
基于分数阶滑模观测的感应电机无速度传感器矢量控制
2018-05-14 13:31缪仲翠党建武巨梅韩天亮
电机与控制学报 2018年5期
缪仲翠 党建武 巨梅 韩天亮

摘 要:针对感应电机无速度传感器矢量控制中速度和磁链的观测问题,设计了一种感应电机速度和磁链的分数阶滑模观测器,该观测器综合了分数阶积分和滑模控制的优点。观测器以定子电流观测误差构成滑模面,根据李雅普诺夫定理证明了观测器的收敛性和稳定性,并设计了分数阶滑模控制律。将该观测器应用到了感应电机矢量控制系统中,实现了无速度传感器矢量控制。仿真试验表明,分数阶滑模观测器能有效减小滑模观测中的抖振,对磁链和速度有较高的动态辨识能力。而且,无速度传感器矢量控制系统在全速范围内较好的动态和稳态性能。
关键词:感应电机;矢量控制;分数阶滑模观测器;无速度传感器;磁链观测
中图分类号:TM 272
文献标志码:A
文章编号:1007-449X(2018)05-0084-10
Abstract:A rotor flux and speed estimator based on fractionalorder slidingmode was proposed for speed sensorless vector controlled induction motor drives.Advantages of fractional integral and sliding mode control were synthesized by the observer. The error between the measured and estimated stator current was utilized to define the sliding surface,the convergence and stability of the observer were proved by the Lyapunov stability theory,and then the control law was designed. The sensorless vector control using fractionalorder slidingmode observer was achieved. The simulations results illustrate that the designed observer can efficiently eliminate the chattering phenomena which exist in traditional slidingmode observer and has higher dynamic recognition for flux and speed. Moreover,the sensorless vector control system has good dynamic and stable performance in the full speed range.
Keywords:induction machines; vector control; fractionalorder slidingmode observer; speed sensorless; flux observer
0 引 言
高性能的感應电机矢量控制已在工业控制领域广泛应用。在矢量控制系统中,磁链和转速是实现坐标变换和闭环控制的必需信号。但速度传感器的装配、信号传送、环境条件限制等问题影响控制系统性能,而磁链在实际应用中很难用传感器检测到。随着计算机、控制理论等技术的发展,“无传感器”控制成为电机控制领域的研究热点和发展趋势。学者们在矢量控制系统中,将磁链和速度用同一个观测器进行观测已有大量研究,如扩展卡尔曼滤波(EKF)[1-3]、模型参考自适应[4-5]、自适应状态观测器[6-7]、滑模观测器[8-10]、高频信号注入法[11-12]、人工神经网络[13-14]等智能观测器。
卡尔曼滤波器法用于电机转速辨识能有效抑制系统噪声与电机参数变化产生的不利影响;但计算量较大,对处理器要求高。模型参考自适应法自适应速度快,较容易实现;但控制精度受参考模型的准确性影响,而且在低速时磁链计算受定子电阻和积分偏移的影响较大,并且参数自适应律的选取是存在的一个难题。高频信号注入法虽然能获得较好的速度估计性能,尤其是为电机在极低速下观测提供了新思路;但会增加电流谐波、电损耗和转矩振动、电机通用型差等,而且在应用中有些问题需解决,如高频率电流信号的采样、信号的滤波以及产生的时延等。人工神经网络观测法有良好的自学习能力,对电机的数学模型依赖性强,有较好的动静态性能;但算法实现和硬件实现较困难。自学者Utkin将滑模控制理论应用于电机控制[15]以来,基于滑模控制理论方法对电机参数变化不敏感,具有较强的鲁棒性,计算量较少,容易实现等特点,近年来成为国内外研究的热点[16]。在滑模控制中滑模面的选取是关键,滑模控制因切换控制策略、系统惯性、开关时间空间滞后等多种原因,会在滑动模态阶段使系统存在强烈的抖振,过高的抖振会给系统增加能耗,激发未建模型的危害[17]。滑模控制中的抖振问题制约了其应用。为克服滑模控制的抖振问题,文献[18]采用了二阶滑模观测器,文献[19-20]采用了高阶滑模,既保证了滑模的鲁棒性,也有效抑制了抖振现象,但不管是二阶还是高阶滑模,其模型复杂,对参数的选取要求较高。
近几年随着对分数阶理论研究的深入,分数阶微积分与滑模控制相结合,由于增加了分数阶微积运算的两个自由度的可变性,利用分数阶微积分的记忆和遗传特性,能够进一步提高滑模控制的品质和综合性能,对具有模型不确定性和存在外部扰动的系统有更强的鲁棒性,而且能够有效减小滑动模态的抖振[21-24]。分数阶滑模控制作为系统控制器在不同的领域得到了广泛的应用。如文献[25]将分数阶滑模控制策略应用于永磁同步电机控制中,利用分数阶微积分特性,缓慢地传递系统能量,有效地削减了抖振。文献[26-27]针对挠性航天器姿态跟踪控制问题和主动震动抑制问题,在滑模面与控制输入中均引入分数阶微分算子,使得控制系统具有更好的快速性和强的鲁棒性;文献[28]提出一种递归分数阶全局快速滑模控制策略,并利用分数阶微积分的随时间缓慢衰减的特性削减抖振;文献[29]针对被控对象参数时变和外部扰动问题,提出了基于神经网络和自适应控制的分数阶滑模控制,保持了滑模控制器对扰动和参数变化的鲁棒性,同时也有效地抑制了抖振。与此同时,将分数阶滑模理论用到系统的观测器,也得到了一定的发展。如文献[30]对分数阶滑模观测器进行了理论分析,并针对一类混沌系统的典型状态方程进行了仿真验证,但并没有针对具体系统进行验证。文献[31]对锂离子电池负荷状态进行了分数阶滑模观测,并将观测值应用到控制中提高了控制的鲁棒性。文献[32]对感应电机的磁链进行了分数阶滑模观测,但并没有对速度观测进行研究。而文献[33]用分数阶滑模观测器对感应电机的转速和磁链进行了观测,但只是在开环状态下验证了其有效性,并没有应用到矢量控制系统中。
目前文献对分数阶滑模观测器研究较少,为了进一步深入研究分数阶滑模观测器,提高感应电机无速度传感器矢量控制性能,本文提出用分数阶滑模观测器对感应电机的磁链和速度进行观测,并将所设计观测器应用到感应电机矢量控制系统中,实现感应电机的无速度传感器矢量控制。通过仿真对比分析,所设计的分数阶滑模观测器对磁链和速度观测准确、快速,并有效的抑制了抖振现象。将观测器应用到感应电机的矢量控制系统中运行稳定,特别是在零速、低速、中速和高速状态下都明显的提高了系统控制的精确性、鲁棒性。由于分数阶滑模观测器结构简单,同时也提高了无速度传感器控制系统的实用性。
1 分数阶基础理论
4 仿真试验研究
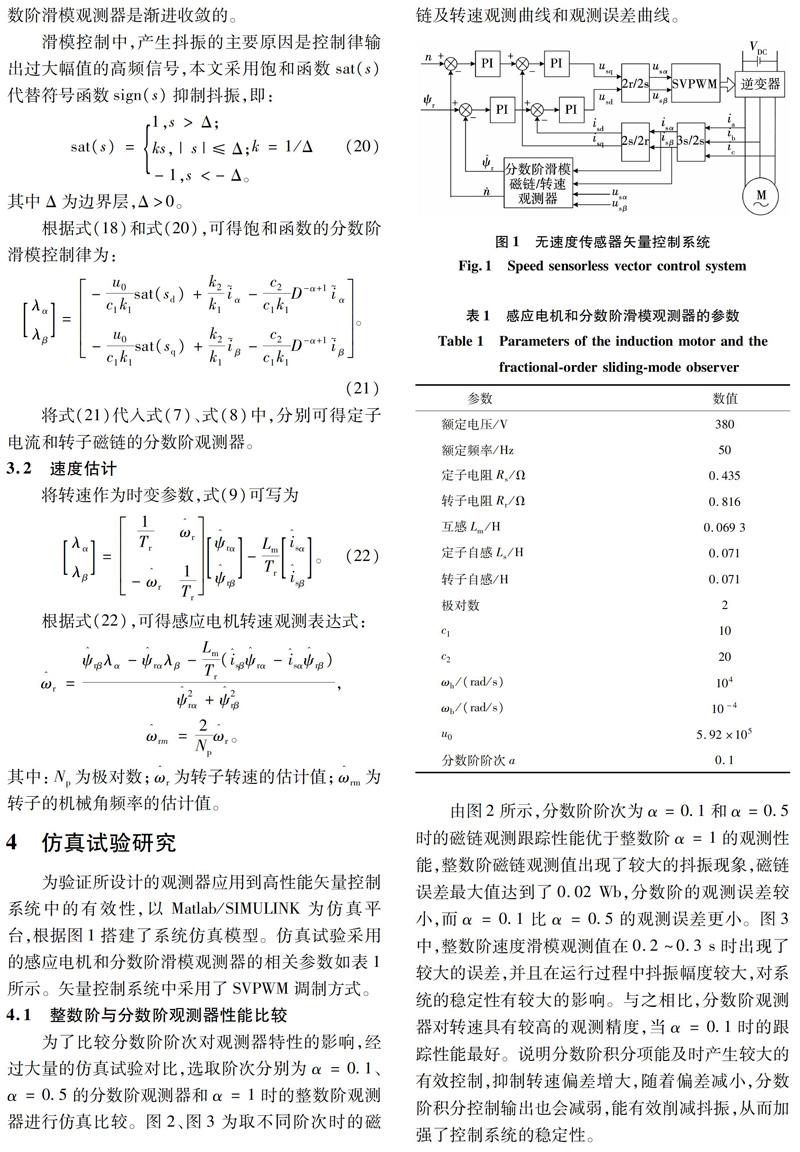
为验证所设计的观测器应用到高性能矢量控制系统中的有效性,以Matlab/SIMULINK為仿真平台,根据图1搭建了系统仿真模型。仿真试验采用的感应电机和分数阶滑模观测器的相关参数如表1所示。矢量控制系统中采用了SVPWM调制方式。
4.1 整数阶与分数阶观测器性能比较
为了比较分数阶阶次对观测器特性的影响,经过大量的仿真试验对比,选取阶次分别为α=0.1、α=0.5的分数阶观测器和α=1时的整数阶观测器进行仿真比较。图2、图3为取不同阶次时的磁链及转速观测曲线和观测误差曲线。
由图2所示,分数阶阶次为α=0.1和α=0.5时的磁链观测跟踪性能优于整数阶α=1的观测性能,整数阶磁链观测值出现了较大的抖振现象,磁链误差最大值达到了0.02 Wb,分数阶的观测误差较小,而α=0.1比α=0.5的观测误差更小。图3中,整数阶速度滑模观测值在0.2~0.3 s时出现了较大的误差,并且在运行过程中抖振幅度较大,对系统的稳定性有较大的影响。与之相比,分数阶观测器对转速具有较高的观测精度,当α=0.1时的跟踪性能最好。说明分数阶积分项能及时产生较大的有效控制,抑制转速偏差增大,随着偏差减小,分数阶积分控制输出也会减弱,能有效削减抖振,从而加强了控制系统的稳定性。
4.2 系统控制性能
将所设计分数阶滑模速度、磁链观测器应用到矢量控制系统中,实现无速度传感器的矢量控制。模拟实际运行工况,通过对控制系统进行仿真,验证分数阶滑模观测器的有效性并无速度传感器矢量控制系统的性能。
4.2.1 空载起动并运行
空载起动和空载运行是调速系统最常见的工况。当给定转速n=1 200 r/min、给定转子磁链值ψr=0.7 Wb时电机空载起动并运行,仿真结果如图4~图6所示。图4为定子α轴电流观测曲线,可见定子电流估计值i^sα可以迅速跟踪实际电流值isα,其观测误差很快收敛到零附近。图5为α轴转子磁链观测曲线,结果表明估计值ψ^rα迅速跟踪实际磁链值ψrα,由观测误差曲线可知误差数量级在10-5以内,几乎接近于零,且无明显抖振现象。定子电流和磁链的精确观测有助于电机转速的精确估计和调速的稳定运行。图6为感应电机空载运行时的速度观测曲线,可见分数阶滑模观测器的低速区能较快跟随实际值,抖动较小。由图6(b)可知,在起动瞬间有一定的观测误差,很快误差减小,速度误差在±0.2 r/min范围内。在实际运行中,由于电机转速的惯性作用,对较小误差可以起到滤波的作用,此时速度误差可忽略。
4.2.2 速度跟随性能
跟随性能是评价系统动态性能指标之一,为验证系统的跟随性,速度给定信号为斜坡信号,斜率为电机的加速度。磁链及转速仿真曲线如图7、图8所示。由图7可知,在速度变化过程中磁链观测值完全能跟踪上实际值,其观测误差数量级在10-5以内。如图8所示,在矢量控制系统中,速度观测值能实时的跟随上实际转速的变化,速度从0变化到1 200 r/min的过程中,速度观测误差都保持在±0.2 r/min以内。
4.2.3 抗负载扰动性能
负载扰动是调速系统实际运行时的常见和主要的扰动,直接影响系统运行的稳定性。为验证系统系统抗负载扰动,电机空载起动,0.4 s时突加负载转矩60 N·m,保持带负载运行。0.7 s时将负载转矩减小到30 N·m。相应的磁链及转速仿真曲线如图9、图10所示。负载突变过程中,转子α轴磁链过度平滑,负载突变时磁链观测误差保持不变,误差数量级为10-5。当外部负载变化时速度观测器依旧能准确观测速度,即使在0.4 s和0.7 s负载突变时刻,速度观测误差仍然保持在±0.2 r/min范围内不变。说明所设计的速度观测器有较好的抗负载扰动能力,相应的无速度传感器矢量系统在负载突变时能稳定运行,对负载扰动具有较强的鲁棒性。
4.2.4 变速运行特性
实际工程中,变速运行是调速系统的常见工况。为了验证速度观测器在零速、高速、中速的观察性能,速度给定在0~0.05 s时为0,0.05 s时变为1 200 r/min,0.5 s时由1 200 r/min降速为800 r/min。变速时的磁链及转速曲线如图11、图12所示。
图11为变速时的磁链观测曲线和其误差曲线,在转速突变时,转子α轴磁链能够稳定快速地跟踪到实际值的变化,观测误差小。由图12可知,电机在起动瞬间观测误差在4 r/min以内,其他转速范围的观测误差都保持在±0.2 r/min以内。说明所设计速度观测器在0速、低速、高速时都能准确的观测,无速度传感器矢量控制系统全速范围能稳定运行。
5 结 论
本文在两相静止坐标系下设计了感应电机磁链与转速分数阶滑模观测器,通过李雅普诺夫稳定性理论分析,推导出了分数阶滑模观测器的控制律,并证明了所设计观测器的稳定性。在理论分析基础上建立了分数阶滑模观测器,并应用到了感应电机的矢量控制系统中,实现了无速度传感器的矢量控制。通过模拟实际工程运行,对控制系统在不同工况的运行特性进行了Matlab/SIMULINK仿真试验。试验表明该观测器有效的抑制了滑模抖振,在无速度传感器矢量控制系统中能稳定运行,在零速、低速、中速和高速的观测精度较高,速度观测误差保持在±0.2 r/min范围内。验证了系统有较好的速度跟随性和较强的抗负载干扰性能。该观测器结构简单,易于实现,提高了实用性。
参 考 文 献:
[1] ANDRIAMALALA R N,RAZIK H,RAZAFINJAKA J N,et al. Independent and direct rotorflux oriented control of seriesconnected induction machines using decoupled kalmanfilters[C]//IECON 2011-37th Annual Conference on IEEE Industrial Electronics Society. IEEE,2011: 3488- 3494.
[2] 尹忠刚,肖鹭,孙向东,等.基于粒子群优化的感应电机模糊扩展卡尔曼滤波器转速估计方法[J] .电工技术学报,2016,31(6):55.
YIN Zhonggang,XIAO Lu,SUN Xiangdong,et al. A speed estimation method of fuzzy extended Kalman filter for induction motors based on particle swarm optimization[J]. Transactions of China Electrotechnical Society,2016,31(6): 55.
[3] 李旭春,张鹏,赵非.改进 EKF 的异步电机无速度传感器矢量控制[J].电机与控制学报,2013,17(9): 24.
LI Xuchun,ZHANG Pen,ZHAO Fei. Improving extended Kalman filter for speed sensorless vector control of induction motor[J]. Electric Machines and Control,2013,17(9): 24.
[4] 王慶龙,张崇巍,张兴.交流电机无速度传感器矢量控制系统变结构模型参考自适应转速辨识[J].中国电机工程学报,2007,27(15):70.
WANG Qinglong,ZHANG Chongwei,ZHANG Xing. Variablestructure MRAS speed identification for speed sensorless vector control of induction motor[J].Proceedings of the CSEE,2007,27(15):70.
[5] T O KOWALSKA,M DYBKOWSKI.Statorcurrentbased MRAS estimator for a wide range speedsensorless induction motor drive[J]. IEEE Transactions Industrial Electron,2010,57(4): 1296.
[6] M S Zaky. Stability Analysis of speed and stator resistance estimators for sensorless induction motor drives[J]. IEEE Transactions Industrial Electron,2012,59(2): 858.
[7] YINZ,ZHANG Y,DU C,et al. Research on antierror performance of speed and flux estimation for induction motors based on robust adaptive state observer[J]. IEEE Transactions on Industrial Electronics,2016,63(6): 3499.
[8] 路强,沈传文,季晓隆,等.一种用于感应电机控制的新型滑模速度观测器研究[J].中国电机工程学报,2006,26(18): 164.
LU Qiang,SHEN Chuanwen,JI Xiaolong,et al. A novel slidingmode observer for speedsensorless induction motors[J]. Proceedings of the CSEE,2006,26(18): 164.
[9] 孔武斌,黄进,曲荣海,等.带转子参数辩识的五相感应电动机无速度传感器控制策略研究[J].中国电机工程学报,2016,36(2):532.
KONG Wubin,HUANG Jin,QU Ronghai,et al. Research on speed sensorless control strategeis for fivephase induction motors with rotor parameter identification[J]. Proceedings of the CSEE,2016,36(2): 532.
[10] 杨淑英,丁大尉,李曦,等. 基于反电动势滑模观测器的异步电机矢量控制[J]. 电机与控制学报,2016,20(10): 23.
YANG Shuying,DING Dawei,LI Xi,et al. BackEMF based sliding mode observer for vector control of induction machine[J]. Electric Machines and Control,2016,20(10): 23.
[11] XUAN X,CHEN X.Sensorless estimation and simulation of PMSM based on highfrequency signal injection[J]. Proc.10th World Congr. Intell. Control Autom.,2012,3438–3442.
[12] 劉海东,周波,郭鸿浩,等.脉振高频信号注入法误差分析[J].电工技术学报,2015,30(6): 38.
LIU Haidong,ZHOU Bo,GUO Honghao,et al. Error analysis of high frequency pulsating signal injection method[J]. Transactions of China Electrotechnical Society,2015,30(6): 38.
[13] SUNX,CHEN L,YANG Z,et al. Speedsensorless vector control of a bearingless induction motor with artificial neural network inverse speed observer[J]. IEEE/ASME Transactions on Mechatronics,2013,18(4): 1357.
[14] MERABET A,TANVIR A,BEDDEK K.Speed control of sensorless induction generator by artificial neural network in wind energy conversion system[J].IET Renewable Power Generation,2016.
[15] UTKIN V I.Sliding mode control design principles and applications to electric drives[J]. IEEE Transactions on Industrial Electronics,1993,40(1):23.
[16] 刘彦呈,任俊杰,王宁,等. 永磁同步电机旋转坐标系滑模观测器设计研究[J].电机与控制学报,2015,19(7): 36.
LIU Yancheng,REN Junjie,WANG Ning,et al. Research of sliding mode observer for permanent magnet synchronous motor based on the synchronous rotating frame [J]. Electric Machines and Control,2015,19(7): 36.
[17] 王丰尧.滑模变结构控制[M].北京:机械工业出版社,1995.
[18] 黄进,赵力航,刘赫.基于二阶滑模与定子电阻自适应的转子磁链观测器及其无速度传感器应用[J].电工技术学报,2013,28(11):54.
HUANG Jin,ZHAO Lihang,LIU He.Sensorless control with resistance variation approach based on parallel MRAS and secondorder sliding mode observer[J].Transactions of China Electrotechnical Society,2013,28(11):54.
[19] 史宏宇,冯勇.感应电机高阶终端滑模磁链观测器的研究[J]. 自动化学报,2012,38(2): 288.
SHI Hongyu,FENG Yong. Highorder terminal sliding mode flux observer for induction motors[J].Acta Automatica Sinica,2012,38(2): 288.
[20] 吴忠强,谢建平.带扰动观测器的网侧逆变器高阶终端滑模控制[J] .电机与控制学报,2014,18(2): 96.
WU Zhongqiang,XIE Jianping. Highorder terminal sliding mode control or gridconnected inverter with disturbance observer[J]. Electric Machines and Control,2014,18(2): 96.
[21] CHANG Y H,WU C I,LIN H W,et al.Fractional order integral slidingmode flux observer for direct field oriented induction machines[J].International Journal of Innovative Computing,Information and Control,2012,8(7A):4851.
[22] HUANG J C,LI H S,TENG F L,et al. Fractionalorder sliding mode controller for the speed control of a permanent magnet synchronous motor[C]// Preceedings of 24th Chinese Control and Decision Conference. Taiyuan,China: IEEE Computer Society,2012:1203-1208.
[23] DADRAS S,MOMENI H R. Fractionalterminal sliding mode control design for a class of dynamical systems with uncertainty[J]. Communications in Nonlinear Science and Numerical Simulation,2012,17(1):367.
[24] MONJE C A,CHEN Y Q,VINAGRE B M,et al. Fractionalorder systems and controls: Fundamentals and Applications[M].NewYork:Springer,2010.
[25] 张碧陶,皮佑国.基于分数阶滑模控制技术的永磁同步电机控制[J].控制理论与应用,2012,29(9):1193.
ZHANG Bitao,PI Youguo. Fractional order sliding mode control for permanent magnet synchronous motor[J]. Control Theory & Applications,2012,29(9): 1193.
[26] 邓立为,宋申民.基于分数阶滑模的挠性航天器姿态鲁棒跟踪控制[J].航空学报,2013,34(8):1915.
DENG Liwei,SONG Shenmin. Flexible spacecraft attitude robust tracking control based on fractional order sliding mode[J]. Acta Aeronautica et Astronautica Sinica,2013,34(8):1915.
[27] 邓立为,宋申民,陈兴林. 基于分数阶滑模控制的挠性航天器姿态跟踪及主动振动抑制研究[J].振动工程学报,2015,28(1): 9.
DENG Liwei,SONG Shenmin,CHEN Xinglin. Study on attitude tracking and active vibration suppression of a flexible spacecraft based on fractional order sliding mode control.[J].Journal of Vibration Engineering,2015,28(1): 9.
[28] 刘舒其,陈志梅,赵志诚.永磁同步电机的分数阶全局快速滑模控制[J].太原科技大学学报,2014,35(3): 190.
LIU Shuqi,CHEN Zhimei,ZHAO Zhicheng. Fractional order global fast sliding mode control for permanent magnet synchronous [J].Journal of Taiyuan University of Science and Technology,2014,35(3):190.
[29] 张碧陶,高福荣,姚科.集成神经网络与自适应算法的分数阶滑模控制[J].控制理论与应用,2016,33(10): 1373.
ZHANG Bitao,GAO Furong,YAO Ke. Neural network and adaptive algorithmbased fractional order sliding mode Ccontroller[J].Control Theory & Applications,2016,33(10): 1373.
[30] DADRAS S,MOMENI H R. Fractional sliding mode observer design for a class of uncertain fractional order nonlinear systems[C]//Decision and control and european control conference (CDCECC),2011 50th IEEE conference on. IEEE,2011:6925-6930.
[31] YIN C,ZHONG Q S,CHEN Y Q,et al. Estimating thestate of charge of lithium batteries based on fractionalorder slidingmode observer[C]//Fractional Differentiation and Its Applications (ICFDA),2014 International Conference on. IEEE,2014: 1-6.
[32] CHANG Y H,WU C I,CHEN H C,et al. Fractionalorderintegral slidingmode flux observer for sensorless vectorcontrolled induction motors[C]//American Control Conference (ACC),2011. IEEE,2011: 190-195.
[33] 繆仲翠,巨梅,党建武,等.基于分数阶滑模观测器的感应电机速度估计[J].中国矿业大学学报,2016(6): 1256.
MIAO Zhongcui,JU Mei,DANG Jianwu,et al. Speed estimation of induction motor based on fractionalorder sliding mode observer[J]. Journal of China University of Mining &Technology,2016(6): 1256.
[34] 王瑞萍.基于分数阶控制器的永磁同步电动机速度控制研究[D].广州:华南理工大学,2012:13-18.
[35] 邓立为.分数阶滑模控制理论及其应用研究[D].哈尔滨:哈尔滨工业大学,2014:13-19.
[36] PODLUBNY I.Fractionaldifferential equations: an introduction to fractional derivatives,fractional differential equations,to methods of their solution and some of their applications[M]. Academic press,1998.
[37] MONJE C A,CHEN Y Q,VINAGRE B M,et al. Fractionalordersystems and controls: fundamentals and applications[M]. Springer Science & Business Media,2010.
[38] 阮毅,陈伯时.电力拖动自动控制系统——运动控制系统(第4版)[M].北京:机械工业出版社,2009: 170-173.
[39] 黄家才,张玎橙,施昕昕.基于复合积分滑模的永磁同步电机硬件在环位置控制[J].电机与控制学报,2014,18 (12): 108.
HUANG Jiacai,ZHANG Dingcheng,SHI Xinxin. PMSM position control with hardwareinloop based on composite integral sliding mode[J].Electric Machines and Control,2014,18(12):108.
(编辑:张 楠)
