
基于SolidWorks的电动储钱罐设计及运动仿真
2018-05-14 14:49姜川董岑华刘凡
工业设计 2018年1期
关键词:运动仿真
姜川 董岑华 刘凡
摘要:运用SolidWorks的建模技术,完成了电动储钱罐的虚拟设计,并利用SolidWorks motion插件对电动储钱罐的盒盖开关及硬币钩取进行运动仿真,完成所设计机构的干涉检查和运动分析,为简单机械产品的设计与分析提供了解决问题的思路。实践证明,这种方法可有效提高效率,具有良好应用前景。
关键词:电动储钱罐;SolidWorks;虚拟设计;曲柄摇杆;运动仿真
储钱罐是结构简单的生活用品,而电动储钱罐利用摆动凸轮机构和曲柄摇杆机构实现对硬币的抓取和存储,增加了技术性、趣味性、智能性。本文采用三维虚拟设计,同时以动力学为基础,借助CAE技术及相关软件,进行产品的运动仿真、虚拟样机装配等。在样机试制前可以通过仿真分析进行验证和优化,确保结构设计的正确性,有效提高设计效率,降低设计成本,提高设计质量。
1方案设计
1.1设计思路
SolidWorks提供了自上而下和自下而上两种设计方法。本文采用自上而下的设计方法,它具有符合产品开发流程、全局性强、效率高等特点。储钱罐由直流减速电机驱动,将硬币放于盒体指定位置时,触发压力传感器接通电路,机构开始工作:盒盖开启,钩子伸出将硬币钩入盒中,盒盖关闭。运行一个周期后电路自动断开。再次放置硬币,重复上述过程。
因此,存钱罐的执行机构主要完成两个动作:一是钩取硬币,二是打开和关闭盒盖,本设计前者选用曲柄摇杆完成,后者则由凸轮机构完成。根据盒体的尺寸和伸出长度,设计合理的曲柄摇杆曲线。用8字形曲线可完成钩取的动作。开关盒盖采用凸轮机构,根据曲柄摇杆的运动规律设计凸轮,包括凸轮种类、行程、基圆半径等。观察凸轮的运动规律,保证两个机构在时间上同步运动。在两个机构间利用齿轮进行传动。最后校核相关参数,对方案进行优化。
1.2设计条件和相关设计参数
储钱罐由直流减速电机驱动,电机转速为10RPM,一个工作周期为6s。
盒体尺寸:长120mm宽90mm高80mm。
盒盖抬起约30mm,保证钩子的正常伸出。钩子伸出水平长度要大于25mm,保证能够将硬币钩入盒子。
第五套人民币:1元硬币直径25mm;5角硬币直径20.5mm;1角硬币直径19mm。
2结构设计
2.1曲柄摇杆机构
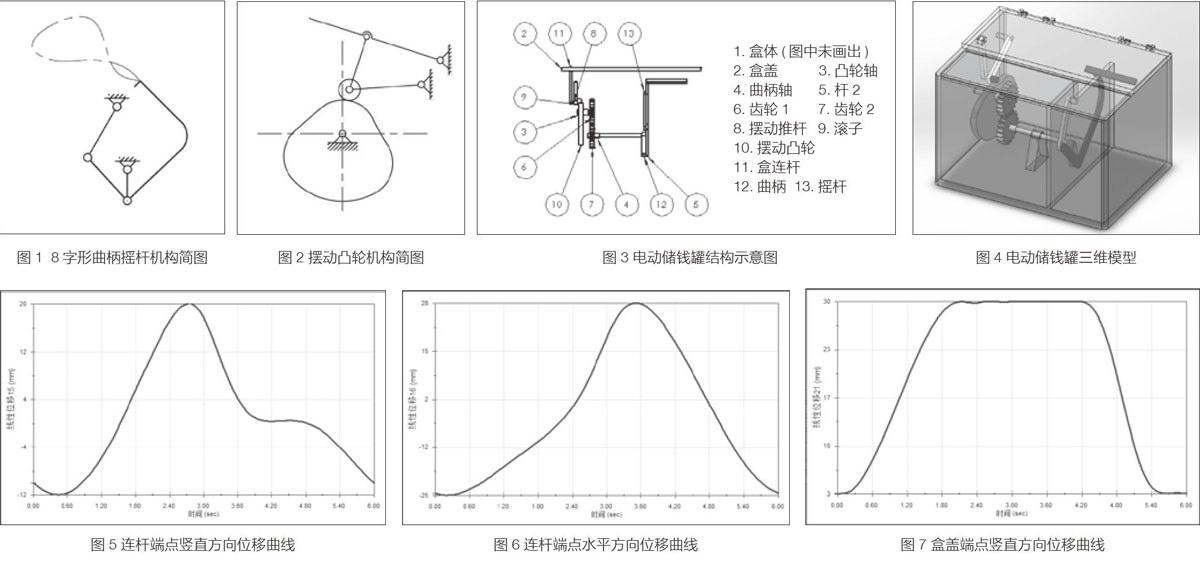
8字形曲柄摇杆机构曲柄安置在盒内,伸出的连杆末端做8字运动,有一段近水平的直线运动,可以完成对硬币的钩取,而且在完成抓取任务后能够收回盒内,能较好地实现该功能。各杆的长度、安装位置以及连杆曲线都需要反复调试。机构运动简图如图1所示。
按预定8字形轨迹,上升时连杆末端伸出盒子,再做近水平运动,然后下降收回盒中。用试验法设计四杆机构,利用SolidWorks中的Motion分析跟踪连杆伸出末端位置曲线,经过反复修改各杆的长度及安装位置。最终确定曲柄摇杆机构的参数。
曲柄长16mm,摇杆和连杆均长30mm,连杆伸出部分与连杆垂直。摇杆回转中心距盒体前壁45mm,距盒底20mm,摇杆回转中心距盒体前壁40mm,距盒底55mm。
2.2摆动凸轮机构
摆动凸轮机构能够实现通过杆的摆动来升高一定高度,而不是竖直运动,这更符合顶盖的运动规律,而且摆动推杆对压力角的要求较小。由于摆动推杆不直接与顶盖固连,所以需要增加一个与顶盖相连的连杆,来实现用摆动杆的运动带动盒盖运动。机构简图如图2所示。
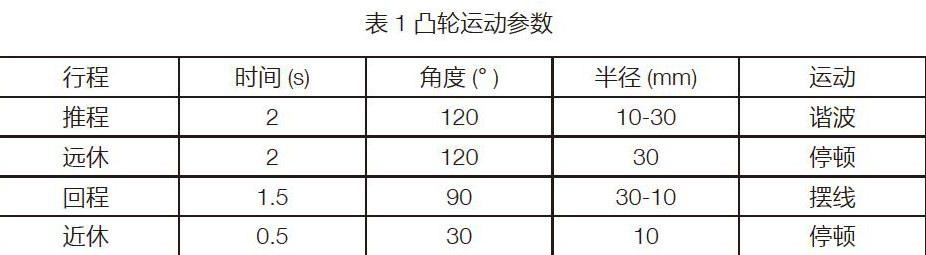
根据曲柄连杆的运动规律可设计凸轮的相关尺寸。凸轮基圆半径为10mm。凸轮轴心距盒底40mm,距盒体前壁45mm。凸轮运动参数见表1。
2.3传动机构
曲柄摇杆机构和凸轮机构分别安装相向的两侧面,两机构的输入轴平行,且运动周期相同,因此选用传动比为1:1的直齿轮实现两机构运动的传递,具体数值的选择应根据两个机构轴线距离而定。
其余的零件设计采用直接建模和关联设计两种方式,结构图见图3。
3部件和总体装配
3.1三维建模
储钱罐模型的建立是仿真和分析的前提。根据结构层次以及零部件的约束、自由度和相对运动关系,将储钱罐分为曲柄摇杆机构、凸轮摆杆机构、传动系统、盒体及盒盖4大部分。利用SolidWorks 2016进行各部分零件的三维建模。
3.2虚拟装配
首先根据零件间约束及运动关系建立好各个部分的装配体,再将4部分装配成虚拟样机。三维模型如图4所示。
干涉检查的任务是发现装配体中静态零部件之间的干涉。干涉的存在影响了零部件之间的运动关系,是建模中常见错误之一。本产品检查后未发现干涉。
4运动仿真及分析
虚拟设计完成之后,可以利用电动储钱罐的三维实体模型和SolidWorks Motion插件進行运动分析。
通过8字曲线我们了解了伸出连杆的运动路径,接着需要对它进行运动分析,主要是其在竖直方向和水平方向的线位移。根据曲柄摇杆的水平方向线位移我们能判断伸出长度是否合适。根据曲柄摇杆的竖直方向线位移规律我们才能设计凸轮机构。由于此机构6秒为一周期,运动较为缓慢,所以对于速度和加速度没有太多要求,在此不予讨论。
利用SolidWorks中的Motion分析来计算伸出部分端点在竖直方向和水平方向上的位移。结果如图5、图6。
连杆端点在水平方向能够伸出盒子28mm,能够做到将直径最大的1元硬币钩进盒中,满足设计要求。竖直方向上可以看到在6秒的工作周期中,经过2秒钟的时间上升到最高点,高度为20mm,然后下降,在3.5秒左右进行近水平运动,在4.8秒左右下降,完成一个运动周期。
利用Motion分析来计算盒盖端点在竖直方向上的位移。结果见图7。盒盖在2秒时上升至最高点30mm,4.2s时开始下降,再经过约1.5秒后回到开始位置。可见在竖直方向的运动过程中,曲柄摇杆不会与盒盖发生干涉。与预期设计的运动规律相同。 以上运动均以盒体中硬币板的端点为原点。5结论 本文对电动储钱罐进行方案设计和结构设计,运用SolidWorks等计算机软件对其进行虚拟设计和运动仿真,验证机构装配的合理性,通过分析连杆端点和盒盖端点的位移曲线,验证机构运动的兼容性,为简单机械产品的设计与分析提供了解决问题的思路。实践证明,本文采用的设计方法有效可行且设计周期短,较传统设计更为便捷有趣,在机械系统的设计中具有良好的应用前景。
参考文献
[1]陈超祥,叶修辞.SolidWorks高级教程简编[M].北京:机械工业出版社,2010
[2]孙恒,陈作模,葛文杰.机械原理(第八版)[M].北京:高等教育出版社,2013.5
[3]唐平,廖敏.基于SolidWorks的抓盘结构设计与分析[J].机械设计与制造,2012(06):53 54
[4]詹隽青,王文强,孟祥德,于永吉.基于SolidWorks的自行走装置的设计[J].起重运输机械,2011(08):49 50
[5]穆星宇.基于SolidWorks的结构分析与设计[J].工业设计,2016(01):83
[6]邵立,马登哲,严隽琪,钟廷修.虚拟制造中仿真技术的应用[J].工业工程与管理,2000(04):22 23
[7姜岳健.基于SolidWorks Motion运动仿真跟踪路径的应用[J].机械研究与应用,2014(2):187188
猜你喜欢
汽车科技(2016年6期)2016-12-19
东方教育(2016年3期)2016-12-14
科技视界(2016年17期)2016-07-15
考试周刊(2016年22期)2016-05-06
科技视界(2016年10期)2016-04-26
