LTE网络中基于最大似然估计的协作定位方法
2018-07-27 05:40刘帅
微型电脑应用 2018年7期
刘帅
(商丘职业技术学院, 商丘 476100)
0 引言
在长期演进(Long-Term Evolution,LTE)[1]网络中,确定用户设备(User Equipment,UE)的位置具有重要意义。现代移动设备能够通过全球卫星导航系统(Global Satellite Navigation System,GNSS)接收机独立定位。GNSS是指任何具有全球覆盖的基于卫星的定位系统,如美国NAVSTAR全球定位系统(GPS)和俄罗斯GLONASS。定位时,GNSS接收机必须先进行卫星搜索,其目的是为了获得至少4颗卫星的信号。在可见度低的密集环境中(如室内或森林地区),任何基于GNSS的定位技术将会不可靠。因此,对于LTE网络,开发新的定位技术,如基于蜂窝的定位技术尤为重要[2]。蜂窝定位的目的是通过在网络中获得的噪声测量确定UE的位置。在蜂窝定位中,通常有少量的eNodeB(长期演进系统中的基站)和许多未知的、待确定的基站。通常情况下,网络中收集数据方式要么是基于范围的,如到达时间(TOA)、到达时差(TDOA)和信号接收强度(RSS);要么是基于角度的,如到达角(AOA)。当前的LTE支持3种定位技术,分别是E-CID、A-GNSS和OTDOA。
在LTE规范中,3GPP支持两种独立的TDOA定位方法(下行链路和上行链路)。为了使用双曲三边测量计算UE位置,LTE中下行链路定位又称作观测的到达时间差(OTDOA),用以测量UE处来自多个eNodeB的下行链路信号的到达时间差,常用的是蜂窝特定参考信号(CRS)和定位参考信号(PRS)。LTE中上行链路定位方法又称作上行链路到达时间差(UTDOA),它在概念上与OTDOA相同,其差别是,它的定时测量是从产自UE或在邻近eNodeB处接收的信号中进行。
常用定位方法可以分为两类:非协作式和协作式[3-4]。在非协作式定位中,UE只与eNodeB通讯,为了确保每个UE连接到足够数量的eNodeB进行定位,需要高密度的eNodeB和更长的通讯范围,当前的蜂窝通信网络采用非协作定位方法。可访问的eNodeB数量有限和通信范围较短导致出现协作定位,在协作定位中,UE不但与eNodeB进行通讯,还互相进行通讯。UE中的协作提供了额外的测量,这些测量缓解了eNodeB的密集部署。协作定位算法可以分为两类:集中式和分布式[5]。在集中式定位中,中央处理器收集所有测量信息并对这些测量信息进行分析,同时估算网络中的UE位置,接着将位置报告给请求实体。集中式算法在大型网络中并不常用。在分布式定位中,设备估计每个UE的位置并将其报告给网络。分布式算法在大的网络中更受欢迎。然而,集中式算法通常比分布式算法能提供更精确的位置估计。
本文研究了LTE系统中的协作定位。本文假设eNodeB为同步的,且OTDOA测量是通过UE获得的。UE还可以互相通信并收集测量信息。本文在3GPP中讨论了设备到设备(D2D)通信,该设备到设备通信允许UE使用蜂窝资源而非通过eNodeB在直接链接上互相传播数据信号。因为UE不同步,所以UE-UE连接考虑往返时间(RTT)测量。本文介绍了协同定位的测量模型,并利用相应的最大似然估计进行定位。
1 系统模型
假设LTE网络具有M个eNodeB,N个UE。用A={N+1,…,N+M}表示eNodeB的集合,B={1,…,N}表示UE的集合。令Yi=[xi,yi]T∈R2,i∈A为eNodeB的第i个已知坐标,Xk=[xk,yk]T∈R2,k∈B表示UE的第k个未知坐标。在协作蜂窝定位中,每个UE有两组测量:UE-eNodeB和 UE-UE测量。本文第k个UE定义两个集合,如式(1)。
Ak={i∈A|eNodeBi连接到UEk}
Bk={i∈B|eNodeBi连接到UEk}
(1)
式(1)中,前者和后者分别定义UE-eNodeB和UE-UE连接。UE表示多个eNodeB和参考eNodeB之间的时间差,也就是OTDOA。服务eNodeB(到UE最近的eNodeB)通常用作参考eNodeB,本文假设eNodeB是同步的。接着使用时间差测量来获得距离差测量,如式(2)。
(2)
(3)
3 距离差测量值的平滑优化
利用卡尔曼滤波[8]对获得距离差测量值进行平滑优化,以减小外部环境的影响。用X表示距离差测量值,用线性微分方程组表示滤波模型如式(4)。
X(t|t-1)=C×X(t-1|t-1)+D×U(t)
(4)
式(4)中,X(t-1|t-1)表示前一状态的最佳值,X(t|t-1)表示根据前一状态预测的现今状态的状态值,U(t)表示现今状态的控制变量,如果该变量不存在,则为0,C、D为系统参数。当滤波模型需要更新时,用P代替其协方差如式(5)。
P(t|t-1)=C×P(t-1|t-1)×C′+Q
(5)
式(5)中,P(t-1|t-1)表示X(t-1|t-1)的相对的协方差,P(t|t-1)表示X(t|t-1)的相对的协方差,Q表示滤波模型的噪声,C′是C的转置。由式(4)、式(5)可以计算出现今状态的预测值,结合现今状态的测量值,可以计算出现今状态的最佳值如式(6)。
X(t|t)=X(t|t-1)+Tg(t)(Z(t)-L×X(t|t-1))
(6)
式(6)中,Z(t)表示现今状态的预测值,L表示滤波模型的参数,Tg(t)表示卡尔曼增益,如式(7)。
Tg(t)=P(t|t-1)L′/(L×P(t|t-1)L′+K)
(7)
式(7)中,L′是L的转置,由以上滤波过程可以得到k状态时的最佳值X(t|t)。在滤波过程中,t状态时的最佳值的协方差P(t|t)必须不断更新其自身值,直到滤波的结果达到或接近阈值。P(t|t)可以表示式(8)。
P(t|t)=(I-Tg(t)×L)×P(t|t-1)
(8)
式(8)中,I是值为1的矩阵。随着滤波模型的不断迭代,当其由前一状态进入下一状态时,P(t-1|t-1)会自动更新为P(t|t)。
4 最大似然估计


(9)

式(9)中的问题为非线性的,通过高斯-牛顿(G-N)算法可以对其进行近似求解[11]。在G-N算法中,使用成本函数全局最小值周围的一阶泰勒级数线性化非线性成本函数。因为全局最小值是未知的,所以从初始点开始,该算法迭代地找到最小值。利用以下GN算法可以近似地求解式(9)中的最小值问题,如式(10)。

(10)

5 仿真分析
本文仿真参数,如表1所示。
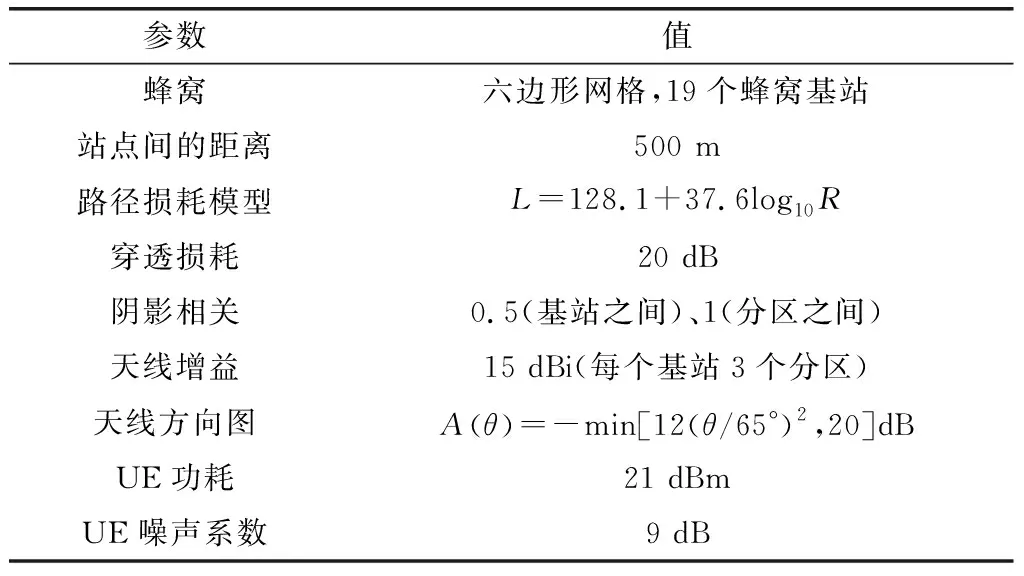
表1 仿真参数
5.1 可定域性
可定域性是指UE被唯一定位的能力,主要取决于UE的连接性。相对于SINR阈值和协作者数量的定位性能,如图1所示。
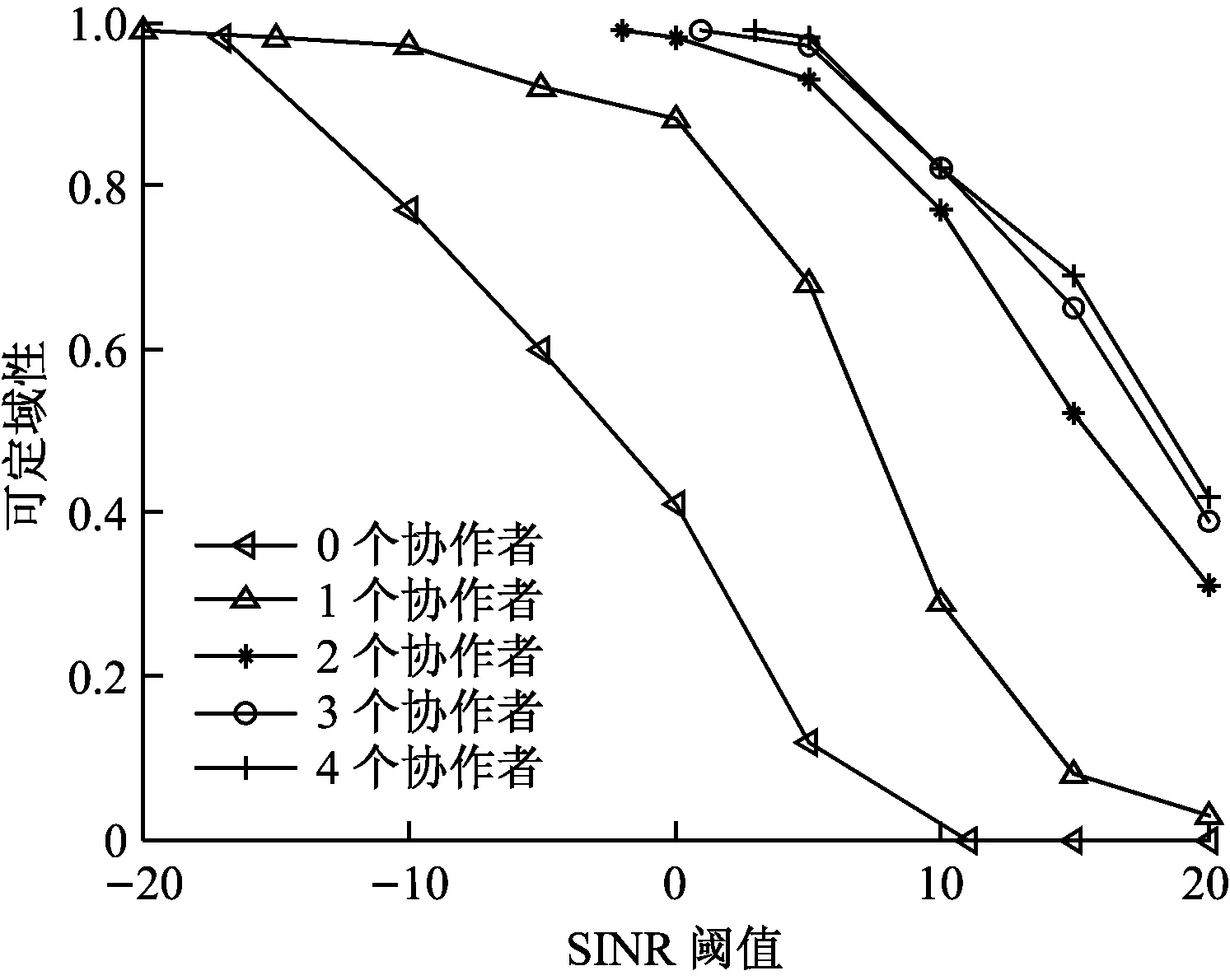
图1 不同SINR阈值下的定位性能
绿色(左1)曲线表示没有协作应时网络的性能,它与非协作网络的性能一致。对于CRS,LTE网络中SINR探测器阈值的主要变化范围为-6至-14 dB。当阈值为-6 dB,则UE被定位的概率为60%。其主要原因是LTE 9中设计了特殊的定位子帧。随着协作者数量增加,其相对改进性能降低。如果UE与1或2个其他UE协作,则会有较大的增益。
5.2 定位精度
协作定位的另一个重要好处是提高了定位精度,如图2所示。
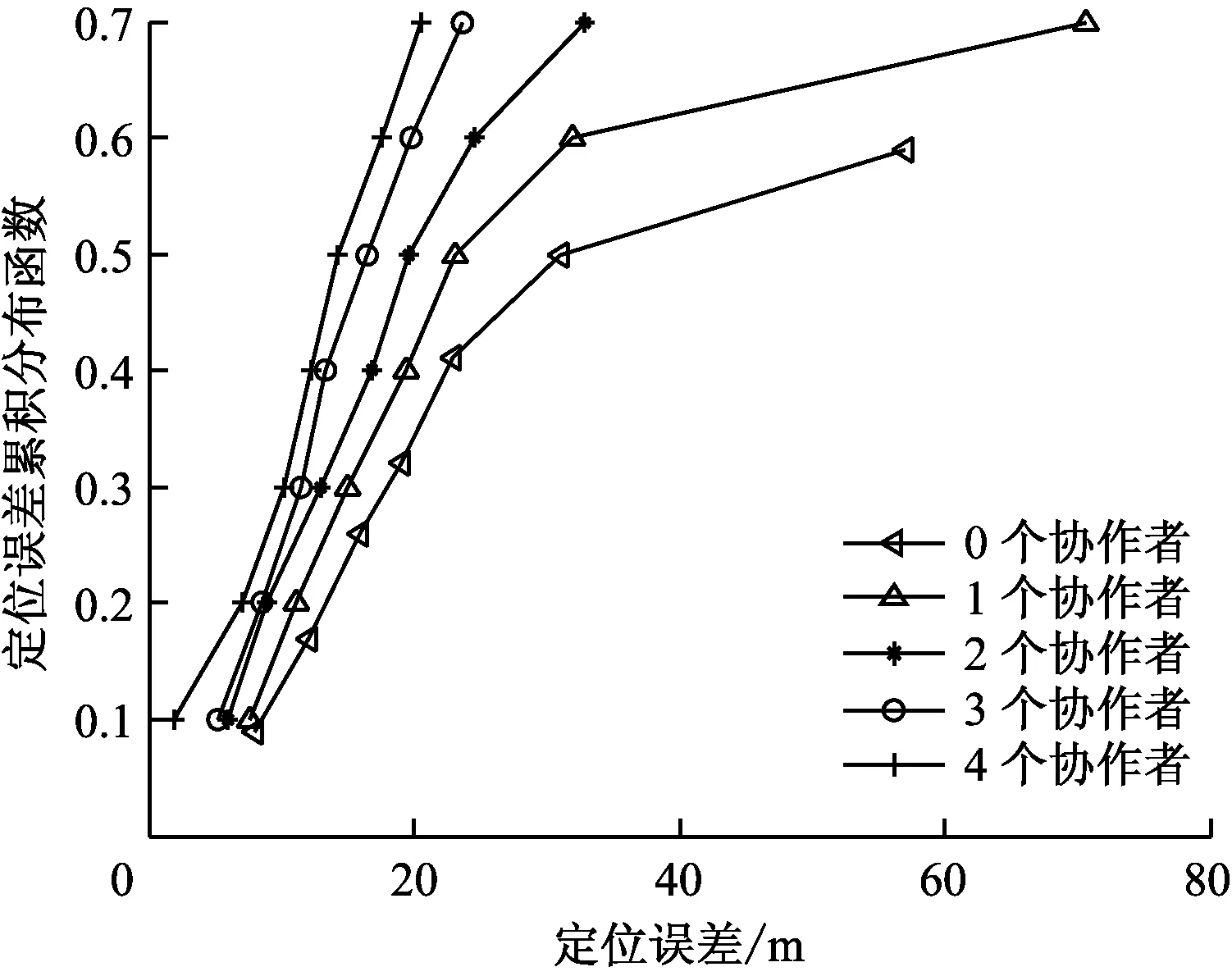
图2 定位误差累积分布
相对于协作者数量的定位误差累积分布函数(CDF),其中,零个协作者表示非协作的情况。本文将SINR阈值固定在-6 dB处。非协作定位的性能不如协同定位的性能,其原因主要有3个。首先,UE可能没有连接到3个eNodeB;其次,UE到eNodeB至少有3个连接,但是它们可能有不规则的几何形状;最后,测量噪声可能非常大。在本文研究中,协作定位很容易克服这些问题。当使用CRS测量时,通过增加协作者的数量,定位精度显著提高。其主要原因是,本文算法的协作网络中, UE拥有更多有效的连接,其定位估计的精度将更好。
6 总结
本文研究了LTE系统中的协作定位,提出一种长期演进系统中的协作定位方法。本文算法中,将OTDOA测量方法用于UE-eNodeB连接,而RTT测量方法用于UE-UE连接。为了展现协作定位的优势,本文进行了计算机仿真,结果表明,相比于非协作定位,UE中的协作定位可以显著提高LTE网络的定位能力和定位精度。
猜你喜欢
移动通信(2021年5期)2021-10-25
现代装饰(2021年1期)2021-03-29
空间科学学报(2020年3期)2020-07-24
四川冶金(2019年5期)2019-12-23
作文成功之路·小学版(2019年8期)2019-09-18
人大建设(2019年4期)2019-07-13
小学生学习指导(低年级)(2019年4期)2019-04-22
知识就是力量(2018年3期)2018-03-08
读者(2017年14期)2017-06-27
中国交通信息化(2014年3期)2014-06-05