一种提取LOFAR图中谱线的方法
2018-07-10 07:16陈敬军马珂蔡潇
声学与电子工程 2018年2期
陈敬军 马珂 蔡潇
(海军驻上海地区电子设备军事代表室,上海,200233)
提高提取 LOFAR(Low Frequency And Recording)图中谱线的能力,对被动声呐的目标检测跟踪和分类识别具有重要的意义[1-3]。在低信噪比情况下成功提取出LOFAR图中的谱线面临多方面的挑战:一是要提取出低信噪比的谱线,必须选择低的检测门限,由此导致的过多噪声点不易剔除;二是存在信号和背景起伏以及宽带干扰等情况,导致LOFAR图中的谱线时明时暗,甚至在谱线中间也会出现许多断点;三是信号和噪声的动态范围都比较大,即使对应同一目标的LOFAR图,也经常会出现多根强弱谱线并存的情况。
LOFAR图中的谱线提取问题从上世纪40年代中期LOFAR图出现就开始研究。自上世纪80年代开始到现在,LOFAR图中的谱线自动提取问题又吸引了更多具有图像处理、人工智能和统计信号处理等领域背景的学者的广泛关注[1-19]。Thomas A Lampert等人将 LOFAR图中的谱线提取问题看作是周期图中的轨迹检测问题,根据与成功应用有关的一系列准则对轨迹检测算法进行了综述,并指出尚未有一种算法满足所有的准则[16]。这些准则包括算法应对背景噪声的变化、轨迹的强弱变化、轨迹频率变化的能力,分辨距离很近轨迹的能力,低信噪比下的轨迹检测能力,是否需要轨迹的起止时间等先验信息,以及算法的计算量大小等。LOFAR图中的谱线提取问题从上世纪中期到现在一直是一个值得深入研究的课题。
观察LOFAR图,即使在很低的信噪比下,人仍然可以很容易地从许多噪声点的LOFAR图中提取出谱线。本文模拟人工提取谱线的过程,给出了自动提取LOFAR图中谱线的算法。
1 人工提取谱线过程分析
在声呐信号处理中,LOFAR图是一个M×N的二维图像,x轴表示频率,y轴表示时间,亮度表示幅度。在信噪比较高时,窄带信号在一个时刻的谱在频率-幅度平面上是一线状谱,简称线谱。在LOFAR图中,当信号较强时,在某一时刻与窄带信号对应的时间-频率点上就会出现一个亮点;由于同一窄带信号在相邻时刻的频率变化不会很大,由对应同一窄带信号的多个时刻的亮点就形成了一条清晰的亮线,即谱线。
人之所以有很强的谱线提取能力,首先是由于人眼具有很强的模式识别能力,会自动利用谱线和噪声以及宽带干扰等在时间-频率平面上表现出来的形状上的差异,其次是由于人眼具有视觉积累功能,能够累加利用多个时刻的谱值信息。人在判断是否是谱线上的点的过程中充分利用了谱线的形状特点:除了窄带信号在单个时刻的谱的形状,还有其在时间上的连续性。另外,人在谱线提取过程中,一旦判定谱线存在,会自动连接谱线上的断点。
为了模拟人工从LOFAR图中提取谱线的过程,本文将谱线提取过程分成两步完成:第一步,对LOFAR图上的全部点进行线谱识别,只保留识别出的线谱点;第二步,进行线谱跟踪,统计线谱出现次数,根据线谱跟踪结果,判断是否有谱线存在,提取出属于谱线上的线谱点,并自动连接谱线上的断点。
2 线谱峰值识别
线谱识别主要利用了窄带信号对应的线状谱的形状特点:(1)线谱频率一般出现在谱峰尖位置,对应的谱值是谱峰范围内的局部极大值;(2)线谱有一定的高度;(3)线谱宽度较窄。
根据线谱形状的以上特点,线谱识别分三步实现:
(1)按频率从低到高找出局部最大点。局部最大点的判断条件是其谱值比其两侧的值大,一旦条件满足,k点即是局部最大点。
(2)对局部最大点的谱值和对应的噪声均值大小判断是否满足:

其中Xk为k点的频率值;μk是k点的噪声均值估计值;d0为第一个检测门限。
(3)计算超过门限的局部最大点谱峰宽度,与线谱宽度门限D比较,只保留谱峰宽度小于设定线谱宽度门限的局部最大点的谱值,并将其余点谱值置零。
按照上述处理方法,对LOFAR图中每一行的谱进行线谱识别。经过线谱识别处理后,LOFAR中所有的谱值非零点对应的是识别出的线谱点。对窄带信号而言,kd的平方与LOFAR处理的输入信噪比成正比,比例关系与计算LOFAR图时谱估计的傅立叶变换的长度、时间窗、数据重叠程度、采样速率等因素有关[2-3]。检测门限d0的取值直接关系到谱线提取能力的强弱。若只提取信噪比高的谱线,可以选择较高的检测门限;提取低信噪比的谱线,需选择较低的检测门限d0,从而保证留下足够多的弱谱线上的点。
3 谱线点提取
经线谱识别处理后的谱值非零点,部分是由窄带信号形成的谱线上的点,部分是满足了线谱识别逻辑的噪声点。线谱识别充分利用了线谱的形状特点,谱线可看作是LOFAR图中自某一时刻开始到后某一时刻结束的一条路径。经线谱识别处理后,由窄带信号形成的谱线路径和噪声路径上识别出的非零点谱值数量是不同的,前者大于后者。在线谱识别后,可以进行线谱跟踪,根据多个时刻的线谱识别情况来提取出谱线上的点。
由于事先不知道谱线的根数和起止时间,在进行谱线提取时,我们先利用M个时刻的谱值信息来判断是否存在谱线。统计M个时刻线谱识别情况可以通过目标跟踪技术来实现。人通过观察LOFAR图提取谱线时,一旦判断谱线存在,即使是在谱线中间的断点,也会认为相应的时刻存在线谱。由于存在谱线中间出现断点和谱线已经真正结束两种情况,在进行线谱跟踪时并不是在某一时刻跟踪不到线谱就立即结束跟踪,而是连续多个时刻都没有跟踪到线谱,大于允许丢失的时刻数L时,线谱跟踪才终止。若线谱跟踪过程中出现的线谱次数P大于设置门限M0,则判定谱线存在,对应的线谱点是谱线上的点,一旦判断谱线存在,则可以继续提取出整条谱线上的点。具体的谱线提取过程如下:
(1)从第一行开始按频率从小到大搜索谱值非零的线谱点,若搜索到线谱点,则执行(2);若搜索到行尾则继续搜索下一行,全部搜索结束执行(4)。
(2)从搜索到的线谱点开始进行线谱跟踪,统计线谱出现次数。若相邻时刻跟踪波门内出现线谱,选择与估计的跟踪中心最近的线谱点继续跟踪,线谱数增加 1;否则以估计的跟踪中心开始继续跟踪。线谱跟踪处理了M个时刻的数据或者连续无线谱次数大于L,线谱跟踪结束。
(3)若线谱跟踪过程中出现的次数大于设置门限M0,就认为该线谱点是属于谱线上的点,则继续线谱跟踪和判决过程直至提取出整条谱线上的所有点,保存提取出的谱线上的点的位置等信息。
(4)所有非谱线上的线谱点置零,重新显示谱线上的线谱点,并自动连接谱线上的断点。
4 试验数据分析
为了验证算法的有效性,我们将其用于提取图1(a)LOFAR图中的谱线,图中用亮度表示了谱值的大小。图 1(b)中的亮度表示的谱值是去除宽带噪声分量后的值。如果LOFAR图已经进行了背景均衡处理,在进行线谱识别时直接将其值同门限比较即可。图1(c)表示线谱识别结果,所有识别出的谱值非零点全部用黑点表示,从图中可以看出存在许多噪声点。图 1(d)中,谱线中间的断点已经自动连接完毕。从处理结果看,本文给出的算法能够成功地提取出LOFAR图中的谱线,结果和人工提取是一致的。
在影响谱线提取能力的各种因素中,检测门限d0的值可由窄带信号检测所要求的检测概率和虚警概率事先确定[3]。跟踪波门的宽度决定了要提取的谱线的最大频率变化率, 谱宽门限D定义了线谱的宽度,M与谱线的最小长度有关,L确定了谱线结束的判断准则。当检测门限为d0时,检测概率大于M0/M的窄带信号,其谱宽和频率变化率又没有超出谱宽门限D和跟踪波门的约束,其所对应的谱线就会被成功提取出来。在图1中,算法中所用的参数如下:线谱跟踪波门宽度为 5,谱宽门限为D=5,d0=1,M=20,L=5,M0=9。
为了便于分析算法的处理效果,图2给出了图1谱线提取过程中各时刻的线谱识别后的初始线谱数、剔除的噪声点数、连接的谱线上的断点数,以及谱线数。

图1 某海上目标的LOFAR图及其谱线提取结果

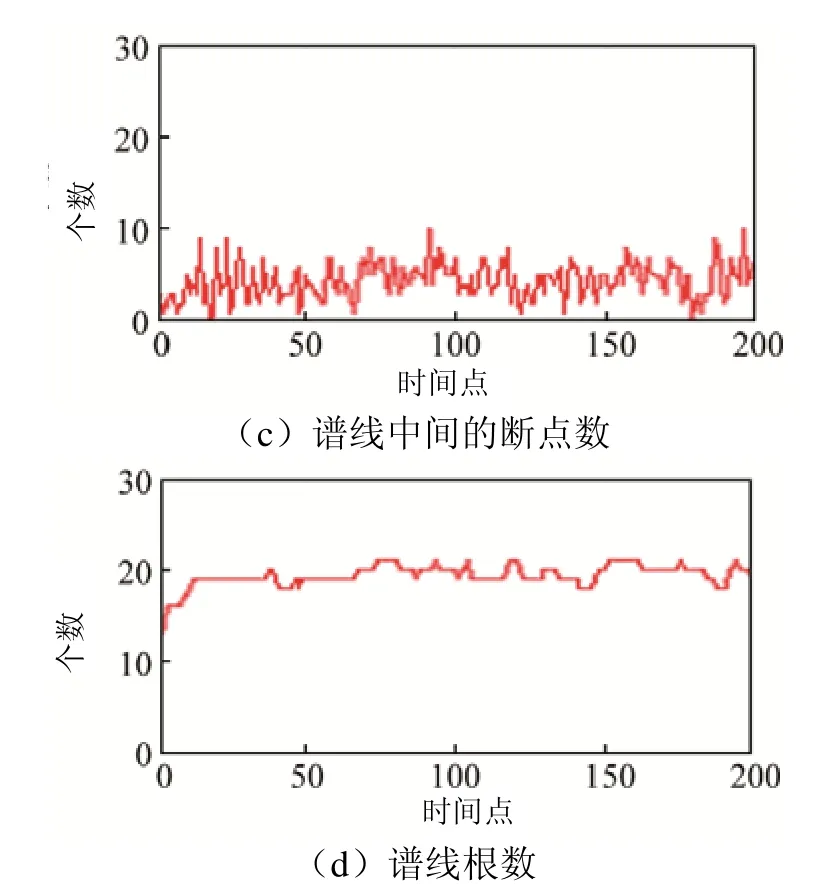
图2 线谱识别后各参数
图2(d)表示图1(d)中各个时刻谱线的根数。谱线提取过程是提取出谱线上的点,若用图 2(a)中最初识别出的线谱数减去图2(b)中的噪声点数就能得到各时刻提取出的谱线上的线谱点数。可以看出,最初线谱识别处理保留下来的谱值非零点包含了许多噪声点,谱线中间也存在许多断点。通过提取出谱线上的点,剔除噪声点,并连接好谱线中间的断点,降低了噪声和谱线上的断点对谱线提取过程的影响。在谱线提取过程中,每一个时刻剔除的噪声点数都比较多,说明该算法在低信噪比情况下可以成功地提取出LOFAR图中的谱线。
5 结论
本文给出的谱线提取方法模拟了人工提取谱线的过程,整个方法具有提取谱线能力强、所需信息少、计算量小的优点。该方法不仅可用于LOFAR图提取目标窄带信息,还可直接用于DEMON图提取宽带调值信息,稍作修改后还可用于宽带目标检测,使算法还具有应用范围广的特点。
本文中的谱线提取方法在实现过程中已经利用了窄带信号的谱信噪比高、宽度窄和多个时刻存在的特点来提高谱线提取能力。后续还可以进一步利用谱线上的点提取出信噪比、信号起伏、频率变化等特征,并利用这些特征进一步提高谱线提取质量和算法的宽容性。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
应用声学(2020年2期)2020-06-08
——以大庆长垣萨尔图油田为例
石油地球物理勘探(2019年6期)2019-12-06
电脑报(2019年20期)2019-09-10
初中生世界·九年级(2019年6期)2019-08-15
山东冶金(2019年1期)2019-03-30
电子制作(2017年19期)2017-02-02
通信电源技术(2015年6期)2015-03-15
舰船科学技术(2015年8期)2015-02-27
电视技术(2014年19期)2014-03-11