GNSS多系统动态精密单点定位性能分析
2018-06-13 10:36潘宇明丁乐乐孟凡效王震
全球定位系统 2018年2期
潘宇明,丁乐乐,孟凡效,王震
(天津市勘察院,天津 300191)
0 引 言
随着中国北斗卫星导航系统和欧盟Galileo卫星导航系统的建设发展,以及GLONASS现代化,过去采用GPS单系统进行导航定位的技术已经逐渐过渡到了GNSS(Global Navigation Satellite System)多系统导航定位阶段[1],GNSS各系统兼容、互操作与数据融合成为GNSS导航定位领域主要发展趋势之一[2]。GNSS多系统较单系统数据冗余特性好,可显著改善有遮蔽或者干扰情况下的导航定位效果,且拥有更好的完好性验证,通过系统间比对能有效检验授时和定位精度[3]。多系统的发展可从根本上改变对某一系统的过分依赖,尤其是在战争等特殊环境下。精密单点定位(PPP)技术具有作业机动灵活、无需基准台站、测站间不受距离限制,且观测值不会因差分操作减少等优点[4]。使用单台接收机即可直接获得高精度的ITRF框架的三维地心坐标,大大节约了用户成本,提高了生产效率[5]。近年来,PPP技术逐渐发展成为卫星导航定位技术领域的热点研究方向之一,正蓬勃发展,显现出了广阔的应用前景。以IGS组织推动的多模GNSS实验跟踪网(MGEX)为契机,PPP进一步朝着多系统的方向发展。
近年来,国内外学者对多系统融合技术进行诸多研究并取得成果。Montenbruck介绍MGEX项目是跟踪、整理和分析所有可用的GNSS信号[6]。李盼等在2014年采用GPS、GLONASS和北斗三个系统进行PPP定位[7],李星星于2015年开展了基于非差非组合模型的四系统集成的PPP研究,结果表明四系统组合可以明显改善可见卫星数量、空间几何构型,提高定位精度和收敛速度,提高导航和定位的连续性和可靠性,在观测环境差时提高更明显,并将多系统组合方法应用于水汽研究[8-9]。
本文在研究多系统融合PPP模型及其相关处理策略的基础上,基于IGS MGEX跟踪站观测数据和机载动态数据,对单系统、双系统组合、多系统融合PPP的动态定位精度、收敛速度进行比较分析,并在不同高度角阈值下对动态PPP进行仿真。
1 非差精密单点定位原理
接收机r所接收到的来自卫星s的伪距和相位观测值可表述为[4-5]
(1)
(2)
式中:上标G为某一卫星系统(GPS/GLONASS/

为了消除式(1)、式(2)中电离层延迟误差的影响,一种方法是采用两个频率上的观测值形成无电离层组合模型:
(3)
(4)
(5)
(6)

本文兼顾定位精度和计算效率,采用经验的三角函数高度角定权,根据参考文献[8]的研究结果,GPS和Galileo信号质量较好,使其伪距权较GLONASS和BDS的大一倍,对于相位观测值采取四个系统等权方法。这种方法能较好地描述多系统观测值之间的权比,而且不用迭代,提高了运算效率。对于伪距和相位观测值权比问题,传统的PPP随机模型一般将其设置为1∶100,本文根据伪距和相位的噪声比值采用自适应的伪距和相位权比。针对BDS系统不同星座,因为GEO卫星轨道精度较差,在实验时适当提高MEO和IGSO卫星信号的权比,降低GEO卫星信号的权比。
采用扩展卡尔曼滤波进行参数估计,待估参数为测站坐标、接收机钟差、天顶对流层湿延迟、各个卫星的模糊度参数等[11]。对流层湿延迟的随机模型采用随机游走模型,测站坐标随机模型在动态定位时采用白噪声模型,接收机钟差采用白噪声模型,模糊度参数在连续弧段内作为常数,发生周跳时采用白噪声模型。
卫星轨道和钟差采用GFZ的MGEX精密轨道和精密钟差。卫星端和接收机端相位中心偏差(PCO)和天线相位中心变化(PCV)采用IGS发布的产品进行改正。目前IGS只提供BDS和GALILEO卫星端PCO,尚未提供接收机端的PCO和PCV,因此在处理BDS和GALILEO系统时只进行了卫星端PCO改正[11]。同时,也考虑了极移、固体潮、海洋潮等改正。
2 实验结果分析
2.1 静态模拟动态PPP实验
本文选取了7个MGEX测站从2016年2月14日至2016年2月20日7天的数据,观测值采样率是30 s,利用自主研发的PPP解算程序进行模拟动态PPP解算。这7个测站的基本信息和分布情况如表1所示。采用精密钟差中的测站坐标作为参考值,可以准确计算出各历元坐标估值的偏差。本文采用位置偏差均方差(RMS)来表征定位精度,并统计各测站定位偏差的水平分量优于0.1 m且垂直分量优于0.2 m时所需要的观测时长,作为收敛时间指标。
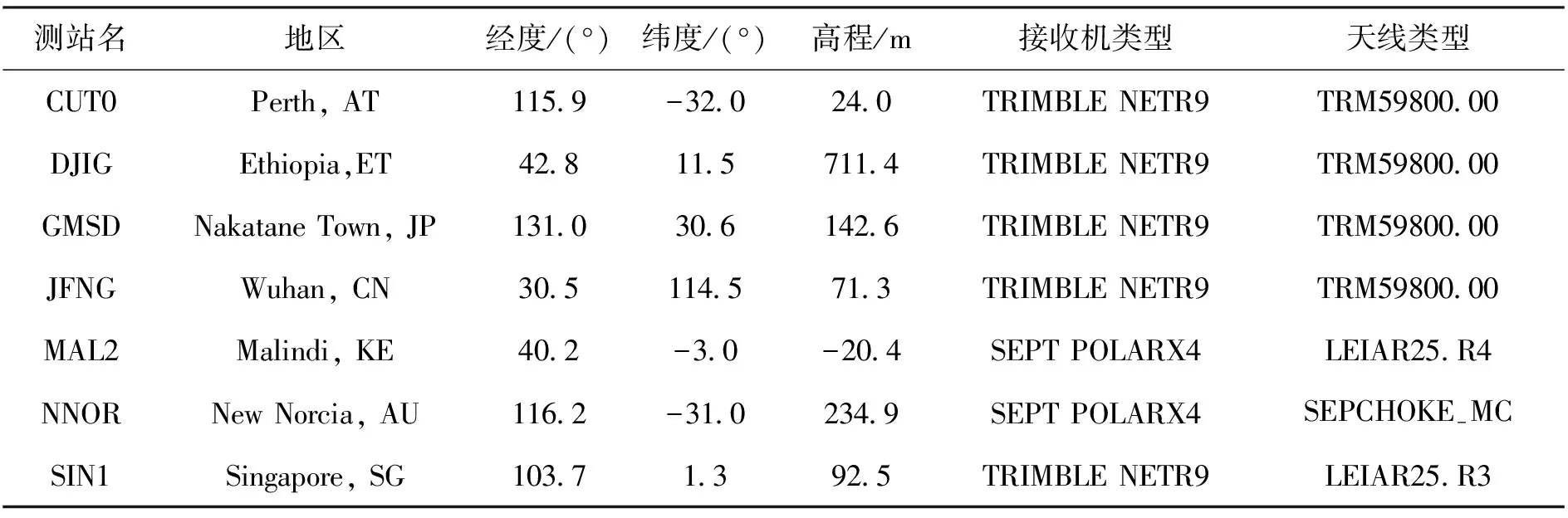
表1 实验选取MGEX站基本信息
图1示出了CUT0站采用不同系统的动态PPP定位结果,即单天解RMS的均值,其中左图表示BDS、GLONASS和GPS单系统PPP定位结果,从图中可以看出BDS单系统PPP定位精度最低,在水平方向能达到0.2~0.4 m,垂直方向RMS在0.5 m以上,造成这种精度较差的原因有: 1) BDS卫星轨道的精度较低;2) BDS信号噪声较大;3) BDS卫星内部多路径等原因造成的伪距偏差未改正;GPS结果精度最高,平均RMS值在5 cm以内。右图分别表示GPS+BDS、GPS+GLONASS双系统PPP和四系统PPP的组合定位结果,可见GPS+BDS双系统组合定位结果RMS均值约为东方向1.5 cm,北方向1 cm,上方向2.5 cm,GPS+GLONASS精度稍好于GPS+BDS组合,其在E、N、U三个方向的精度约为1.3 cm、0.8 cm和2.3 cm,四系统组合动态PPP的精度最高,三个方向RMS均值约为0.7 cm、0.6 cm和1.7 cm.由此可以得出结论,多系统组合的动态PPP定位精度要高于单系统和双系统PPP.
为了显示四系统组合PPP的优越性,本文分析了不同截止高度角情况下的单系统和多系统动态PPP精度,图2示出了CUT0站(DOY047)在不同截止高度角下的PPP动态定位偏差序列,浅色的线条表示GPS单系统PPP结果,深色的线条表示四系统组合PPP结果,从左至右依次是截止高度角10°、20°和30°.发现当截止高度角增大时,GPS单系统PPP的精度和可靠性显著降低,当截止高度角增大到30°时,GPS单系统PPP将不能提供连续的精密定位结果,得到的坐标可靠性和精度降低。但是多系统组合PPP的定位精度却没有随着高度角增大而明显减小,即使截止高度角增大到30°,多系统PPP在水平方向的精度依然能达到一定要求,提供连续的精密定位结果。多系统组合PPP精度虽然会随着截止高度角增大而在一定程度上逐渐降低,但是相较于单系统PPP精度依然很高。
图3示出了其中7个测站采用不同系统的动态PPP平均收敛时间。从图中可以看出BDS单系统动态PPP收敛时间最长,一般需要4 h以上的收敛时间,明显长于GPS PPP和GLONASS PPP.且对比2.1节中的静态PPP收敛时间,可以看出在相同条件下,动态PPP收敛时间明显长于静态PPP,这是由于动态PPP待估参数更多,模型强度比静态PPP要弱的原因所致。
从图3中还可以看出,对大多数测站,GPS+GLONASS PPP动态解平均收敛时间在20 min左右;GPS+BDS平均收敛时间约为30 min.所有测站,GPS+GLONASS 动态PPP收敛时间要短于GPS+BDS 动态PPP.所有测站四系统动态PPP的收敛时间不超过40 min;大部分测站其收敛时间约为10~20 min左右。可见四系统组合PPP动态模型的收敛时间最短。
2.2 机载动态PPP实验
为了更为全面地评估多系统PPP程序的动态定位性能和精度,本文采用机载数据进行实时动态定位的实验,该机载数据算例开始时间为2015年4月25日21点22分41秒,终止于2015年4月26日3点46分27秒,时长约为5 h,采样率为1 Hz,接收机采用NovAtel GPSCard板卡,同时接收GPS、GLONASS、Galileo和BDS双频的数据。飞机的飞行轨迹如图4所示。
对上述机载数据分别进行单系统、双系统和多系统动态PPP解算,以GrafMov动态基线处理结果为参考坐标。GrafMov是加拿大专业GPS软件公司开发的GPS/GLONASS事后处理软件包,它包括GPS动态和静态数据处理软件,可以非常方便地选择组合方式进行数据处理,得到厘米级的定位精度,同时增加了动态基线的处理功能。本文将已知坐标的地面基站作为参考站,采用GrafMov获得地面基站和机载接收机基线坐标,继而获得机载接收机坐标,并将最终的坐标偏差转换到E、N、U方向,对偏差进行精度统计。图5示出了该算例计算结果,图6示出了采用不同系统组合的动态PPP精度。从上面两幅图可以看出,在单系统PPP中,GPS精度最高,GLONASS次之,都能达到分米级,而BDS单系统PPP精度不如GPS和GLONASS,只能达到米级的精度。双系统PPP精度较单系统PPP都有提高,其中GPS+GLONASS双系统PPP的精度优于GPS+BDS双系统PPP的精度。GPS+GLONASS+BDS+GALILEO组合PPP的精度最高,优于其他双系统和单系统组合PPP的精度,5 h的定位精度能达到0.1 m左右。
3 结束语
本文利用MGEX 7个测站一周的数据分别进行单系统和多系统的动态模拟PPP解算,将得到的结果坐标与测站坐标参考值相减,得到坐标偏差序列。结果表明:动态实验结果显示GPS单系统PPP精度的平面定位精度为3~5 cm,高程方向的精度优于1 dm,GLONASS次之,BDS精度最差,在水平方向能达到0.2~0.4 m,垂直方向RMS在0.5 m以上,收敛到0.1 m所需要的时间分别为:GPS 30 min左右、GLONASS 50 min左右、BDS 240 min以上。组合PPP精度有很大提高,GPS+BDS组合PPP精度略高于GPS单系统PPP精度,但会显著提高其收敛时间,GPS+GLONASS结果略好于GPS+BDS组合。GPS+GLONASS+GALILEO+BDS四系统组合PPP精度最高,静态结果E、N、U三个方向平均偏差约为0.5 cm、0.4 cm和0.9 cm,收敛时间为不超过10 min;动态四系统三个方向平均偏差约为0.7 cm、0.6 cm和1.7 cm,收敛时间为15 min左右。并且多系统PPP在截止高度角增大时,依然有充足的卫星数量,当截止高度角达到30°时,依然能达到cm级定位精度。对机载动态数据进行PPP解算结果显示,四系统组合解算的结果与GrafMov的结果符合得最好,优于其他双系统和单系统组合PPP的精度。
[1] 杨元喜,李金龙,徐君毅,等. 中国北斗卫星导航系统对全球 PNT 用户的贡献[J]. 科学通报, 2011, 56(21): 1734-1740.
[2] 韩涛. 卫星导航系统互操作算法研究[D]. 北京,中国科学院大学, 2016.
[3] 李盼. GNSS精密单点定位模糊度快速固定技术和方法研究[D]. 武汉:武汉大学, 2016.
[4] ZUMBERGE J F, HEFLIN M B,etal. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of Geophysical Research: Solid Earth, 1997, 102(B3): 5005-5017.
[5] KOUBA J, HEROUX P. Precise point positioning using IGS orbit and clock products[J]. GPS Solutions, 2001, 5(2): 12-28.
[6] MONTENBRUCK O, STEIGENBERGER P,etal. IGS-MGEX: preparing the ground for multi-constellation GNSS science[J]. Inside GNSS, 2014, 9(1): 42-49.
[7] LI P, ZHANG X. Modeling and performance analysis of GPS/GLONASS/BDS Precise Point Positioning[C]//China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume III. Springer Berlin Heidelberg, 2014:251-263.
[8] LI X X, ZHANG X H, REN X D.etal. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BDS[J]. Scientific Reports, 2015, 5,8328 Doi:10.1038/srep08328.
[9] LI X X, ZUS F, LU C X.etal. Retrieving high-resolution tropospheric gradients from multiconstellation GNSS observations[J]. Geophysical Research Letters, 2015, 42(10): 4173-4181.
[10] 付青. 多卫星导航系统精密单点定位精度分析[J]. 全球定位系统, 2014, 39(6):42-46.
[11] 张守建, 王伟. 多系统融合精密单点定位性能分析[J]. 大地测量与地球动力学, 2017, 37(10):1065-1069.
[12] 郭敏. 精密星历类型对实时长距离差分动态定位的影响分析[J]. 全球定位系统, 2017, 42(5):49-52.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
测绘地理信息(2022年2期)2022-04-02
导航定位学报(2022年1期)2022-02-17
导航定位学报(2021年4期)2021-08-29
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
中国电气工程学报(2019年18期)2019-10-21
智富时代(2019年4期)2019-06-01