一种用于康复机器人手指的软体致动器设计
2018-07-01 08:38管瑞阳谢能刚
安徽工业大学学报(自然科学版) 2018年4期
管瑞阳,王 璐,魏 伟,谢能刚
(1.安徽工业大学a.机械工程学院,b.管理科学与工程学院,安徽马鞍山243032;2.马鞍山市安工大智能装备技术研究院有限公司,安徽马鞍山243032)
手部康复机器人种类繁多[1],传统刚性结构的辅助设备往往体积较大且难以操作[2],而软体可穿戴的手部康复机器人可提供更安全的人机交互。软体可穿戴手部康复机器人的设计关键在于软体致动器,最常见的是利用流体压力来伸展或收缩的McKibben致动器[3],其是一种线性致动器,由内部橡胶套筒和外部双螺旋线编织的纤维约束层组成。2009年,日本冈山大学的Ogura等[4]研制了一种结构简单且变形大的“线虫执行器”,其利用正压和负压实现了像线虫一样在两个方向上的弯曲运动。2014年,哈佛大学的Panagiotis等[5-6]研发由高伸缩弹性材料和低伸缩约束材料黏合而成的气动软体致动器,充气时,低伸缩约束材料所在的底侧变形受到约束,而内部气动网络的主体弹性材料部分自由膨胀伸长,致使致动器产生弯曲运动。随后哈佛大学又研发出由不可伸展的纤维增强材料包裹弹性气囊构成的纤维增强型致动器[7-8],通过简单改变纤维的角度使制动器实现伸展、弯曲等动作。
国内学者如Wang等[9]研发的气动柔性机械手的手指致动器由主体弹性材料和一根高强度铁丝构成,充气时致动器一侧受到铁丝的约束而无法伸长,从而引起弯曲;Sun等[10]提出了一种新型蜂巢气动网络软体机器人;赵云伟等[11]设计了一种由多个气动轴向膨胀型人工肌肉并联组成的弯曲柔性关节致动器,人工肌肉由弹簧和橡胶管组成;肖宇[12]通过将软关节与刚性指骨相结合的方式,完成了柔性关节致动器的设计。现有的软体致动器存在造价昂贵、结构复杂、柔顺性不足等问题,在手部康复机器人上的应用十分有限。鉴于此,笔者设计一种基于空腔网络结构的新型软体致动器,并针对设计的软体致动器进行单指屈伸动作的仿真和实验。
1 单指软体致动器的结构设计
根据表1中正常男性成年人的手指测量数据[13],以食指数据为设计标准,致动器的总长度设计为133 mm(40 mm+46 mm+22 mm+25 mm),宽度为18 mm。外形采用半圆形设计,易与手指贴合。致动器的外部构型和内部结构设计如图1,2。

表1 正常男性成年人手指各关节长度及宽度,mmTab.1 Length and width of finger joints of normal male adult,mm
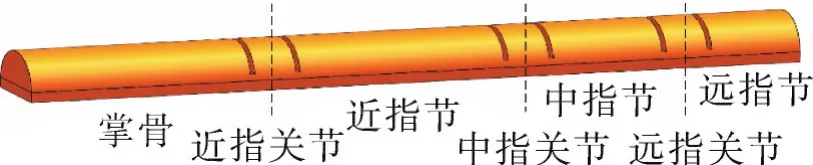
图1 致动器的外部构型及其对应的手指关节Fig.1 External structure of the actuator and its corresponding finger joint
致动器由弹性材料硅胶制成,在满足弯曲功能情况下,避免采用多种材料导致制作工艺复杂。致动器内部为密集分布的三角形和菱形的网络腔室,其中菱形腔室为充气腔室,三角形腔室为非充气腔室,两种形状的腔室间隔分布,且充气腔室之间有通道连接。向致动器通入压缩气体,底层厚度相对主体壁厚偏大,变形受到约束,伸缩量很小;主体部分关节处两个相对的充气腔室发生大变形膨胀,室壁相互挤压,使致动器在关节处发生弯曲,而非关节处的充气腔室间存在着非充气腔室的间隔,会吸收充气腔室的膨胀,使其几乎不发生弯曲。
2 仿真分析
为验证单指软体致动器结构设计的合理性,使用ABAQUS软件对其进行变形仿真分析。仿真分析时:材料定义为Ecoflex 30硅橡胶,其Yeoh能量密度模型[14]系数C10=0.11,C20=0.02,假设各向同性;网格划分选择四面体网格,自由划分,杂交单元类型;负载为作用在致动器充气腔室及其连通孔表面的均布压力,为0~0.08 MPa。表2为不同气压对应各关节角度,图3为单指软体致动器变形结果。从表2和图3可看出:设计的软体致动器能够达到预期要求,在关节处弯曲,实现屈伸动作;在0~0.08 MPa范围内,手指各关节的转角均随着气压的增大而增大。
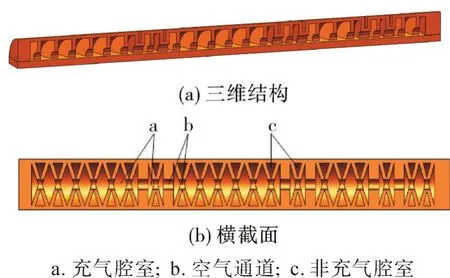
图2 致动器的内部结构Fig.2 Internal structure of the actuator
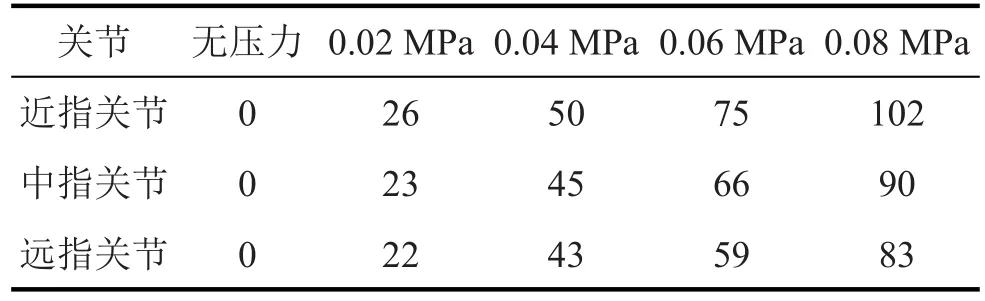
表2 不同气压对应各关节角度,(°)Tab.2 Angles of joint correspond to different air pressures,(°)
3 实验与结果分析
3.1 致动器的制造
设计的单指软体致动器外观为半圆长条形,内部存在间隔的型腔,中路有空气通道。致动器在满足设计要求的前提下,还需制作简单,因此所选的材料为具超高弹性且安全环保的液体硅胶。由于硅胶的高黏度特性和凝固时间有限,模具结构需满足一次性浸满的要求,从而减少液体硅胶充盈模具型腔的时间。为此将致动器的成型分成两步完成,设计的模具如图4,分为A、B、C三部分,模具采用3D打印技术进行制造,不同成型阶段使用不同的模具,最终成型的致动器实物如图5。
3.2 实验平台的搭建
实验平台系统主要包括气泵、控制系统、气压传感器和软体致动器,如图6。气泵选择的是Kamoer公司制造的一种微型真空泵(KVP04);控制系统包括调节真空泵转速的调速驱动板、决定气路通断及转换气路方向的二位三通电磁阀、控制电磁阀工作状态的继电器及arduino单片机;选用的RSCM17100KP101气压传感模块可测试0~101 kPa的气压,并将气压值以模拟电压的方式传递给arduino单片机,从而实现气体压强的反馈,形成闭环控制。软体致动器采用气动,大气环境中的空气通过微型真空泵,由PVC软管经过气压传感器和二位三通阀输送至软体致动器,随着压缩气体的不断充入,软体致动器发生膨胀和弯曲,软体致动器的伸展通过其排气过程实现,恢复过程主要依靠自身材料的弹性。
3.3 实验结果与分析
为与软体致动器变形仿真的结果形成对比,实验过程中控制软体致动器输入的压力依次为0.02,0.04,0.06,0.08 MPa,得到的软体致动器变形情况如图7。图8为各指节弯曲角度的实验与仿真结果。由图7,8可以看出:软体致动器输入压力后,能够在关节处形成弯曲,且各关节的转角均随着气压的增大而增大,范围在0~90°之间,该软体致动器能够完成屈伸的动作,符合人手指的屈伸运动,能够满足手指关节及韧带拉伸的康复训练需求;各指节弯曲角度的实验与仿真结果基本吻合,进一步验证了设计的软体致动器结构的合理性。
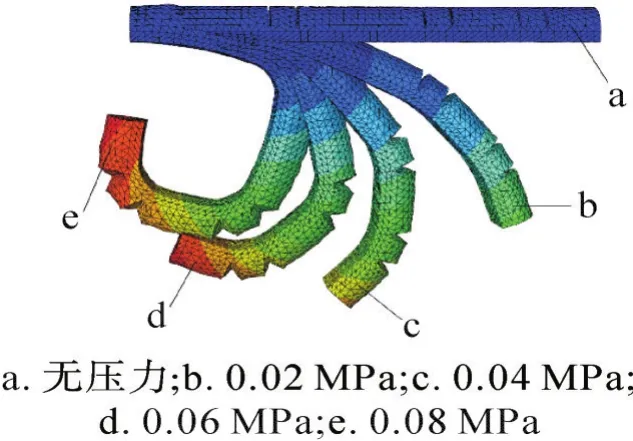
图3 单指软体致动器的变形仿真Fig.3 Deformation simulation of single finger soft actuator
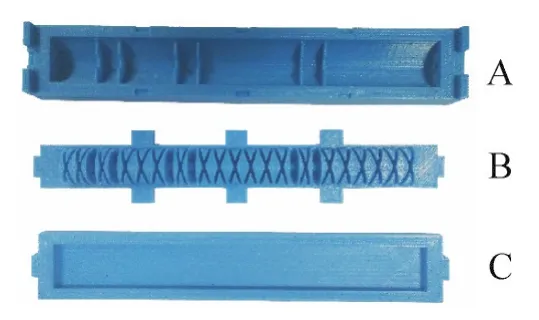
图4 3D打印的软体致动器模具Fig.4 Mold of soft actuator with 3D printed technique
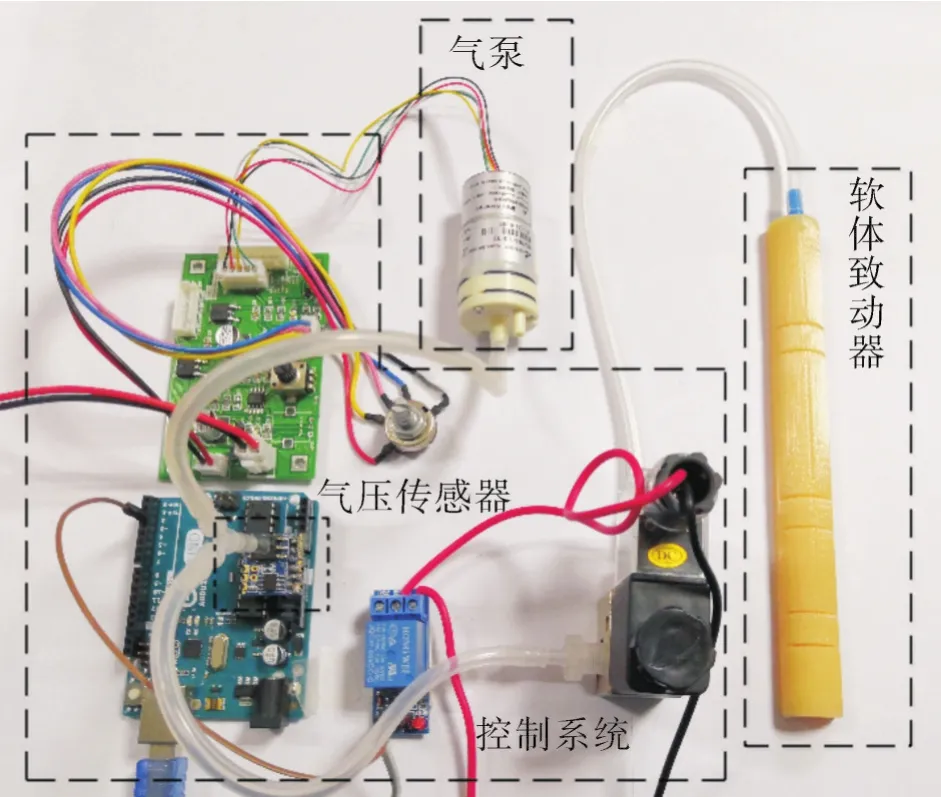
图6 实验平台系统Fig.6 Experimental Platform System
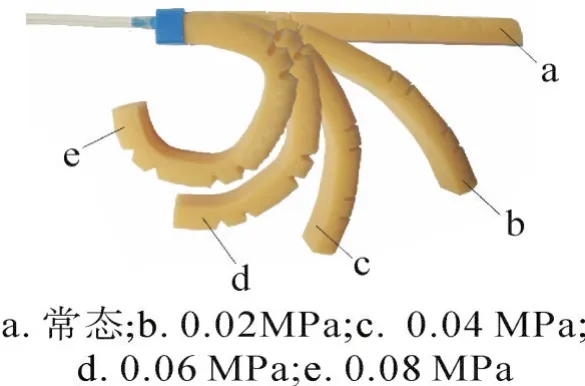
图7 软体致动器实验变形Fig.7 Experimental deformation of soft actuator
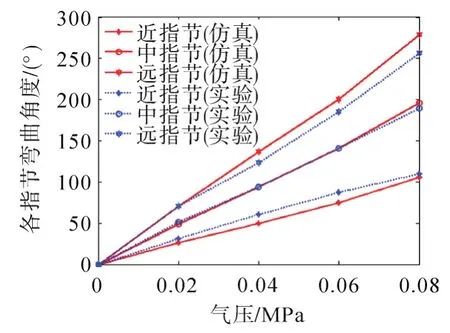
图8 实验与仿真中各指节弯曲角度的对比Fig.8 Comparison of bending angles of knuckles under experiment and simulation
4 结 论
提出一种软体致动器的新结构,主要用于手指康复训练的康复机器手,基于仿真分析和实验研究得出如下主要结论:
1)该软体致动器外观设计合理,符合手指的生物学特征;
2)该软体致动器内部空腔网络结构设计合理,能够完成屈伸动作;
3)该软体致动器的各关节动作幅度能够通 过调节气压进行调节,各关节弯曲角度在0~90°之间,能够满足手指关节及韧带拉伸的康复训练需求。
猜你喜欢
陕西科技大学学报(2022年5期)2022-10-13
燕山大学学报(2022年4期)2022-08-01
环球时报(2022-04-28)2022-04-28
幼儿画刊(2021年5期)2021-12-02
军事文摘·科学少年(2021年6期)2021-06-24
上海交通大学学报(2021年2期)2021-03-02
军事文摘(2020年24期)2020-11-29
工业设计(2020年3期)2020-05-14
模具制造(2019年4期)2019-06-24
人生与伴侣·共同关注(2018年3期)2018-03-23