VRS系统在大型跨海大桥中的应用
2018-06-02 02:59赵亚蓓荆地时建新
资源导刊(信息化测绘) 2018年5期
赵亚蓓 荆地 时建新
(1.河南测绘职业学院,河南 郑州 450005;2.中铁七局集团第一工程有限公司,河南 洛阳 471001)
虚拟参考站技术(即VRS系统)是一种基于多参考站网络环境下的GPS实时动态定位技术。该技术利用地面布设的多个参考站组成GPS连续运行参考站网络( CORS),综合利用各参考站的观测信息,通过建立精确的误差模型,在移动站附近产生一个物理上并不存在的虚拟参考站(VRS)。由于VRS位置通过流动站接收机的单点定位解算来确定,故VRS与移动站构成的基线通常只有几米到十几米,移动站与虚拟参考站进行载波相位差分改正,实现实时RTK定位。
VRS系统的工作原理是GPS流动站向数据处理中心发送它的概略位置,具体方式是用移动电话链路(如GSM等)发送标准的位置信息,数据处理中心接收此位置信息并进行差分计算后重新向流动站发送改正过的RTK数据信息[1]。VRS系统的工作流程为:参考站把观测数据传到数据控制中心,控制中心实时建立误差模型;流动站把观测数据传到数据控制中心,控制中心在移动站附近创建一个虚拟参考站(VRS);流动站接收控制中心发送的虚拟参考站差分改正信息或者虚拟观测值,进行差分解算得到用户的精确位置,从而得到厘米级的定位。
VRS系统由三个以上的固定基准站组成,站与站之间的距离可达70km,固定基准站负责实时采集GPS卫星观测数据并传送给GPS网络控制中心[2]。由于这些固定基准站有较长时间的观测数据,并通过高精度基线解算软件GAMIT进行结算,故点位坐标精度较高。
2 VRS系统在跨海大桥控制网加密中的应用
2.1 VRS系统的组成
VRS系统由三个基准站和GPS接收机、网络设备、供电设备、GPS数据处理中心、GPS用户等组成,组成框架如图1所示。VRS系统的数据流由原始数据、差分信号、控制命令信号和状态信号组成。数据中心通过通信网络接收基准站的GPS原始数据,由差分工作站作相应处理后,发送到用户,供精密定位解算。VRS系统为RTK差分定位,即接通后提供基准站观测值、星历及坐标,GSM模式下时延<2s,后处理数据可通过Internet网下载传送基准站测量原始数据、广播星历或精密星历、导航文件等。事后处理精密定位精度能达到水平方向≤3mm,竖直方向≤6mm,RTK实时定位精度,水平方向≤20mm,竖直方向≤30mm。
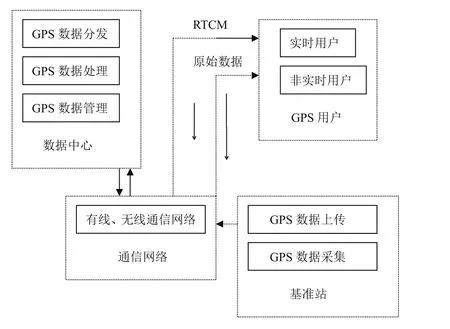
图1 VRS系统组成框架图
2.2 平面加密网的布设
海中施工加密网的布设原则是,在保证施工放样精度的前提下,要方便工程施工,满足高程贯通测量的要求,确保测量平台的稳定。施工加密控制网分陆地和海上两部分。陆地部分采用GPS平面控制和水准联测同时进行,海上部分采用测量平台方案来进行测量控制,以满足各自施工放样需要和全桥高程贯通的要求。在实施过程中,测量平台要有足够的稳定性和良好的通视性,其搭设要满足具体的技术要求。另外,为加强通航孔桥的控制,通航孔桥主墩附近可增设测量平台,以确保大桥海中工程的顺利施工。
跨海大桥加密控制网是施工测量的专用控制网,某跨海大桥按C级GPS网建立,共布设69个加密点,其中海上平面加密点有56个,陆地上加密点有13个。陆地上点位为普通标石,埋设在稳定且不宜被施工破坏的位置,海中测量加密点全部布设在专用测量平台上,海中部分控制点为普通标石,部分控制点为强制观测墩,全部点位条件均能满足GPS观测及常规测量施工放样的需要,每个点至少与相邻两点通视。某跨海大桥施工测量加密控制网布设如图2所示。

图2 某跨海大桥施工测量加密控制网布设图
2.3 GPS外业观测
为保证外业GPS观测质量,GPS观测作业前,根据观测作业量、网形设计、综合交通条件、仪器设备、运输工具以及点位的地理位置,制定了详细的观测作业计划。外业观测应严格按照计划执行,统一调度,实际作业情况有变动的,应及时作出调整。
平面控制网采用GPS静态相对定位方法完成,一级加密控制网有69个点,联测已知点12个(3个参考站点和9个首级网点)。GPS观测共投入20台GPS接收机,按照《全球定位系统(GPS)测量规范》(GB/T 18314—2001)中C级GPS网精度进行布测,为保证加密网成果精度,GPS控制网采用边连接和网连接方式布设,对于跨海长基线边每时段观测3小时,陆地区短基线边每时段观测长于70分钟,重复设站率不小于2[3]。GPS天线安置要严格对中整平,天线高的量取应精确,测前、测后量取两次,取平均值,并详细记录。作业人员按规定的操作程序进行作业,以确保接收机接收到的各种信息、数据有效和准确。
2.4 基线解算



通过检核,保留合理基线,对不合要求的基线需仔细分析、准确判断,根据需要进行合理取舍。
2.5 GPS加密网平差
2.5.1 WGS-84坐标系中的三维平差

后的约束平差计算即可。
取一个首级网GPS控制点或参考站点为基准点进行平差,来评定GPS网的内部符合精度与外业观测质量,利用基线向量改正数进行粗差检验,基线向量改正数(VΔX、VΔY、VΔZ)的绝对值应满足如下要求:
VΔX≤ 3σ; VΔY≤3σ;VΔZ≤ 3σ
若出现超限情况,一般可认为该基线或其附近的基线存在粗差,应对相关基线进行仔细分析、剔除。必要时还须补测GPS基线,直至符合上式限差的要求。
2.5.2 测区80坐标系中的平差
测区80坐标系与1980西安坐标系只在坐标轴上存在平移关系,其他系统定义相同,将1980西安坐标系下坐标成果按数学关系进行转换,从而求出加密网各控制点的80坐标系成果,因此,在1980西安坐标系下,固定所有首级网点和参考站已知点进行二维约束平差,得出各控制点的80坐标系坐标。
2.5.3 大桥施工坐标系中的平差
经过测区80坐标系平差后,在大桥施工坐标下,固定联测的全部首级GPS点和参考站点的大桥坐标,在大桥施工坐标系(投影面高程12米或50米,中央子午线120°15′)中进行二维约束严密平差,得出各控制点的大桥施工坐标系坐标(投影面高程12米或50米)。
3 结束语
VRS系统在连续运行中,数据传输较稳定,后处理定位精度高,在覆盖区域内实时定位精度都能满足海上工程质量要求,在跨海大桥的工程建设中发挥了重要作用,特别是海上桥梁工程施工时,前期海中没有测量控制点,VRS系统为保障顺利施工创造了良好条件。因此,VRS系统可作为一种成熟技术全面应用于大型跨海桥梁的施工测量控制中,对其他大型的基础工程施工有一定借鉴作用。
[1]黄凯,吕华 新.虚拟参考站技术(VRS)在城市控制网应用中精度分析[J].测绘与空间地理信息,2007,(6):144-147.
[2]杨小军.虚拟参考站(VRS)技术与差分改正信息的研究[D].成都:西南交通大学.2005:1-69.
[3]全球定位系统(GPS)测量规范:GB/T 18314—2001[S].北京:中国标准出版社,2001:2-5.
[4]周立.GPS测量技术[M].郑州:黄河水利出版社,2006:181-186.
猜你喜欢
第二课堂(小学版)(2022年5期)2022-05-26
中学生数理化·八年级物理人教版(2021年5期)2021-11-22
全球定位系统(2021年1期)2021-03-26
作文小学中年级(2019年10期)2019-11-04
科教导刊·电子版(2017年32期)2018-01-09
北京航空航天大学学报(2017年4期)2017-11-23
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
安全(2015年6期)2016-01-19
中国高新技术企业(2015年15期)2015-05-04