PNT体系关键技术研究
2018-05-10 18:42王冬霞袁运斌
数字通信世界 2018年4期
王冬霞,郭 睿,毛 潇,马 真,袁运斌
(1.北京卫星导航中心,北京 100094;2.大地测量与地球动力学国家重点实验室,武汉 430077)
1 引言
随着GNSS系统的不断发展和广泛应用,其信号弱、穿透能力差、易受干扰等缺点日益突出,难以满足军民各类用户的需求[1,2,3]。如何应对GNSS系统的脆弱性,建立不依赖于GNSS的PNT体系逐渐成为国内外新型导航技术研究的重要方向。
美国于2005年开始研究PNT体系,基于不同物理技术、设计原理和算法理论研发了PNT架构[4],并在2008年发布了美国PNT体系研究报告[5],2010 年发布了美国PNT体系实施规划[6]。其基本指导思想是“通过面向能力的研究方法,寻求可以满足用户需求的综合导航技术方向”,主要目标是“制定一个全面的、不依赖于GPS系统的国家PNT体系,2025年左右为美国提供更加高效的PNT能力”[6]。
于我国而言,北斗卫星导航系统尚在建设中,各类辅助和增强系统也正在发展中。杨元喜院士提出“综合PNT”概念:基于不同原理的多种PNT信息源,经过云平台控制、多传感器的高度集成和多源数据融合,生成时空基准统一的,且具有抗干扰、防欺骗、稳健、可用、连续、可靠的PNT服务信息[1]。杨院士等专家学者正在积极推进论证中国PNT体系,如何发展以北斗信息为核心、综合利用多种数据源的PNT技术,是我国亟待解决的一个研究方向。
本文首先分析了美国PNT体系的范围、策略要素、构建方法和相关技术成果,接着介绍了量子导航、脉冲星导航等未来潜在的PNT技术,在此基础上分析得出我国PNT体系的发展方向和研究内容。
2 美国PNT体系发展概况
2.1 范围
从范围上来讲,美国PNT体系是国家层面上的,信息源包括GNSS、增强系统、自主导航、深空导航、各类通信数据等,用户包括军、民、商、科研等,管理域包括各级政府机构[7],如图1所示。为方便各机构部门团结协作,于2005年专门成立了PNT体系结构研究小组(ADT,Architecture Development Team)。
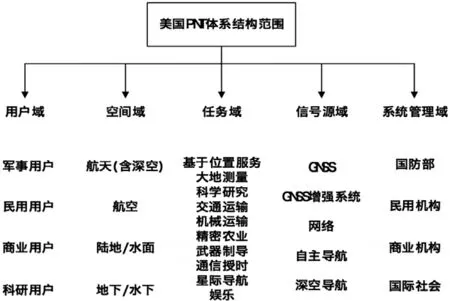
图1 美国PNT体系结构范围
2.2 策略和要素
美国实现PNT体系的策略是“最大公用数”,提供可以满足大部分用户需求的有效标准方案,如图2所示。该策略能够促进GPS现代化,采用低负荷自主特征结构,克服电磁等自然环境干扰。除了标准方案,还提供专用方案,以保证国家安全并提升服务能力,保持美国在全球PNT领域的主导地位[3]。
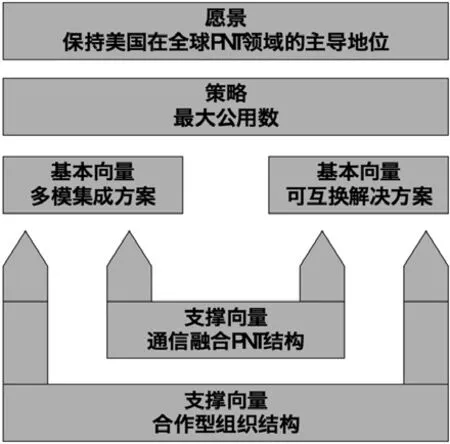
图2 PNT体系的策略和要素
在美国“最大公用数”的策略下,PNT体系包括四个支撑要素:合作型组织结构、通信融合PNT结构、多模集成方案、可互换方案,如图2所示。
2.3 构建方法
美国PNT体系遵循国家空间安全办公室(NSSO,National Space Security Off ice)的标准,通过提炼功能来构建开发体系,如图3所示。具体过程分为:数据收集、概念设计、专家指导、结构构建、分析评估等[3]。

图3 累积式的PNT体系结构开发过程
因此,美国PNT体系的构建方法可分为4步:数据收集;权衡空间构建;典型PNT结构开发;混合PNT结构开发。在体系开发过程中,权衡空间、典型PNT结构与混合PNT结构是结合需求,通过分析评估、反复讨论、迭代完善而确定的,最终形成“目标”体系。
2.3.1 数据收集
数据收集是在体系开发之前,评估PNT体系功能需求、预期目标的关键。ADT涵盖了军事、民用、商业、科研和国家安全等各领域专家,可以收集PNT体系的需求、功能、可用技术等方面的信息。
具体数据包括PNT体系相关的所有信息,ADT 需要分析未来美国的国家安全环境,并预测该环境下PNT服务的威胁和用户需求。为此,ADT划分了4个小组,分别承担未来环境预测、用户需求分析、风险管理、演化要素等数据收集工作。
2.3.2 体系权衡空间构建
综合考虑PNT体系的各种因素,包括体积、功耗、成本、自主性、信息更新速率等,ADT提取了三个权衡轴,以描述PNT技术的差异性,并提出了一种体系权衡空间,如图4所示。在权衡空间内探究全部潜在的PNT解决方案,并设计了相应的体系结构。此外,ADT还开发了50个PNT概念以支撑整个权衡空间,这些PNT概念与权衡空间的不同区域相关联,提供了典型体系结构开发的基本信息。
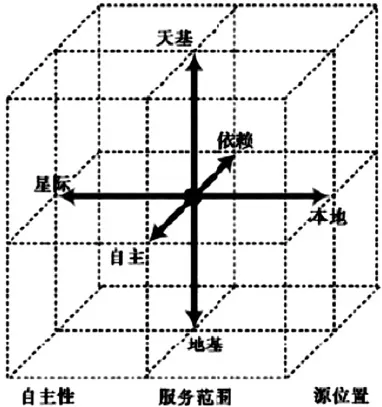
图4 体系结构权衡空间
2.3.3 典型PNT结构开发
为了分析不同PNT结构的优缺点及其对权衡空间不同区域的贡献,ADT开发了六种典型的PNT 体系结构(RA)。每种RA位于一个固定区域,考虑其满足用户需求应具备的条件,分析该区域可能的PNT解决方案。主要目的是进行深入研究,发现趋势并确定关键特性,以便开发合理折中的混合结构。
ADT对各种典型体系结构解决PNT能力缺项以及互操作、适应性、鲁棒性和持续性等指标进行评估,通过打分制来实现,结果分五个等级。
2.3.4 混合PNT结构开发
在充分考虑PNT核心要素的基础上,ADT开发了三种混合体系结构:最大公用数体系结构、以网络为中心的最大公用数PNT体系结构、可接受的最小公用数PNT体系结构。与RA不同,混合结构并不人为的限制在某部分特定权衡空间内,而是广泛合理地集成了整个权衡空间。它高效的满足了用户需求并克服了PNT能力缺项,通过集成涵盖不同类型的PNT技术来满足用户未来的PNT需求。
2.4 相关技术研究
在PNT体系研究报告及实施计划完成后,ADT 陆续组织空军、海军等单位开展了不同导航技术的研究工作[8,9],主要包括:
(1)多源信息融合技术,如:激光雷达融合导航技术;地磁室内导航技术;超宽带室内定位技术;随机信号源(SoOP)导航技术;多源传感器融合导航技术;“即插即用”全源导航技术。
(2)组合惯性导航技术,如:精确惯导(PINS)和全源导航(ASPN)相结合的自适应导航技术(ANS);微机电精确组合惯导技术;冷原子干涉组合惯导技术;GPS紧耦合组合惯导技术;惯性地磁场导航技术;图像辅助惯导技术;视觉辅助惯导技术;光学组合惯导技术。
(3)小型化PNT技术,如:微机电辅助PNT技术(Micro PNT);量子导航辅助光原子钟技术;超快激光导航技术(PULSE);恶劣环境下时空定向信息获取技术(STOIC)。
从美国目前的研究成果来看,其PNT技术方向主要有三类:多源信息融合技术、组合惯导技术、小型化PNT技术。这些技术研究为PNT体系的顺利推进打下了良好的理论基础。
3 未来潜在的PNT技术
本文广泛调研了量子导航技术、脉冲星导航技术、Locata技术等多种正在研究或具有发展潜力的新型导航技术,以指导未来PNT技术的综合发展。
3.1 量子导航技术
量子导航技术在精度和安全方面有绝对优势。量子导航的精度主要取决于量子脉冲中的光子数目,可比GPS定位精度高2-4个数量级。另外,量子加密技术的安全性很高,通过加密协议可以防止敌方破译[10],还可以检测窃听者。
英国正在研发“量子罗盘”技术,该技术不会受到数据篡改和信号干扰的影响,通过地球磁场和重力场得到精确的位置信息。其发展对于核潜艇有着至关重要的作用,与卫星导航技术相比,能够更精确定位潜艇的位置,并为发射导弹提供服务。
3.2 脉冲星导航技术
脉冲星是一种强辐射、强磁场、高温度、高密度的快速自转中子星,不易受电磁场影响,在时间基准建立和深空导航研究方面有良好的发展前景[11]。它能够为中远程导弹等近地轨道飞行器提供精确的导航信息,也能够为深空探测器、星际旅行器提供精确的导航定位和时空基准信息。此外,该技术可为GNSS提供备份,避免GNSS系统被干扰或被摧毁,具有重要的军事战略意义[12]。
国外脉冲星导航技术正处在全面研究发展的阶段,国内相关研究也取得了显著成绩,研究成果包括脉冲星辐射原理、观测方法、测量理论模型等。此外,我国500m口径球面射电望远镜(FAST)已于2016年9月25日正式投入使用,大大提高了我国巡天观测脉冲星的能力。
3.3 偏振光导航技术
偏振光导航技术利用大气或水等传播介质对太阳光的偏振特性,形成包含太阳、地球和用户位置的偏振信息,用于导航。偏振光导航技术不需要地球场数据支持,同时又有天文导航可靠性好的优点,但定位精度是影响该技术的关键。影响偏振光导航技术精度的主要因素有:传感器灵敏度、天空光偏振敏感性。由于其只能描述二维运动,通常需要组合其他的导航技术实现导航[13,14]。
从传播介质上分类,偏振光导航主要包括大气偏振光和水下偏振光。例如,大气偏振光导航技术通过测量天空光的方向,利用惯导技术提供舰船姿态和航向信息,进而实现舰船自动定位导航。当偏振光探测传感器精度为角分级时,舰船定位误差理论上优于1海里。
3.4 地磁导航技术
地磁导航技术的原理是通过地磁传感器测得实时地磁数据,与标准的地磁基准图进行匹配来定位。其关键技术包括建立高精度地磁库、研制高精度磁力仪和研究高效算法[15,16]。
2003年,美国成功研制了纯地磁导航系统,其地面/空中精度优于30m、水下精度优于500m,并逐步用于巡航鱼雷和飞航导弹;俄罗斯的研究也遥遥领先,其中SS-19导弹成功应用了地磁等高线制导技术;芬兰也成功研制了移动地图系统(InDooRatlas),通过探测不同点的地磁场强度,为用户提供室内导航服务,在没有信号的地方也能实现导航服务。
3.5 Locata技术
通过地基无线电测距进行定位,Locata技术可以在广阔环境中为单点动态定位提供厘米级实时精度,在物理障碍环境中可提供连续信号覆盖的高精度定位。
Locata网络由多个地基收发器组成,采用时间序列扩频分析技术,在覆盖区内发送同步测距信号,不依赖其他导航技术即可得到高精度定位结果,既能单独使用,也能与其他导航技术组合使用[17]。美国于2014年公开发布了《Locata接口控制文件》,详细介绍了信号结构、传输协议等,并分析了与GPS的异同点[18]。目前Locata的时间精度可达2ns。
4 对我国PNT体系发展展望
PNT体系逐渐成为国家信息建设的基石。中国PNT体系需要从国家战略角度统筹规划,指导各种PNT技术的发展,构建科学合理的PNT体系,满足军民商等各方面的PNT服务需求。
综合分析美国PNT体系概况和未来潜在的PNT技术,中国PNT体系应以北斗信息为核心,以北斗时空基准为基础,综合利用各种潜在的PNT 技术,提高容错能力和误差补偿能力[1,19]。因此,天基PNT技术、地基PNT技术、组合惯导PNT技术、多元信息融合PNT技术等将成为我国PNT体系急需研究的发展方向。
4.1 天基PNT技术
天基信息是PNT不可或缺的首要信息源。我国天基PNT技术应以北斗系统为核心,兼容美国GPS、俄罗斯GLONASS、欧盟Galileo和其他区域卫星导航系统[20]。另外,天基PNT技术还应考虑各国的星基增强系统(SBAS,Satellite-Based Augmentation System),包括美国WASS、俄罗斯SDCM、欧盟EGNOS、日本MSAS、印度GAGAN 等。除此之外,低成本低轨卫星和通信卫星可以作为天基PNT信息的来源,其信号强度有利于提升天基PNT的服务能力。
综上所述,天基PNT体系的技术优势是信息多源化,但其技术难点包括:各系统信号不一致、坐标基准不一致、时间基准不一致。因此,如何利用天基PNT信息,设计信息兼容性强、互操作性强的天基PNT网是我国PNT体系亟待解决且必须解决的关键科学问题。另外,考虑到天基PNT信息容易被干扰,如何将各系统信息与抗差估计理论等方法相结合,研究天基PNT体系的完好性,最大限度的减少信号异常对系统的影响,是有待研究的问题。另外,在重视天基PNT空间段信息兼容的同时,应同步发展天基增强基础设施,同步开发各种军民商科用户终端及其应用产业,同步构建军民商科结合的天基PNT管理机构,及时发布国家PNT政策,有效地推动天基PNT体系的发展。
4.2 地基PNT技术
为了确保国家安全,满足用户在任何环境下的PNT需求,中国PNT体系必须研究天基PNT技术的备份、并采用综合PNT来解决天基PNT能力不足的问题。
地基PNT信息包括地基增强GNSS、伪卫星与其他地基无线电PNT服务信息。目前可利用的地基PNT 系统包括:多普勒导航雷达系统(Doppler navigation radar)、罗兰系统(ROLAN)、塔康系统(TACAN)、奥米伽系统(Omega)、伏尔系统(VOR)、阿尔法系统(Alpha)等[21]。但是,这些地基信息的利用范围小,只能作为区域PNT服务的补充。
对于我国地基PNT体系而言,移动通信网络、PNT云可以作为重要的信息源。如何统筹地基PNT 信息,发展兼容天基PNT体系、覆盖面广的全球无缝地基PNT服务是相当重要的一个研究课题。
4.3 组合惯导PNT技术
惯导技术自主性强,适用于地下、水下、深空等无线电信号不易达到的区域。鉴于其低成本、易集成的优点,以及误差积累明显、精度不高的缺点,近年来,我国惯导技术在组合导航领域取得了显著发展。
因此,惯导PNT技术与天基PNT技术相结合,利用天基信息的高精度时间源对惯导信息进行累积误差纠正,利用惯导数据弥补天基导航在物理障碍环境中信号弱的缺陷,发展天基惯导组合PNT技术,为我国军民商科用户提供高精度导航,是很有意义的一个研究方向。
4.4 多元信息融合PNT技术
利用未来潜在的PNT技术,量子导航、脉冲星导航、偏振光导航、地磁导航等信息,作为天基、地基等PNT技术的补充和备份,发展以北斗数据为中心、多元信息融合的PNT技术,以适应各种产业的导航需求,构建一体化全方位的PNT架构,是我国PNT体系建设的终极目。
5 结束语
本文分层次详细介绍了美国PNT体系概况,包括范围、策略和要素、构建方法及相关技术研究。随后综述了未来潜在的PNT技术,包括量子导航、脉冲星导航、偏振光导航、地磁导航、Locata技术等。最后总结得出我国PNT体系的发展趋势体现在天基、地基、组合惯导、多源信息融合的PNT技术等方面。
[1] 杨元喜.综合PNT体系及其关键技术[J].测绘学报,2016,45(5):505-510.
[2] 刘钝,甄卫民,张风国,欧明.PNT系统体系结构与PNT新技术发展研究[J].全球定位系统,2015,40(2):48-52.
[3] Huested P,Popejoy P.National positioning,navigation,and timing architecture[C]//AIAA SPACE 2008 Conference & Exposition 9-11September,San Diego,California,2008:1140-1152.
[4] 李耐和,张永红,席欢.美正在开发的PNT新技术及几点认识[J].卫星应用,2015(12):34-37.
[5] National Security Space Of fi ce.National Positioning,Navigation,and Timing Architecture study fi nal report[R].2008.
[6] Department of Transportation and Department of Defense of USA.National Positioning,Navigation,and Timing Architecture Implementation Plan[R].2010.
[7] Department of Defense,Department of Homeland Security,and Department of Transportation.Federal radio navigation plan[R].2012.
[8] DARPA.Beyond GPS 5next-generation technologies for positioning,navigation&timing(PNT)[N/OL].2014-07-24[2014-8-26].http://www.darpa.mil/News Events/Releases/2014/0724.aspx.
[9] ELSNER D L.Universal plug-n-play sensor integration for advanced navigation[D].Air Force Institute of Technology,2012.
[10] Bahder T B.Quantum positioning system[C]//The 36th Annual Precise Time and Time Interval(PTTI)Meeting Naval Observatory Washington DC Washington 2004:423-427.
[11] 史世平,徐青.X射线脉冲星导航定位原理及应用[J].测绘科学与工程,2007,27(2):5-7.
[12] 毛悦.X射线脉冲星导航算法研究[D].解放军信息工程大学,2009.
[13] 江云秋,高晓颖,蒋彭龙.基于偏振光的导航技术研究[J].现代防御技术,2011,39(3):67-70.
[14] 祝燕华,蔡体菁,李春,徐泽杨.天空偏振光辅助的组合导航方法[J].中国惯性技术学报,2012,20(6):674-677.
[15] 郭才发,胡正东,张士峰,蔡洪.地磁导航综述[J].宇航学报,2009,30(4):1314-1319,1389.
[16] 彭富清.地磁模型与地磁导航[J].海洋测绘,2006,26(2):73-75.
[17] Gambale N.New Technology for PNT resilience[R].2014.
[18] Locata Corporation Pty Ltd.Locata Signal Interface Control Document[R].2014.
[19] Yang Y,He H,Xu G.Adaptively Robust Filtering for Kinematic Geodetic Positioning[J].Journal of Geodesy,2001,75(2-3):109-116.
[20] Mcneff J.Changing the Game Changer-The Way ahead for Military PNT[J].Inside GNSS,2010,5(8):44-45.
[21] 吴德伟.航空无线电导航系统[M].北京:电子工业出版社,2010.
猜你喜欢
国际太空(2022年1期)2022-03-09
国际太空(2022年1期)2022-03-09
空间科学学报(2021年2期)2021-07-21
空间电子技术(2020年5期)2020-03-11
航天电子对抗(2019年4期)2019-06-02
测控技术(2018年2期)2018-12-09
现代职业教育·中职中专(2018年11期)2018-06-11
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
计算技术与自动化(2014年1期)2014-12-12