航管二次雷达编码器原理研究
2018-04-24 11:59于昊
现代商贸工业 2018年11期
于昊


摘 要:编码器是将类似于比特流的信号或数据进行调制、转化为可用于方便通信、传输和储存的信号的设备。作为二次雷达的重要组件,编码器在雷达的单脉冲定位中主要起到确定角度方位的作用。从研究的背景和目的出发,介绍了航管二次雷达编码器的基本知识、设计原理。随后从设计和实践角度出发,给出通用的排故流程,方便提高现场维护工作的效率,从而达到保障飞行安全的目的。
关键词:编码器;设计原理;排故流程
1 航管二次雷达编码器的分类
航管二次雷达主要采用光学编码器。此类编码器从编码形式上说,分为“增量式编码器”跟“绝对式编码器”。增量编码器在天线旋转铰链运行的同事,会输出与之对应的脉冲,同时也可以实现多圈的累加与测量。编码器的中轴每旋转一圈,都能够输出固定质量的脉冲,脉冲的数量则取决于编码器的光栅线数。若设备对分辨率的要求较高,可利用相位正交的两路信号进行倍频。绝对式编码器将特定位置设定成对应的编码,可以是数字电路中的二进制码,亦或是8421(BCD)码。根据编码发生的变化量,可以判定雷达转动方向,并且识别出天线在此时所所面向地面的位置,其中绝对零位代码还包含停电位置记忆功能。CIRIUS系统使用的是数字化程度更高的“绝对式”编码器。
在现阶段中国大陆民航空管系统所用的常见的航管二次雷达中,ALENIA雷达和INDRA雷达一般采用增量式光电编码器,而法国THALES厂家生产的二次雷达,采用的是绝对式光电编码器。
2 航管二次雷达编码器的运作原理
2.1 增量式光电编码器
增量式光电编码器的运作原理是每产生一个输出脉冲信号就会增加一个单位增量的位移,但这只是单纯的增量,并不能区分增量出现的位置。因此,这种计算只能算出相对于特定位置的位移增量,无法直接判定天线主瓣所面向的实际位置信息。
增量式光电编码器会输出两组正交信号A、B,两组信号相差90°电度角称为正交,用这种方法即可判断出旋转方向。同时还会有一个Z相脉冲作为参考点,该Z相脉冲只在编码器旋转一周时会出现一次。
Z相脉冲对积累量进行清零的标志。
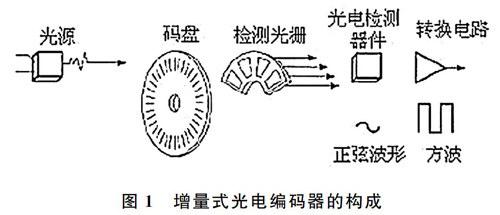
增量式光电编码器有以下几个组成部分,包括:光源、码盘、检测光栅、光电检测器件(光敏元件)和转换电路,如图1所示。
码盘上刻有等距的扇形空隙,空隙用来透过光线,相邻的两个空隙的间距代表一个时间增量;检测光栅上刻有两组透光间隙,分别为A组和B组,正好与码盘上的空隙相对应,这样可以通过或者是阻隔光源和光敏元件之间的光线。它们的缝隙间距大小和码盘上的相同,并且A、B两组透光间隙会错开1/4 个刻度,使得光敏元件在进行信号输出时能够产生90°相位差的电角度。码盘与编码器的轴承同时旋转,检测光栅则静止,光线同时穿透码盘和检测光栅,照射到光敏元件上,光敏元件就可以检测并输出两组类似于正弦波的电信号,且信号之间的相位差为90°,电信号经过后期处理,便可以计算出天线的旋转角和转速。增量式光电编码器信号的输出波形如图2所示。
增量式光电编码器具有简单易实现、分辨率高、抗干扰能力强的优点。同时,在现有条件下生产的增量式光电编码器,平均寿命可达到几万小时以上,信号传输距离较长,更为可靠。它的缺点是无法直接转动轴的转动方便,真实的转动方位也要提前进行参数设定。
2.2 绝对式光电编码器
绝对式光电编码器与增量式的构造基本一致,同样是由光源、码盘、检测光栅、光电检测器件(光敏元件)和转换电路组成,如图3所示。
与增量式光电编码器的区别在于,绝对式光电编码器通过制作不同的透光间隙来表示各类数码,这使得编码器能够直接输出数字化的信号而不需要转换。在它的码盘上沿径向划分为多个同心码道,可以看成大小不同的可以透光的扇形,相邻的两个码道,外侧码道的扇区数是内侧码道的两倍,也可以将整个码盘比作二进制数,有多少个码道该二进制数就有多少位。码盘在转动的同时,光敏元件由于受到光栅遮挡就会转换出与之对应的电平,并且最后直接以二进制数的形式输出。
这种编码器的优点在于不需要计数,码盘在旋转时,每一个位置都对应有唯一的二进制数。很容易看出,此类码盘的分辨率与它对应的码道数量呈正相关。
绝对式光电编码器使用常见的数字电路转换方式进行转换,例如格雷码、8421码等。
它与增量式光电编码器的区别是码盘的样式不同,绝对光电编码器的码盘看似很不规则,但实际上都能与特定的二进制数一一对应。所以它能够做到没有误差的累积;并且在断电时也不会丢失之前的位置信息。
绝对式光电编码器的码盘具有特殊性,根据编码形式的不同,所用的码盘也大相径庭。
图4中所示的是四位二进制码盘,a为8421二进制码盘,b为格雷码盘。图中黑色表示光线不能穿透,白色表示光线可以穿透。
图 4(a)是一个四位二进制码盘,它靠内侧的第一圈称为第一码道,透光面积与不透光面积各占50%,与最高位C1相对应,最外圈则是第4 码道,共分成16 个小窗,与最低位C4相对应。
该码盘的最小分辨率计算如下:
θ1=360°/24(1)
由上述原理可知:在相邻的码道内,总会存在外圈码道有一半分界线与内圈码道对齐,因此会由于刻度的不精确产生误差。如图5所示,当C1码道出现下图的误差后,会直接导致输出编码从0111变为0000,但是0000是错误码,并不能被使用。
图4(b)同样是一个四位二进制码盘,但与(a)不同的是(b)是循环码盘,其每个码道之间的黑白分界线是错开的,所以当码盘旋转至编码发生改变的位置时,有且只有一位编码会发生变化。这在一定程度上抑制了由于刻度不精确导致的粗误差的产生。也正以为如此,在生产和工业制造时,这种循环码盘运用的更为广泛。
3 结论
本文对编码器原理和设计思路进行了介绍,理解设计原理有助于在突发情况出现时快速找到故障点。编码器一般因受雷击或雨水腐蚀而出现故障,且对某些型号的航管二次雷达而言属于公共部分,其损坏易造成雷达设备无法正常运行,因此在日常维护时要重点对旋转铰链的运行状态进行查看。
同時,对故障设备的维修一定要对故障现场进行分析,尽可能地把器件运行的路线分析一下,这对后续的维修思路是很有帮助的,以便于提高排故效率。
参考文献
[1] 周研.thales二次雷达的系统构成及维护建议[J].科技与生活,2012,(12):173.
[2] 柳斌.关于 INDRA 二次雷达编码器及其校准方法的探究[J].实验研究Experimental Research,750009.
猜你喜欢
成都信息工程大学学报(2018年3期)2018-08-29
制造技术与机床(2017年7期)2018-01-19
电子设计工程(2017年20期)2017-02-10
考试周刊(2016年9期)2016-03-12
电子器件(2015年5期)2015-12-29
探测与控制学报(2015年4期)2015-12-15
科技与创新(2015年13期)2015-07-03
电测与仪表(2014年13期)2014-04-04