大功率电动有缆多旋翼飞行器抗电磁干扰技术
2018-04-12 11:45蒋文皓肖蓉青孙梓萌
数字通信世界 2018年3期
蒋文皓,江 和,肖蓉青,孙梓萌,骆 颖
(中国直升机设计研究所,景德镇 333001)
本文有缆多旋翼飞行器方案采用地面供电装置提供的800V直流电与机体电性连接,机载电源转换模块为非动力功能模块分配电能模式。与现有多旋翼无人飞行器搭接电池的方案相比,有缆多旋翼在飞行器电动机和其他设备可承受范围内,几乎可以无限延长飞行时间。
高压电源的设计方案使得有缆多旋翼飞行器需相对较小的电流,地面供电装置与飞行器间连接电缆的直径可减小,因此飞行器悬挂电缆单位长度重量减轻,从而减轻飞行器重量。但是,高压电的设备之间电磁干扰也是难题[1]。
有缆多旋翼飞行器内部高压设备与低压设备构成的复杂电气环境是影响飞行试验的最主要因素,在试验过程中需采用最合理的抗电磁干扰手段使飞行器长时间,稳定飞行。
1 系统原理及故障问题
1.1 系统原理
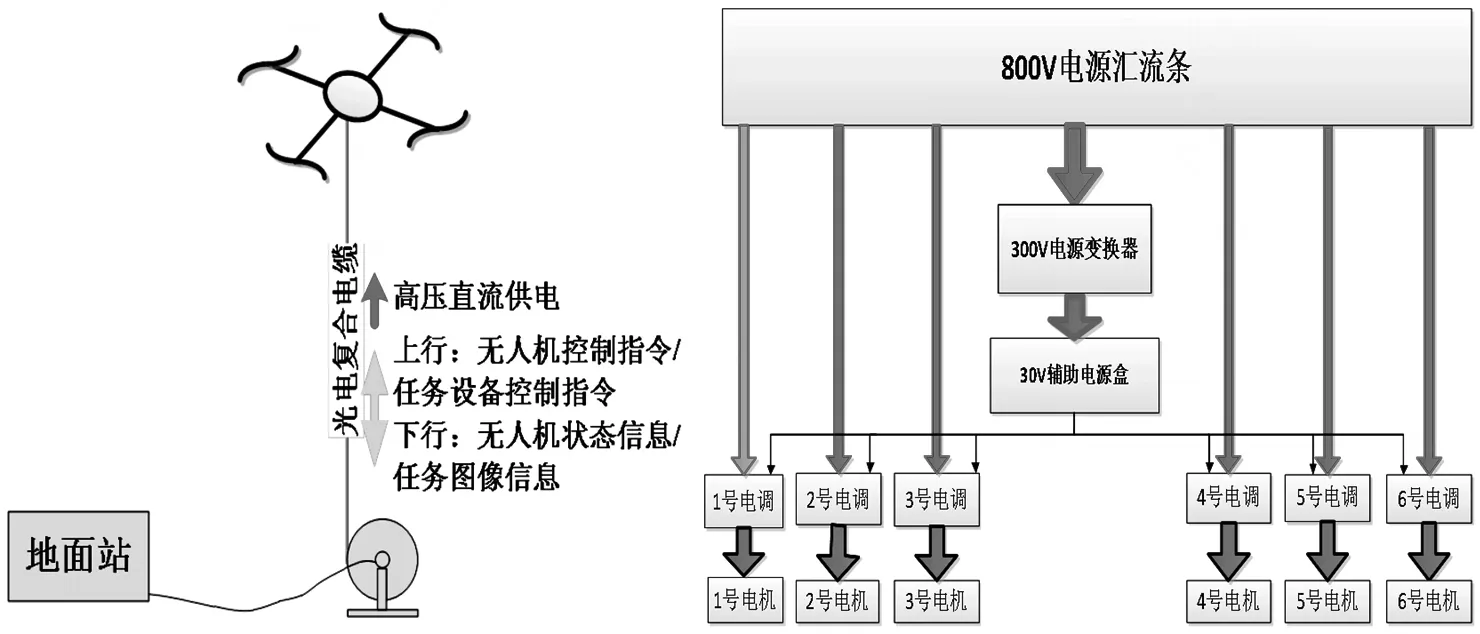
图1 有缆多旋翼飞行器动力系统
如图1所示,全机输入电压为800V通过电源变换器和辅助电源盒将输入电压分别转化为300V、30V和12V。其中800V为电机运转动力电源,30V为电调控制电源,12V为任务设备工作电源。
有缆多旋翼飞行器全机约50kg,由六个电动旋翼通过转速变化提供升力,在转速2300rpm时飞机获得离地升力,额定转速为3400rpm。
1.2 故障描述
经过地面全机运转试验发现,在高转速(≥2000rpm)及高频率调速(≥200rpm/s)运行状态下,频繁发生电机报故停转现象。测控站检测到的故障信息有驱动故障、电源低压故障、驱动过热故障三种,针对系统设备检测后未发现实际故障现象。
1.3 故障分析
对比试验在相同高转速及高频率调速状态下,有缆多旋翼飞行器单台电调、电机地面台架试验运转良好无故障的试验结果。可初步推断为有缆多旋翼飞行器运转时系统间电磁干扰引起的故障现象。
2 电磁干扰故障分析
任何电磁兼容问题都包含三个要素:即干扰源、敏感源和耦合路径。这三个要素任中缺少任何一个,电磁兼容问题都不会存在[2]。
2.1 干扰源
有缆多旋翼单套电机、电调运转时对应的转速、电流、电压、拉力如表1所示。因此分析本由表1数据可知,转速变化过程中电压基本不变,电流随转速变化呈指数级增长。由的突然变化会产生辐射现象,导致电磁干扰[3]。
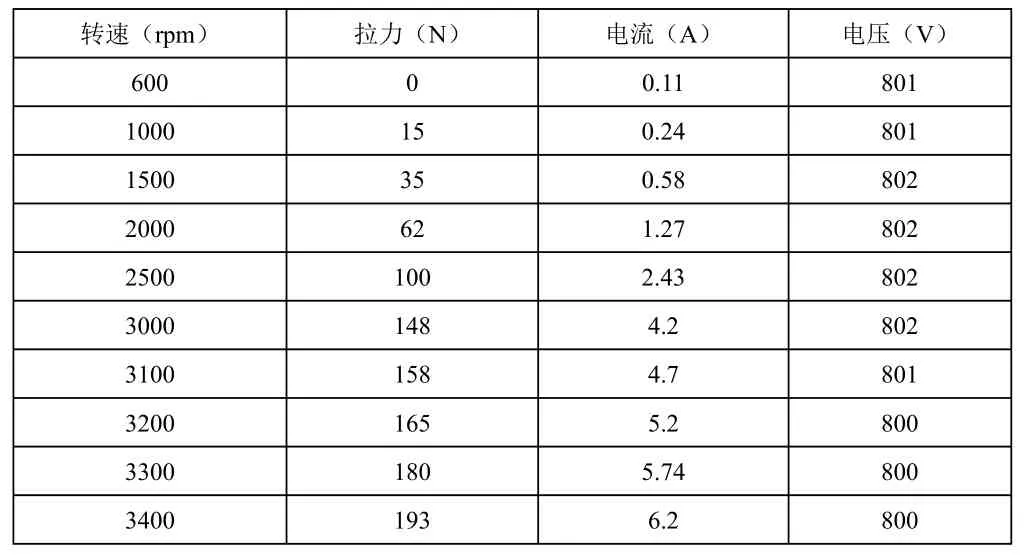
表1 电机转速、拉力、电流、电压关系
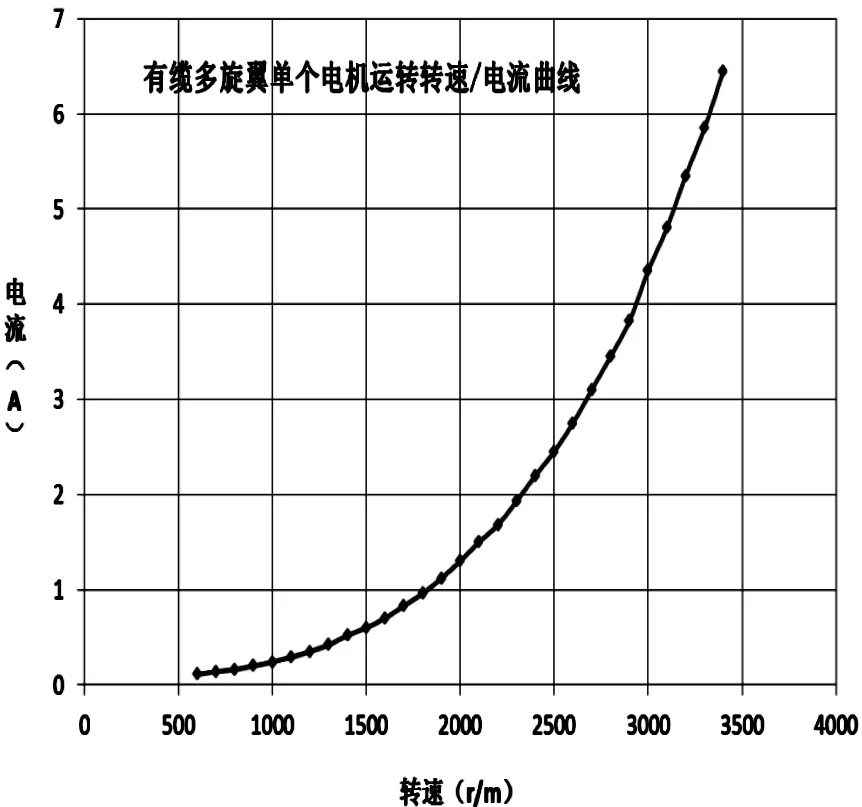
图2 电机运转转速/电流关系图
由图2可观察出:
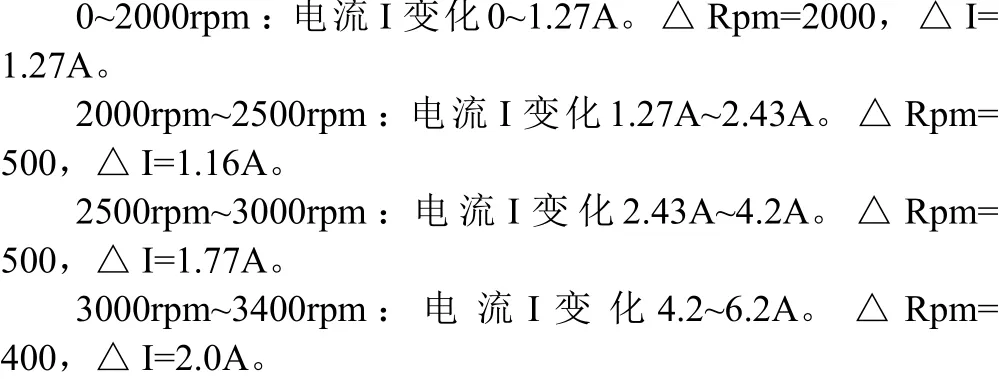
转速变化过程中电压基本不变,电流随转速变化呈指数级增长,由于dI/dt的突然变化会产生辐射现象,导致电磁干扰。
2.2 敏感源
由于有缆多旋翼系统中包含:800V的动力电路系统,30V控制电路系统,12V的任务设备系统。
因为有缆多旋翼系统在全机运转时,旋翼转速变化引起的电流变化,带来的电磁干扰。因此可能的敏感源主要是30V电调控制电路控制系统和12V的任务设备系统。
2.3 耦合路径
欧姆定律定律指出:电流流过电阻时,就要在电阻上产生电压。因此地线电流流过地线时,会在公共地线上产生电压。在整个多旋翼系统中将机壳作为所有电路的公共地,地线上的电流成分很多,电压很杂乱,因此地线噪声电压产生。
地线的设计作为机体参考点的等电位,而实际的地线上的各点电位并不相同,这样全机电气系统就不能正常工作。这就是地线造成系统电磁干扰的实质。在多旋翼系统中频率相对较低的电流,地线电流路径比较容易确定。对于频率较高的地线电流路径往往比较复杂,电流失去控制后会产生故障很难定位[4]。
3 试验故障解决方案
3.1 干扰源的抑制措施
3.1.1800V、300V、30V电缆线作电磁屏蔽处理。(1)机上800V电源输入线端用金属屏蔽层隔离;
(2)300V转换电源盒壳体接机壳,输入、输出线端用金属屏蔽层隔离。转换电源盒与辅助电源盒间连接电缆采用机体外走线路径并金属屏蔽层隔离。
3.1.2动力电缆、反馈电缆做电磁屏蔽处理并相互分离:
(1)整根反馈电缆和两端屏蔽线用金属屏蔽层隔离。
(2)动力线缆插头用金属屏蔽层和绝缘胶皮层隔离。
(3)动力线缆从旋翼支臂管内走线连接,反馈电缆从支臂外部连接,利用封闭金属支臂管达到电磁隔离效果。
3.2 耦合路径问题解决方案
试验过程中采取正负400V相对电压的输入方式。如果将输入端负极分支不接机壳,则机体表面产生约330V直流感应电压和约70V交流电压,使得有缆多旋翼在运转过程中始终处于高压带电的危险状态;如果输入端负极分支接机壳,有缆多旋翼器飞行时,系统易受到电磁干扰,故障频发。
综上所述,最终通过试验采取的可靠解决方案为:
(1)发电机与地面电源之间通过干式隔离变压器连接,地面电源采取0~800V绝对电压输入,并使输入的负极分接机壳。
(2)电调内部电路断开与电调外壳连接。
(3)断开辅助电源盒内部电路与外壳的连接。
(4)使用即在蓄电池直连辅助电源盒,不再使用300V电源变换器功能。
4 测试验证
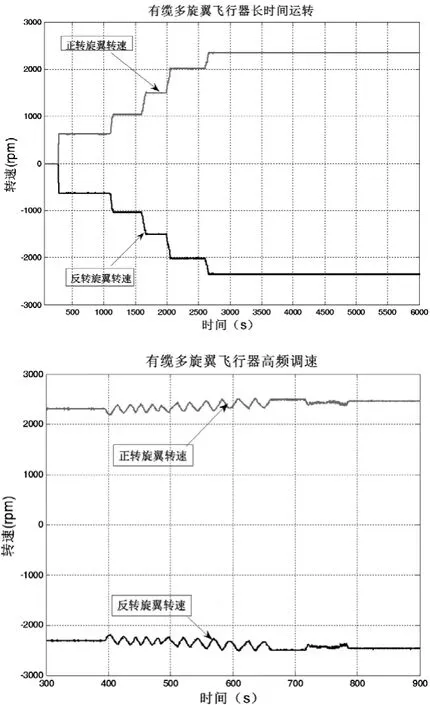
图3 多旋翼有缆飞行器长时间运转与高频调速图
通过采取上述手段,如图3所示,多旋翼有缆飞行器分别在在高转速(≥2000rpm)连续运转100min和高频调速(≥200rpm/s)模式下运行10min,运行状态良好,不再出现停机故障。
5 结束语
对于大功率有缆多旋翼飞行器系统中,高压设备与低压设备的接地处理尤其重要,不同频率、不同电压的设备应分开接地处理。防止地线噪声电压在不同设备之间相互串扰,引起一些无法准确分析原因的故障问题产生,对系统抗干扰能力起到很重要的作用。
[1]刘莉,王晓军.电磁兼容设计中的地线干扰与抑制[J].现代电子技术,2005.
[2]李艳春,生一华.电磁兼容接地和抑制干扰研究[J].山西电力,2009.
[3]王连坡.电子设备电磁兼容性设计[J].舰船电子工程,2011.
[4]吕林强.电磁兼容的接地技术[J].煤炭技术,2009.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
小资CHIC!ELEGANCE(2019年28期)2019-09-12
电子制作(2019年9期)2019-05-30
海峡姐妹(2019年1期)2019-03-23
铁道通信信号(2018年9期)2018-11-10
航空模型(2017年8期)2018-02-08
小猕猴智力画刊(2017年12期)2017-12-27
北京航空航天大学学报(2016年8期)2016-11-16
航空模型(2016年5期)2016-07-25