结 语
本文设计并实现了一套UWB室内停车场定位系统,完成UWB定位系统的硬件设计和软件设计。分析测距误差来源,并从时钟漂移和天线延迟校准角度采取措施,减小测距误差。运用约束线性最小二乘算法解算标签位置。测试得到本系统的定位精度达到厘米级别,能够满足室内停车场车辆定位的需求。
后续通过更多实验更精准地调整天线延迟参数,能够进一步减小测距误差。并且,将原始测距结果进行预处理后再进行定位,能够有效防止定位结果偏差较大的突发问题。此外,由于汽车行使过程具有位置连续的特点,后续

[1] 宋英娟.智能停车场车辆RFID定位关键技术研究与设计[D].南京:南京邮电大学,2014.
[2] 谢中啸,韩圣伟.蓝牙4.1基站组网的停车场定位系统设计[J].单片机与嵌入式系统应用,2016(3):16-18.
[3] 黄旭,范婧,吴茂念,等.基于Wi-Fi指纹定位技术的智能停车场系统的设计与实现[J].计算机科学,2016,43(s1).
[4] 钱承山,蒋奇峰,茅韵怡,等.基于物联网技术的智能停车场系统的设计[J].物联网技术,2016,6(7):26-27.
[5] Mikhaylov K,Tikanmäki A,Petäjäjärvi J,et al.On the seletion of protocol and parameters for UWB-based wireless indoors localization[C]//International Symposium on Medical Information and Communication Technology.IEEE,2016:1-5.
[6] Dardari D,Conti A,Ferner U,et al.Ranging With Ultrawide Bandwidth Signals in Multipath Environments[J].Proceedings of the IEEE,2009,97(2):404-426.
[7] Sivrikaya F,Yener B.Time synchronization in sensor networks: a survey[J].Network IEEE,2004,18(4):45-50.
[8] 周贤伟,韦炜,覃伯平.无线传感器网络的时间同步算法研究[J].传感技术学报,2006,19(1):20-25.
[9] 袁鑫,吴晓平,王国英.线性最小二乘法的RSSI定位精确计算方法[J].传感技术学报,2014(10):1412-1417.
[10] W Wang,G Wang,J Zhang,et al.Robust Weighted Least Squares Method for TOA-Based Localization Under Mixed LOS/NLOS Conditions[J].IEEE Communications Letters,2017,21(10):2226-2229.
[11] 谷红亮,史元春,申瑞民,等.一种用于智能空间的多目标跟踪室内定位系统[J].计算机学报,2007,30(9):1603-1611.
陈旻哲(硕士研究生),主要研究方向为嵌入式应用开发;熊诚(硕士研究生),主要研究方向为嵌入式系统;刘守印(教授),主要研究方向为通信系统及物联网。
猜你喜欢
科学(2020年3期)2020-01-06
电子制作(2018年9期)2018-08-04
现代电子技术(2017年14期)2017-07-25
电子制作(2017年7期)2017-06-05
电子制作(2016年15期)2017-01-15
中国石油石化(2015年17期)2015-06-01
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
电子技术应用(2012年5期)2012-04-01
电脑与电信(2012年5期)2012-03-30