一类滞环非线性时滞系统的神经网络动态面控制方法
2018-06-19 04:22唐晓博
东北电力大学学报 2018年3期
唐晓博
(国网哈尔滨供电公司,黑龙江哈尔滨150010)
随着人们对智能材料关注的不断提高,新型功能材料得到了广泛的应用和快速的发展.目前,比较常见的新型功能材料有磁致伸缩材料、形状记忆合金材料、压电陶瓷材料等.滞环特性作为智能材料中的一种固有非线性特性严重影响着系统的稳定性.目前,针对具有滞环输入的非线性系统归纳起来,补偿方式主要有两种,第一种是建立滞环逆,这种方法的优点是可以根据滞环模型的算子建立逆算子,再级联到控制系统中,精确的补偿滞环带来的影响;缺点是由于滞环非线性系统的复杂性导致滞环模型的建立困难,在此基础上,实现滞环模型的求逆运算就更加困难.因此,第二种方式即将滞环与研究对象看作一个整体,通过自适应控制方法设计控制器对系统进行控制的优势就突显出来.文献[1]对于一类含有未知PI滞环模型和未知扰动的严反馈系统,通过动态面方法的设计,不但实现了对于系统控制律的设计,同时在反步过程中实现对滞环的抵消,通过引入初始化技术,保证了系统跟踪误差的L"性能.文献[2]针对带有传统的PI模型的滞环非线性系统,采用反推与变结构相结合的自适应控制方法.针对同时含有滞环和时滞的非线性系统,文献[3]应用变结构的自适应控制方法补偿了系统中的磁滞影响,与此同时,建立Lyapunov-Krasovskii泛函进行稳定性分析.在众多的自适应控制方法中,动态面的控制方法在干扰不确定的非线性系统的控制器设计中优势明显,另外随着智能算法的研究的深入,将动态面的控制方法与智能算法相结合可以扩大其应用范围.但是采用动态面算法来补偿滞环带来的影响研究的并不多,针对同时具有滞环和时滞的非线性系统的研究更是少之又少.本文针对状态变量全部可测的一类滞环非线性时滞系统首先建立带有PI滞环模型的非线性系统的前期状态方程;其次,设计基于RBF神经网络估计的动态面控制方法,继而,进行稳定性分析;最后,通过对二阶非线性系统的仿真,证明了方案的可行性.
1 控制系统描述
1.1 系统模型
考虑如下非线性系统:

其中:∈ Ri是状态变量且状态信息已知;是未知光滑函数;fi(·)是未知光滑时滞函数;是时滞状态变量,其中 τi是未知时滞常数;di(t)表示未知干扰项;y∈R是输出量;ω∈R表示滞环模型输出,可以表示成ω(t)=∏(u(t)),u为滞环输入.
1.2 滞环模型
本文中选用的描述滞环现象的模型为PI模型[4],它常常用于控制器的设计.其数学定义为:

其中:λ是一个未知正常数,它的取值与密度函数有关;Fr是Stop算子,p(r)≥0且是Stop算子的密度函数,通常由实验得到.
2 相关假设及引理
假设3 τi,i=1,…,n属于一个已知的紧集[0,τM].τM> 0是一个已知常数,表示 τi的上确界.
假设4输出轨迹yr光滑且yr(0)待设计,当t≥0时,属于一个已知紧集.

其中:dimax表示正常数.
引理1[5]设f(ξ)是一个在紧集Ωξ∈Rn上的光滑函数,当τ∈[0,τM]为一个紧集时,通过ξ=(ξ(t),ξ(t- τ)) 的选取,使得ξ=(ξ(t),ξ(t- τ)) 一致连续.那么,对于任意给定的δ0> 0,存在[0,τM]上的有限划分0≤t1<t2<…tm<τM,对于点τ-∈{t1,…,tm},满足
假设1 存在已知常数pmax使得p(r)<pmax,保证滞环模型有界.
假设2 对于干扰项di(t),i=1,…,n满足

注1 假设1~假设3来自文献[6],对于含有不确定项的非线性系统的控制器设计,需将未知项用已知的连续函数来界定.
注2 假设4来自文献[7],为动态面设计方法中必需假设.
3 神经网络动态面控制方法设计
下面将应用动态面的控制算法设计控制律,设计过程共分为n步,实际的控制律将在最后一步给出.将PI模型代入到系统模型中有

记β=λgn(xn).在上述模型中,gi(·),i=1,…,n-1是已知的;另外,假设存在着常数gmin,gmax,βmin和βmax,使和β满足条件
第1步:定义第1个误差面

其中:yr是待设计的跟踪输出轨迹.考虑如下的二次型函数

根据引理 1,存在点 τi/i,…,τn/n,∈ {t1,…,tm},其中 t1,…,tm满足 0 ≤ t1< t2< …tm< τM有

其中:是一个给定的正常量.结合下列不等式

并对式(7)求导,有

用神经网络估计未知项,有

其中:
假定神经网络的估计误差

设计虚拟控制律:

令x2d经过一个一阶低通滤波器,有

其中:ζ2是滤波器的时间常数.
第i(2≤i≤n-1)步:与第1步方法类似,定义第i个面的误差

考虑如下的二次型函数

求其导数,有

设计虚拟控制律:

令xi+1d经过一个一阶低通滤波器得到zi+1,有

其中:ζi+1是滤波器的时间常数.
第n步:定义第n个面的误差

考虑如下二次型函数:

其中:γθn和 γpr是待设计参数.记的估计值.
求其导数,有


设计控制律如下:

调参律如下:


其中:pλmax=Pmax/λ,γθ,ηθ,γpr,ηpr为待设计参数.
4 稳定性分析
由于采用了动态面的控制算法,大大简化了控制律的设计过程,但是由于引入新的低通滤波器误差项,增加了稳定性分析的难度.
定义通过一阶低通滤波器的误差y2和yi+1,i=2,…,n-1如下:
分别求y2和yi+1对于时间的微分,有

其中:ζi+1,i=1,…,n-1为低通滤波器的时间常数.对于任意的i=1,…,n-1,Bi+1为一个连续函数.
定义关于控制器设计每一步的面误差、滤波器误差的Lyapunov函数:

其中:yi+1为滤波器误差.
求式(34)对时间的导数可以得到

根据调参律式(27)可以得到

根据调参律式(28)可以得到

则

定义如下的紧集

由紧集的性质可知Ω1×Ω2也是紧集,Bi+1在Ω1×Ω2上存在量大值,记为Mi+1,i=1,2,…,n+1.
则如下不等式成立

其中:μ为任意正常数.
则可以得到


令
其中:m为待设计常数,且满足


将公式(43)~公式(45)代入公式(42),可以得到

解式(46)的微分不等式可以得到

因此,当t→"时,有

由上述证明过程可知,当V=p时,V·≤0,即V(t)≤p是一个不变集,对于任意的t≥0,V(t)≤p成立.当t→"时,V一致有界.这样,闭环系统内的所有信号一致有界.由于m的值可以任意大,因此系统的跟踪误差可以任意小.
5 算例仿真
针对如下二阶非线性系统:

控制的目标是使经控制器的系统输出x1跟踪期望输出yr,其中yr=sin(2.5x).在上述系统中g1(x1)=2,g2(x2)=2,d1=0.1sin(t) 且d2=0.1cos(t)3x1x2(τ2(t)),滞环模型中的参数为 p(r)=0.5e-0.00105r2,时延项 τ1(t)=t- 1,τ2(t)=t- 0.5.仿真中,神经网络的输入向量 ξ1=(x1,S1) ∈ Ωξ,ξ2=(x1,x2,S2) ∈ Ωξ; 神经网络的高斯基函数为 ψ(ξi)=基函数ψ(ξ1) 和基函数ψ(ξ2) 分别选择81个和161个中心点,ζj均匀分布在[- 4,4]×[- 4,4]×[- 4,4]上,基宽ηj=1;各个参数的选取为α1=α2=3,k1=8,k2=2,γθ=2,ηθ=0.5,γpr=3 仿真初始状态选为 x1(0)=- 0.1,x2(0)=0.1.
图1显示了系统输出x1对于期望输出yr的跟踪情况,其中,黑色实线表示系统期望输出yr=sin(2.5t);红色虚线表示系统的输出.从图1可以清楚的看到,随着时间的递增,所设计的控制器可以使系统输出x1对期望输出yr具有良好的跟踪效果.图2显示了跟踪误差的变化情况,从图2中可以看出,本控制方案保证了跟踪误差收敛在某一邻域内,这符合动态面方法将跟踪误差收敛的某一个小邻域内的特点.图3和图4为RBF权值向量估计值.

图1 系统输出x1与期望输出yr
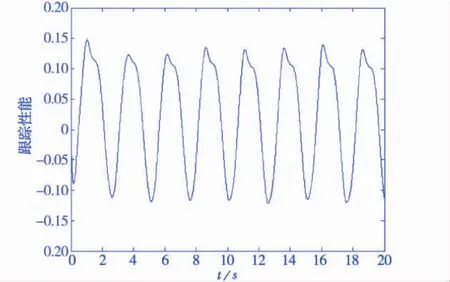
图2 跟踪误差/第1个面误差

图3 RBF权值向量估计

图4 RBF权值向量估计
6 结束语
本文以状态变量全部可测的一类滞环非线性时滞系统为研究对象,提出了一种基于RBF神经网络的动态面自适应控制方法.本方案将PI滞环模型代入到控制对象中,采用RBF神经网络的方法估计了未知时滞函数,避免了复杂的Krasovskii函数的建立,实现了在时滞未知情况下控制器的设计;动态面方法的使用大大简化了控制器的设计过程;稳定性分析表明了该方案可以保证闭环系统的稳定.仿真结果证明了此控制方法的有效性.
[1] Zhang X,Lin Y,Mao J.A Robust Adaptive Dynamic Surface Control for a Class of Nonlinear Systems with Unknown Prandtl-Ishilinskii Hysteresis[J].International Journal of Robust and Nonlinear Control,2011,21(13):1541-1561.
[2] Su C Y,Wang Q,Chen X,et al.Adaptive Variable Structure Control of a Class of Nonlinear Systems with Unknown Prandtl-Ishlinskii Hyteresis[J].IEEE Transactions of Automatic Control,2005,50(12):2067-2074.
[3] Ren B B,Ge SS,et al.Adaptive Neural Control for a Class of Nonlinear Systems with Uncertain Hyteresis Inputs and Time-Varying State Delays[J].IEEE Transactions on Neural Networks,2009,20(7):1148-1162.
[4] Visintin A..Differential Models of Hysteresis[M].New York:Springer-Verlag,1994.
[5] Zhang X Y,Su C Y,Lin Y,et al.Adaptive neural network dynamic surface control for a class of time-delay nonlinear systems with hysteresis inputs and dynamic uncertainties[J].IEEE Transactions on Neural Networks & Learning Systems,2015,26(11):2844-2860.
[6] S.Tong,Y.Li,and P.Shi,Fuzzy adaptive backstepping robust control for SISOnonlinear system with dynamic uncertainties[J].Inf.Sci.,2009,179(9):1319-1332.
[7] Krstic M,Kanellakopoulos I,Kokotovic P V.Nonlinear and adaptive control design[M].New York:Wiley Hill,1995.
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
数学物理学报(2020年5期)2020-11-26
电子制作(2019年19期)2019-11-23
环球慈善(2019年6期)2019-09-25
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
四川师范大学学报(自然科学版)(2015年2期)2015-02-28
海军航空大学学报(2015年4期)2015-02-27