
汽车移动式太阳追踪系统的控制与实现
2018-06-14 11:52贾华,江飞
计算机与网络 2018年10期
贾 华,江 飞
(内蒙古科技大学,内蒙古包头014010)
0 引言
由于石油、天然气的过度开发和使用,以及汽车尾气的排放和工业污染等原因,导致雾霾天气越来越多,温室效应也越来越严重。太阳能作为当前最热门的新能源的一种,有着不可估量的发展优势和潜力。近年来,开发新型的可再生能源已经成为了能源研究领域的重点。目前,很多追踪太阳采用的都是将太阳能电池板固定安装在平台上面。为了能够适应不同平台的需要,移动式平台逐渐被重视,但是移动式平台追踪需要考虑动态追踪,在目标丢失后进行重新找回等因素。2010年Mousazadeh等[1]通过将太阳能电池板放在混合拖拉机上面进行实验,从而得出使用跟踪系统比固定模式多获得35%左右的能量[2]。因此,设计和开发精确的太阳追踪系统,具有非常广阔的应用前景[3]。
1 太阳追踪原理
1.1 光电追踪的原理
太阳在一天中的运动轨迹可以分为水平方向和俯仰方向,光电传感器布置如图1所示[4]。当太阳光垂直照射到太阳能电池板时,遮光器3形成的阴影会完全遮住光电传感器4,遮光器5形成的阴影会完全遮住光电传感器6。因此,如果光电传感器4和光电传感器6完全被遮住时,就是太阳光垂直照射到太阳能电池板上面。
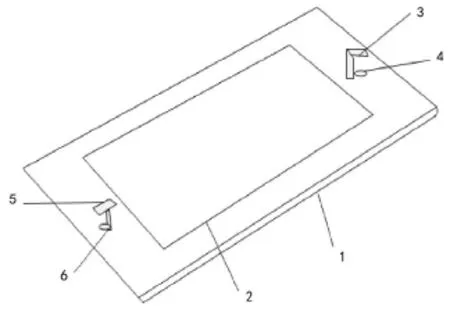
图1 光电传感器布置
假如遮光器3在太阳光照射装置2,没有完全遮挡住光电传感器4时,表明太阳光在水平方向上没有垂直照射到装置2,控制器会接收到来自光电传感器4的信号,通过控制水平方向上的步进电机的驱动模块来控制水平方向上的步进电机转动,直到遮光器件3完全遮挡住光电传感器4,使得装置2在水平方向上面达到被太阳光垂直照射。假如遮光器5在没有完全遮挡住光电传感器6时,表明太阳光在垂直方向上面没有垂直照射到装置2,单片机会接收到来自光电传感器6的信号,通过控制步进电机驱动模块来控制垂直方向上的步进电机转动,直到遮光器件5完全遮住光电传感器6,控制器控制垂直方向上的步进电机停止转动,使装置2在垂直方向上面达到被太阳光垂直照射。当装置2中的遮光器3被阳光照射完全遮住光电传感器4时,遮光器5被阳光照射完全遮住光电传感器6时,保护太阳能板装置1上面的太阳能电池板2此时在水平方向和垂直方向都达到太阳直射。
1.2 视日轨迹追踪
地球在自转的同时,还要围绕着太阳进行公转,如果要想通过GPS信息实现视日运动轨迹[5]进行跟踪太阳,首先要了解太阳的运行轨迹和规律,才能进行追踪。太阳高度角和方位角的计算公式如下:

式中,为高度角; 为当地纬度; 为赤纬角; 为时角。
赤纬角 为地球赤道平面与太阳和球中心连线的夹角,[6]公式为:

式中,为积日。
太阳的时角,其中 为被测地点的真太阳时,真太阳=。
式中, 为当地经度;为时差,

因此,太阳方位角 计算公式为:
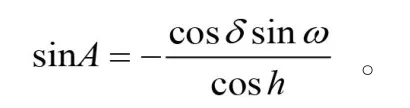
利用上述公式,根据观测点的经度、纬度、日期及时间等信息,经过计算,就可以得到该点任何时刻的赤纬角、时角、真太阳时和时差,然后通过这些数据就可以计算出该地区的太阳高度角和方位角。
2 系统设计
2.1 系统软件设计
目前太阳能电池跟踪太阳的方法主要有光电检测跟踪和视日轨迹跟踪2种,系统的软件跟踪流程如图2所示。
整个控制系统利用GPS获取的时间信息判断白天和黑夜,光电检测判断天气是否晴朗,从而判断是光电追踪还是视日轨迹追踪。刚开始先对系统进行初始化,接下来GPS会获取当地的日期、时间、经度和纬度等信息,通过时间信息实时判断是白天还是黑夜。如果控制系统判断是黑夜,系统则首先会进入低功耗状态,以便减少系统的损耗。如果判断是白天,控制系统通过光电传感器来判断天气情况;若是晴天,则进入光电检测追踪,得到太阳的大概方位,进行追踪;若是阴天,则通过GPS得到经纬度和时间信息,传给单片机,通过视日轨迹算法进行视日轨迹精确追踪。
太阳的角度变化一般在垂直方向和水平方向同时变化,为了能够精确地追踪太阳,一般在追踪的时候,先进行垂直方向追踪,等垂直方向追踪好之后,在进行水平方向的调整。
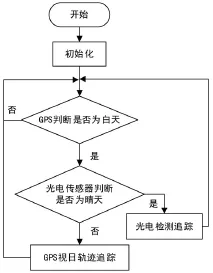
图2 系统的软件跟踪流程
2.2 硬件设计
系统硬件结构如图3所示,选用的是STM32系列高性能32位处理器STM32 F103ZET6,该处理器具有低功耗和多种省电工作模式,并且输出接口比较多,满足设计的要求。
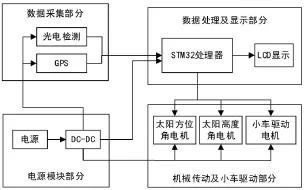
图3 硬件设计
该部分由数据采集、数据处理及显示、机械传动及小车驱动和电源模块4部分组成。数据采集部分负责采集经纬度、时间及天气等信息,将信息传送给单片机,由数据处理及显示部分对信息进行处理,来驱动方位角电机和高度角电机,达到追踪太阳的目的,并且进行数据显示,电源部分负责给整个系统供电。
系统采用GPS模块来获取当地的经度、纬度、日期和时间等信息,通过视日轨迹跟踪算法算出实时的太阳高度角和方位角,将得到的角度信息换算成步进电机需要转动的步数,从而带动太阳能板转动,精度可以达到1°左右。采用MPU6050传感器测量太阳能板实时的水平角度信息和俯仰角度信息,将得到的信息进行处理,处理的信息与视日轨迹跟踪算法算出的角度信息进行比较判断,如果二者角度信息相等,则表明太阳能电池板已经转动到系统所要求的位置;如果二者角度信息不相等,则表明太阳能电池板没有达到要求转动的位置。通过计算出二者之间的角度差,将角度差换算成步进电机转动方向的角度,来驱动步进电机转动相应的角度,从而使太阳能电池板转动到要求的位置。将利用视日轨迹算法算出来的高度角和方位角信息通过LCD1602显示出来,以便进行观测。
通过蓝牙对小车进行控制,利用PWM对小车的速度进行控制。通过控制电机的通电方向来实现对小车的方向进行控制,从而模拟汽车,通过蓝牙控制小车的转向,来观测移动式太阳能板应速度。
3 系统测试
通过在单片机上面编写算法,计算出内蒙古包头(东经109.51°,北纬 40.41°)2017年 10月 10日 8:00~17:00,每隔一小时的高度角和方位角,计算结果如表1所示。本次采用的日梭万年历的值为标准值,将单片机计算的的结果,用LCD显示出来。
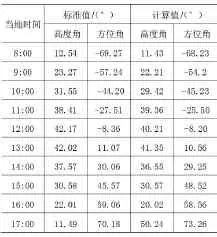
表1 标准值和计算值对比
4 结束语
通过分析太阳的运动规律,将传统的光电追踪和视日轨迹追踪2种方式进行相结合,通过GPS模块获取的时间信息进行判断白天和黑夜,进而再通过光电传感器再判断天气是否晴朗,从得到的信息来判断是执行光电追踪还是视日轨迹追踪,并且先进行俯仰方向的追踪,再进行水平方向的追踪。使太阳能电池板的输出功率最大化。
由实验结果分析可知,移动式追踪相比传统式的追踪,能够更加有效地利用太阳能,此方式对移动式追踪具有一定的意义。
[1]Mousazadeh H,Keyhani A,Javadi A,et al.Design,Construction and Evaluatio of A Sun-tracking System on Mobile Structure[J].Journal of Solar Energy Engineering,2011,133(1):169-175.
[2]罗伟平.基于PLC的太阳能电池板自动跟踪系统的研究[J].计算机技术与应用,2009(9):138-140.
[3]宁泽,高继春.发展太阳能光伏发电的意义及前景[J].西北轻工业学院学报,2002,2(1):82-84.
[4]李宗涛,李志刚,于存贵,等.基于单片机的太阳追踪系统的设计[J].电子设计工程,2014,1(2):188-190.
[5]袁信,张洵.太阳方位算法的研究和设计[J].天津航海,2011(3):1-4.
[6]贺萧雷,于贺军.太阳方位角的公式求解及其应用[J].太阳能学报,2008,29(1):69-72.
猜你喜欢
结构工程师(2022年2期)2022-07-15
铝加工(2021年5期)2021-12-02
军事文摘(2021年18期)2021-12-02
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
电子制作(2018年12期)2018-08-01
现代装饰(2018年5期)2018-05-26
知识就是力量(2017年12期)2018-01-15
