
基于LabVIEW的汽车防溜车模拟测试系统设计
2018-06-12 08:00黄喜军陈辉金张龙黄佳辉杨宇
现代电子技术 2018年11期
黄喜军 陈辉金 张龙 黄佳辉 杨宇

摘 要: 针对停在斜坡上的汽车可能发生溜车的情况,提出基于LabVIEW的汽车防溜车模拟测试系统。以STM32单片机为主控的智能小车模拟汽车,由上位机通过路由器发送不同的控制指令控制智能小车的移动。小车采用三维角度传感器检测坡度倾角,利用AB相编码器检测车轮旋转方向,以此判断汽车是否处于溜车状态,一旦达到溜车条件,则自动进行刹车。同时摄像头对汽车后方的图像进行采集,并将图像和测试数据通过路由器无线传输至上位机进行显示。通过实验测试表明,该系统具有开发周期短、可靠性高等特点,为汽车安全辅助测试提供了参考。
关键词: LabVIEW; 防溜车系统; STM32; 测试系统; 控制方式; 无线传输
中图分类号: TN06?34; TP273.5 文献标识码: A 文章编号: 1004?373X(2018)11?0091?04
Design of anti?slip vehicle simulation test system based on LabVIEW
HUANG Xijun1, CHEN Huijin2, ZHANG Long1, HUANG Jiahui1, YANG Yu1
(1. College of Electronic Engineering and Automation, Guilin University of Electronic Technology, Guilin 541004, China;
2. Department of Experiential Practice, Guilin University of Electronic Technology, Guilin 541004, China)
Abstract: Since the vehicle parked on the slope may slip, an anti?slip vehicle simulation test system based on LabVIEW is proposed. The intelligent car taking STM32 microcontroller as its main control chip is used to simulate the vehicle, and its movement is controlled with different control commands sent by the host computer through the router. The three?dimensional angle sensor is used to detect the dip angle of the slop, and the AB phase encoder is adopted to detect the rotation direction of the wheel to judge the vehicle whether maintains the slip state. Once the vehicle has slipped, the car will brake automatically. The image in the rear of the vehicle is collected by means of the camera. The image and test data are wirelessly transmitted through the router to the host computer for display. The experimental test results show that the system has the characteristics of short development time and high reliability, and provides a reference for the vehicle safety auxiliary test.
Keywords: LabVIEW; anti?slip vehicle system; STM32; test system; control mode; wireless transmission
0 引 言
汽车的安全设计关乎到驾驶员与路人的生命财产安全。近年来,已有部分汽车推出上坡辅助系统以减少安全事故的发生。该系统能让驾驶员松开刹车踏板后,汽车仍能持续制动数秒,方便驾驶员将脚由刹车踏板转向油门踏板,以防止溜车。但此方法仅仅在汽车正常起步时才能发挥作用,而许多溜车事故也可能发生在非起步时刻。本设计以智能小车模拟汽车,在小车达到溜车条件时,控制小车进行刹车,为防止溜车事故的发生提供借鉴。LabVIEW是一个在工业自动化控制方面应用广泛的图形化编程工具,利用LabVIEW开发汽车防溜车模拟测试系统,具有开发周期短、人机界面友好、操作简单和易维护的特点[1?4]。
1 系统设计方案
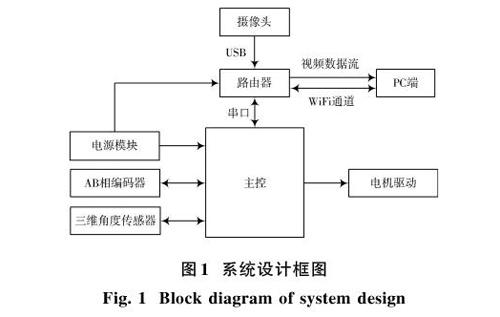
防溜车模拟测试系统应在小车发生溜车时立即控制刹车,并通过摄像头及时了解小车后方的状况。系统以STM32F103C8T6单片机作为主控芯片,采用三维角度传感器、AB相编码器检测坡度倾角和车轮转向等信息来判断小车是否处于溜车状态,并通过路由器实现智能小车与PC端的无线通信,实现防溜车模拟测试功能。智能小车的移动是通过电机驱动模块驱动直流电机实现,通过PWM方式控制来实现前进、后退、转弯或加、减速,并通过给电机驱动模块反向的电压模拟刹车。使用摄像头采集小车后方的图像,经路由器将图像和小车状态数据发送给PC端,同时PC端通过路由器向小车发送控制指令,系统设计框图如图1所示。
2 硬件设计
整个防溜车模拟测试系统分为6个主要部分:主处理器、传感器模块、摄像头、路由器、电源模块和电机驱动等。
2.1 主处理器
为了使用简便,缩短开发周期,系统选用属于STM32系列的STM32F103C8T6作为控制电路的核心部件,该款单片机属于ST意法半导体公司生产的32位高性能、低成本、低功耗的增强型系列单片机,能很好地满足系统设计需求。主控电路图如图2所示。高速外部时钟的两端连接的是12 MHz晶振,经过内部6倍频后,系统时钟可以达到72 MHz。已知复位引脚NRST最小[Vih]为2 V,由[T=-ln(1-VihVo)×R2C3],[Vo]为 3.3 V,[T]约为93 μs,系统能稳定工作。
2.2 传感器模块
2.2.1 三维角度传感器
由三维角度传感器能得到可能发生溜车的方向,辅助判断溜车是否发生。系统采用MPU6050作为三维角度传感器。MPU6050内带3轴陀螺仪和3轴加速度传感器,利用自带的数字运动处理器(Digital Motion Processor,DMP)輸出三维角度数据。DMP可以很方便地实现姿态解算,降低运动处理运算对操作系统的负荷,同时大大降低开发难度。
2.2.2 AB相编码器
AB相编码器能检测到车轮旋转方向,结合三维角度传感器获得的坡度值及发动机是否提供了动力就能判断溜车是否发生。电机尾部自带13线的磁(霍尔)编码器,集成了上拉电阻和比较整形功能,可以直接输出方波。车轮转一圈电机可以输出390个脉冲,4倍频之后是1 560个。通过编码器输出的A,B两路脉冲的相位就能判断车轮的旋转方向。车轮正转则A相脉冲超前B相90°,车轮反转则A相脉冲滞后B相90°。通过AB相编码器能检测到车轮转动(360°/1 560≈0.23°)的微小角度[θ]。并且使用STM32内部的定时/计数器可以得到5 ms内接收到的脉冲数[N],从而可以计算出车轮转速为[(N×1 000×60)(5×1 560) ]r/min。同时,也可以根据小车转动的角度和车轮的半径[R]计算出溜车距离。
2.3 摄像头
摄像头的作用是让驾驶员迅速看清车子后方的情况,能尽快做出判断。摄像头通过USB接口和路由器连接。
2.4 路由器
路由器是PC端和智能小车互连的桥梁。路由器经OpenWrt刷机后相当于一个Linux系统,再烧入ser2net和MJPG?STREAMER两款开源的固件,以实现智能小车与LabVIEW上位机的通信和图像的传输。
2.4.1 串行数据至网络数据转换
ser2net即serial port to net,能够将串行数据和网络数据相互转换。系统需要将路由器接收到的来自LabVIEW上位机的控制数据由网络数据转换至串行数据,并传送至单片机,进而实现相应的控制。同时,把小车的状态由串行数据转换至网络数据,由WiFi发送给LabVIEW上位机,进而实时监控小车状态[5]。
2.4.2 通过网络访问摄像头
MJPG?STREAMER可以通过文件或者HTTP方式访问Linux UVC摄像头,用户只需要利用浏览器就可以实现视频监控等工作。由于该固件采用开源的方式开发,因此降低了视频开发的成本,提高了开发效率。
2.5 电源模块
系统采用3节3.7 V电池分别为主控板和路由器供电,一路通过LM7805稳压至5 V给路由器供电,另一路再通过AMS1117?3.3 V稳压至3.3 V给主控板供电。
2.6 电机驱动
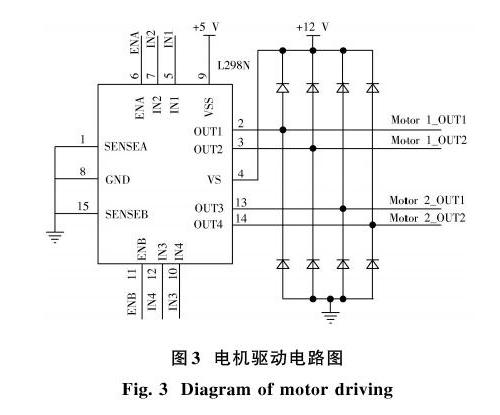
为了稳定系统,缩短开发周期,电机驱动采用L298N驱动电路。L298N是由ST公司生产的一种高电压、大电流驱动芯片,可以通过控制端口电平变化来驱动直流电机。由于电机是感性元件,驱动电路给它的驱动脉冲可产生高压损坏电路,加上4组二极管,电压就被嵌位在电源的水平上,而且有把能量回馈电源的功能。IN1~IN4接输入控制电平,控制电机的正反转。ENA,ENB一般接5 V,使能控制电机,通过PWM控制脉冲宽度可以调节电机转速,电机驱动电路如图3所示。
3 软件设计
软件设计包括传感器底层驱动的编写和模拟测试软件的设计。模拟测试软件选用LabVIEW作为软件开发平台,设计编写测试程序对系统进行测试和评价,整个系统软件架构如图4所示。
3.1 获取摄像头图像
LabVIEW是一种图形化编程语言的开发环境,能够快速创建用户界面。其中IMAQ Vision是基于LabVIEW平台的软件包,主要负责图像的处理及开发,能够完成图像的采集与读取,图像的显示以及图像的各种分析处理工作[6?8]。因为LabVIEW中没有直接获取网络摄像头的函数,所以先要将网络摄像头转换为本地摄像头。使用 IPCamAdapter这款软件就能很方便地将网络摄像头转换为本地摄像头。获取图像流程图和程序框图分别如图5,图6所示。
3.2 通信协议包定义
由于汽车防溜车模拟测试系统的下位机与上位机之间需要传送多种数据,单字符通信方式干扰较大,所以采用数据包格式传送指令[9?10],包头和包尾用0xFF,无校验位。在下行数据协议中,类型位0x00表示向小车发送控制指令,不同的命令位代表不同的控制指令,数据位代表油门的大小。上行数据协议中,不同的类型位代表小车的各种状态数据,角度值用十六进制数表示,数据位1代表角度值的高8位,数据位2代表角度值的低8位。转速的数据位1中0x00代表车轮反转,0x01代表车轮正转,数据位2表示速度值。
3.3 控制方式设计
为了使小车模拟测试系统更加直观、控制小车更加简易便捷,模拟测试系统添加了按键控制小车的功能:按W小车前进,按空格小车停止,按S小车后退,按A小车左转,按D小车右转。
3.4 前面板设计
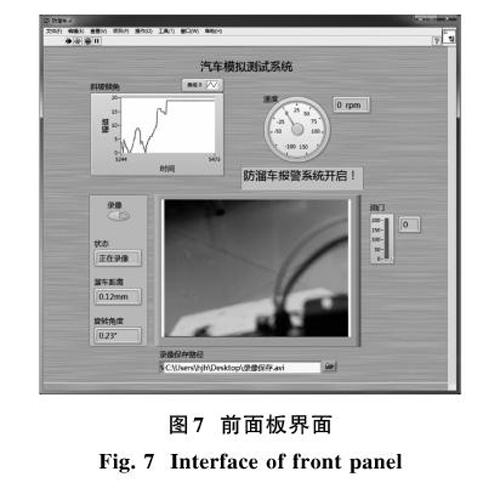
由LabVIEW开发的汽车模拟测试系统的前面板如图7所示,可显示坡度、速度及图像等信息。在系统运行过程中操作方便、简单,提高了测试效率。
3.5 溜车条件判断
由于实际情况中小车会在凹凸不平的路面上行驶,难免出现抖动,为了避免误判,设置角度阈值为10°。在没有动力提供给车子的前提下,车身方向上的倾角达到10°以上,并且车轮在此方向上有转动的趋势,则判断为溜车。
4 系统测试
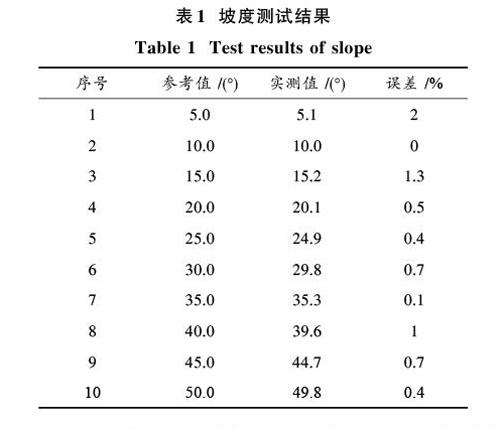
基于LabVIEW的汽车防溜车模拟测试系统上电运行后,通过上位机控制智能小车爬行至不同的坡度上进行测试。表1为坡度测试结果,可以看出测量误差较小,坡度信息正确。同时,上位机能及时收到传感器发回的坡度数据和车轮的转数,以及摄像头获取的图像等信息,在LabVIEW界面上实时显示。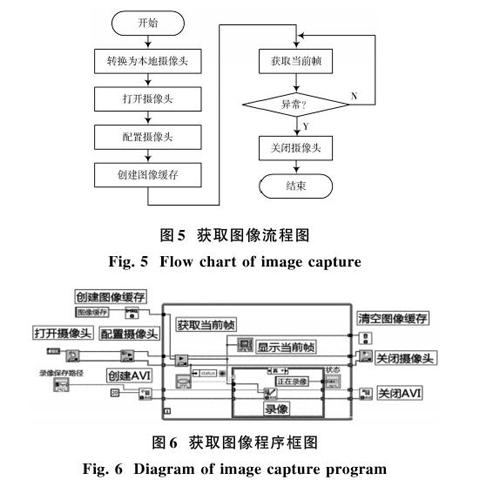
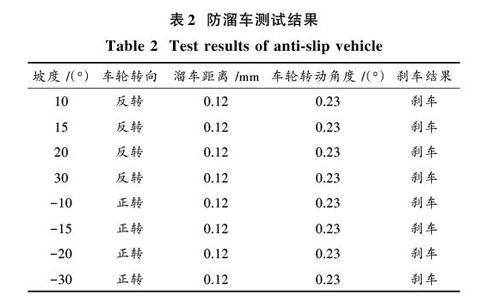
防溜车测试结果如表2所示,当达到溜车条件时,小车能迅速进行刹车,停在斜坡上不再移动。经多次测试检验,小车溜车距离约为0.12 mm,对应车轮转动的平均角度约为0.23°,能在较短时间和距离内自动刹车,说明防溜车系统性能稳定,测试成功率高。
5 结 论
本文针对汽车防溜车的安全性和可靠性要求,建立基于LabVIEW的汽车防溜车模拟测试系统,实验测试结果表明,在未提供动力时,小车上坡时车轮反转或下坡时车轮正转均能自动刹车,且测试软件具有良好的人机交互性,可视化程度较高,能够胜任数据采集、处理、显示等任务。该防溜车模拟测试系统能为汽车的安全辅助测试提供有利参考,降低测试成本,提高测试效率,具有一定的应用价值。
注:本文通讯作者为陈辉金。
参考文献
[1] 陈颖峰,王玉红,王蕾.基于ARM和LabVIEW的网络数据采集测试系统设计[J].现代电子技术,2016,39(13):88?92.
CHEN Yingfeng, WANG Yuhong, WANG Lei. Design of network data acquisition and test system based on ARM and LabVIEW [J]. Modern electronics technique, 2016, 39(13): 88?92.
[2] 韩承伟,邱浩,贺萍.轮毂电机再生制动LabVIEW测试平台设计[J].计算机测量与控制,2015,23(6):1919?1921.
HAN Chengwei, QIU Hao, HE Ping. A design of regenerative braking test platform of hub?motor based on LabVIEW [J]. Computer measurement & control, 2015, 23(6): 1919?1921.
[3] 吴青林,周天宏.基于移动终端和LabVIEW的智能家居控制系统研究[J].现代电子技术,2016,39(2):130?132.
WU Qinglin, ZHOU Tianhong. Research on smart home control system based on mobile terminal and LabVIEW [J]. Modern electronics technique, 2016, 39(2): 130?132.
[4] 文垚,陈晶田.基于LabVIEW的虚拟3D驾驶仿真系统[J].实验室研究与探索,2016,35(11):103?106.
WEN Yao, CHEN Jingtian. Application of LabVIEW in a virtual 3D driving simulation system [J]. Research and exploration in laboratory, 2016, 35(11): 103?106.
[5] 向诚,谢峰粹.基于WiFi和Android的智能探测车设计[J].电子技术应用,2013,39(12):82?85.
XIANG Cheng, XIE Fengcui. Design of intelligent probe vehicle based on WiFi & Andorid [J]. Application of electronic technique, 2013, 39(12): 82?85.
[6] 杜丽霞,李菲.基于LabVIEW的机器视觉实现:轨距检测算法[J].实验室研究与探索,2015,34(2):122?124.
DU Lixia, LI Fei. Track gauge point inspection algorithm based on computer vision [J]. Research and exploration in laboratory, 2015, 34(2): 122?124.
[7] 金雨,李红莉.基于LabVIEW和USB摄像头的图像采集与处理[J].现代电子技术,2015,38(20):67?70.
JIN Yu, LI Hongli. Image acquisition and processing based on LabVIEW and USB camera [J]. Modern electronics technique, 2015, 38(20): 67?70.
[8] 阚钰淇,张宁,徐熙平.LabVIEW平台下USB图像采集与处理系统设计[J].工业仪表与自动化装置,2013(6):80?82.
KAN Yuqi, ZHANG Ning, XU Xiping. Image acquisition and processing system design based on LabVIEW and USB camera [J]. Industrial instrumentation & automation, 2013(6): 80?82.
[9] 张剑龙,王耀青,杨柳.基于3G和WiFi的无线视频监控系统的设计[J].电视技术,2015,39(16):57?60.
ZHANG Jianlong, WANG Yaoqing, YANG Liu. Design of wireless video monitoring system based on 3G and WiFi [J]. Video engineering, 2015, 39(16): 57?60.
[10] 姚娟,张志杰,李丽芳.基于LabVIEW和TCP的数据采集系统设计与实现[J].电子技术应用,2012,38(7):72?74.
YAO Juan, ZHANG Zhijie, LI Lifang. Design and implementation of data acquisition system based on LabVIEW and TCP [J]. Application of electronic technique, 2012, 38(7): 72?74.
猜你喜欢
东方教育(2016年9期)2017-01-17
计算机时代(2016年12期)2017-01-14
科技创新与应用(2016年34期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
中国新通信(2016年16期)2016-10-18
科技视界(2015年25期)2015-09-01
