无人机航测遥感技术在铁路测绘中的应用
2018-06-02 03:00闫伟伟
资源导刊(信息化测绘) 2018年5期
闫伟伟
(中冶地集团西北岩土工程有限公司,陕西 西安710119)
无人机航测遥感是一种新型的低空遥感监测技术,是高空卫星遥感数据、中低空普通航空遥感的有效补充。随着国家空域主管部门对中低空无人机航空试点的放开,小型化的无人机航空摄影测量逐步在土地利用监测、矿产资源开发监测、灾害应急监测、地形图测绘、新农村建设、城市规划等领域得到应用[1],成为基础空间信息数据获取的新手段,大大提高了野外数据获取的工作效率,实现了数据的实时性、准确性和可视性。
1 无人机航测遥感技术的特点
由于航空遥感平台及传感器的限制,普通的航空摄影测量手段在获取小面积、大比例尺数据方面存在成本高、性价比差等问题。低成本、机动灵活的低空无人机遥感能在小区域内快速获取高质量遥感影像,是国家航空遥感监测体系的重要补充,是航空遥感的未来发展方向。在当今卫星遥感和普通航空遥感蓬勃发展的形势下,轻小型低空遥感是粗中细分辨率互补的立体监测体系中不可缺少的重要技术手段[2]。
低空无人机航测遥感系统,作为卫星遥感与普通航空摄影不可缺少的补充,有如下特点:无人机可以超低空飞行,可在云下飞行航摄,弥补了卫星光学遥感和普通航空摄影经常受云层遮挡获取不到影像的缺陷;由于低空接近目标,因此能以比卫星遥感和普通航摄低得多的代价得到更高分辨率的影像;能实现适应地形和地物的导航与摄像控制,从而得到多角度、多建筑面的地面景物影像,用以支持构建城市三维景观模型,而不局限于卫星遥感与普通航摄的正射影像常规产品;使用成本低、无人机体形小、耗费低,对操作员的培养周期相对较短;系统的保养和维修简便,不用租赁起飞和停放场地,灵活机动,适应性强;回避了飞行员人身安全的风险;与野外实测相比,无人机航测具有周期短、效率高、成本低等特点。
2 航测遥感系统在铁路测绘中的具体应用
2.1 测区概况
项目测区地理坐标为北纬 40°42′~43°58′,东经87°20′~96°12′。行政隶属跨甘肃省酒泉市(瓜州县、敦煌市),新疆境内跨哈密市、吐鲁番市、乌鲁木齐市。起点安北站至红柳河(甘肃境内)约160km,新疆境内约1372.5km,地势由东向西倾斜。
铁路沿线大部分为寸草不生的戈壁、荒漠,较大站场主要有柳园站、哈密站、鄯善站、吐鲁番站、乌鲁木齐站。除吐鲁番至达坂城段、安北至红柳河段地形起伏较大外,其余段较为平缓。
2.2 航测遥感系统的构成
2.2.1 系统构成
低空无人机航测遥感系统由系统硬件设备、影像处理系统、信息分析系统、业务运行保障系统等组成。
(1)系统硬件设备:包括无人机飞行平台、飞行控制系统、地面监控系统、发射与回收系统;遥感任务设备、任务设备稳定装置、影像位置和姿态采集系统等。
(2)影像处理系统:包括影像数据快速检查、纠正、拼接;DOM、DEM、DLG生产等。
(3)信息分析系统:包括信息提取、信息分析、报告自动生成、数据管理与检索等。
(4)业务运行保障系统:包括野外装备、技术标准、技术规范、与各领域业务运行相结合的软件开发和技术流程制定。
2.2.2 系统的基本配置
系统的基本配置有:天狼星无人机系统1套、地面监控站1套、发射电台1套、GPS基站1套、任务设备1套(以数码相机为主)、备品备件、专用工具、包装箱及其他配套设备。
2.2.3 天狼星无人机的部分参数设置
在本测区中,天狼星无人机的部分参数设置为:飞行余量65m,转弯半径50m,爬升/俯冲角度10/8,GPS类型是DGPS+RTK,最长飞行时间40min,地面采样距离5cm,采样距离容许差30%,航向重叠85%~75%,旁向重叠65%。
2.3 外业作业情况
(1)航摄遥感作业基本流程:技术准备、场地选择、设备检查、飞行操控、飞行质量检查、资料整理、成果移交。
(2)实时RTK定位方式:无人机上的GPS信号接收机与数码相机相连接,和地面基准站上的一台或多台GPS接收机同步且连续接收GPS信号,通过GPS载波相位测量差分定位后处理技术解算出相机曝光点的空间位置,同时利用惯导系统记录相机曝光时的姿态角,随后将两者组成的POS数据作为附加观测值引入摄影测量区域网平差模型,以空中控制代替地面控制;利用统一的平差模型和算法,通过整体平差的方式,解算出影像6个外方位元素和地面目标点空间位置,最后对其精度进行评价。实时RTK定位示意图如图1所示。
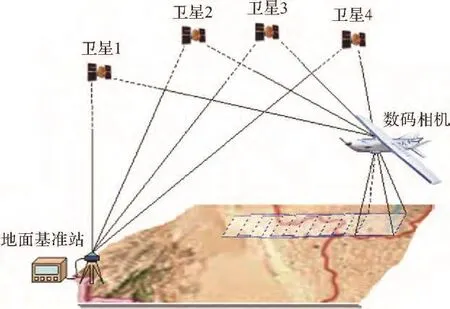
图1 实时RTK定位示意图
2.4 内业数据处理
2.4.1 数据整理
每个航飞架次完成之后,MAVinci Desktop自动下载飞机的高精度POS数据文件,并与相应的航飞影像进行匹配,随后导入Photoscan软件建立工程文件。本次飞行共18架次,利用Photoscan将18个工程合并。
2.4.2 全自动选点与相对定向
利用Phtotoscan软件从互相重叠的两幅影像上均匀地选取明显特征点,然后利用其先进的匹配算法进行两幅影像的特征点匹配[3]。
2.4.3 空三加密
利用测区中影像连接点(加密点)的像点坐标和少量的已知像点坐标及其大地坐标的地面控制点,经过平差解算,求解出连接点的大地坐标、每幅影像的外方位元素及所有加密点的地面坐标[4]。
2.4.4 DOM制作
在无需人工干预的情况下,全自动生成DSM、DEM和DOM,成果如图2所示。整个区域正射影像色彩过渡自然、影像清晰、反差适中、层次分明、纹理信息丰富,无图像处理痕迹。
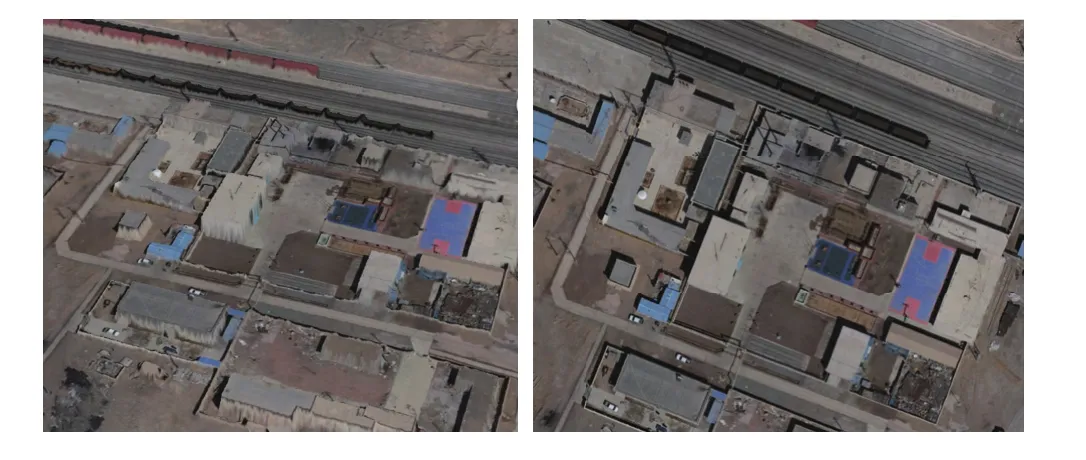
图2 DSM和DOM(部分截图)
2.5 成果精度统计与分析
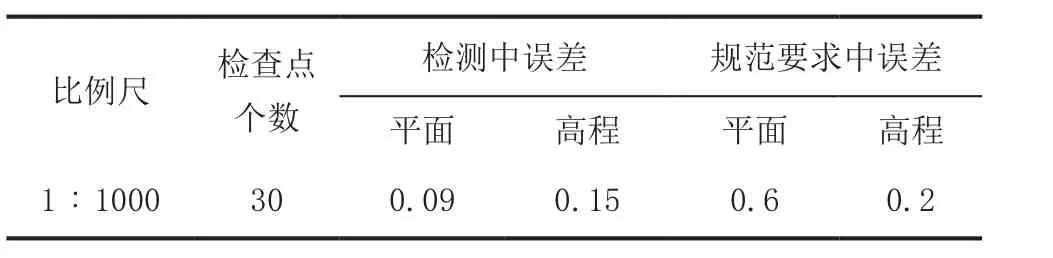
表1 平面和高程精度检查表(单位:米)
精度统计显示,在无像控情况下,直接进行相对定向和绝对定向,然后建立立体模型进行测图,大比例尺成图成果的平面精度优于规范要求,高程精度也满足规范要求。
3 航测遥感系统的优势和局限性
3.1 优势
无人机航测遥感作为空间数据采集的一种重要手段,具有影像实时传输、成本低、机动灵活的特点;效率高、成图速度快、响应速度快、精细度高、操作培训简便;在多云多雾、影像获取困难、人力难以到达的高危地区探测等方面,具有明显的可操作性优势,已成为卫星遥感与有人机航空遥感的有力补充。
3.2 局限性
目前,低空无人机航测遥感系统多使用小型数字相机作为机载遥感设备,与传统的航片相比,存在像幅较小、影像数量多等问题;由于飞行高度低, 在低空作业时受风速、风向影响较大,在不满足正常起降条件的情况下勉强起降会增加飞机损坏的可能性;飞行平台续航能力弱、地面GPS基站信号传播半径小,是提高飞行效率的制约因素。
4 应用展望
目前,最常用的遥感平台是卫星和有人驾驶的飞机, 而无人机作为一种新型的遥感平台将得到广泛应用,并已渐渐显露出它的重要性[5]。
遥感发展的一个总方向是高空间分辨率、高光谱分辨率和高时间分辨率。无人机在云层下方,受云层影响很小,在多云天气甚至阴天也能执行航摄任务。因此,无人机遥感在提高时间分辨率、空间分辨率方面具有独特优势。随着多光谱传感器水平的提高、重量和体积下降,无人机遥感在提高光谱分辨率方面同样具有潜力,如森林灭火指挥、防洪救灾等。
低空无人机航测遥感系统的发展方向:①无人机任务载荷多样化,可同时装备可见光和红外相机,或其他如激光测距等新型测量装备;②相机可同时进行可见光和红外等不同波长的摄影测量;③相机配备大面阵CCD,可提高无人机的工作效能;④使用内方位元素稳定、镜头畸变小的专业测绘相机;⑤相机具备变焦功能,当发现可疑目标时,可对其进行凝视观察,提高巡线时对故障目标的识别能力。
近年来,机载POS设备和无人机技术发展迅速,越来越多地应用在铁路测绘及其他测绘领域。具备高精度机载RTK设备的无人机航测用于生产大比例尺数字线画图、数字正射影像,精度完全可以满足要求。随着无人机及航空测量技术的不断进步,无人机测量系统必将发挥更大作用。
[1]陈姣.无人机航摄系统测绘大比例尺地形图应用研究 [D].昆明:昆明理工大学,2013.
[2]范承啸,韩俊,熊志军,等.无人机遥感技术现状与应用[J].测绘科学,2009,34(5).
[3]王聪华.无人飞行器低空遥感影像数据处理方法[D].青岛:山东科技大学,2006.
[4]李德仁,袁修孝,巫兆聪,等.GPS辅助全自动空中三角测量[J].遥感学报,1997,1(4):68-72.
[5]李军,盛新蒲,夏志宇,等.无人飞行器低空摄影技术探讨[J].测绘科学,2011,36(4):145-147.
猜你喜欢
房地产导刊(2022年10期)2022-10-18
工业设计(2022年8期)2022-09-09
建材发展导向(2021年22期)2022-01-18
军民两用技术与产品(2021年10期)2021-03-16
军民两用技术与产品(2021年10期)2021-03-16
建材发展导向(2019年10期)2019-08-24
北京航空航天大学学报(2017年9期)2017-12-18
家庭影院技术(2017年9期)2017-09-26
电子制作(2017年9期)2017-04-17
南方文学(2016年3期)2016-06-12