伸缩式机械手结构分析与研究
2018-08-17 06:12严雪冬张武学
电子工业专用设备 2018年4期
严雪冬,张武学
(中国电子科技集团第四十五研究所,北京 101601)
单晶硅太阳能电池是当前广泛应用的一种太阳能电池,不同行业和领域的电池片尺寸各不相同,故需进行相应的变型设计来实现高效稳定的印刷。伸缩式机械手是印刷电池片传输的重要部件,其工作时,通过机械手臂深入电池片底面,经过两根平皮带移动,将存放在料盒中的电池片取出,然后随两根同步运行的平皮带移动到下一个工位。料盒间歇下降1个片距,平皮带连续转动进行传片,直到料盒中的电池片全部传出,整个过程要求取片的速度均匀且电池片移动不能有太大偏斜。
1 伸缩式机械手主要结构
伸缩式机械手主要包括机械手臂、机械手臂驱动机构和印刷电池片传输机构三部分,其主体结构如图1所示,采用2个电机分别独立控制驱动和传输机构。
1.1 机械手臂
如图2所示,直线导轨安装在导轨底板上,起导向作用,连接板与直线导轨滑块固定连接,上托板与连接板通过内六角螺钉连接。

图1 伸缩式机械手主体结构图
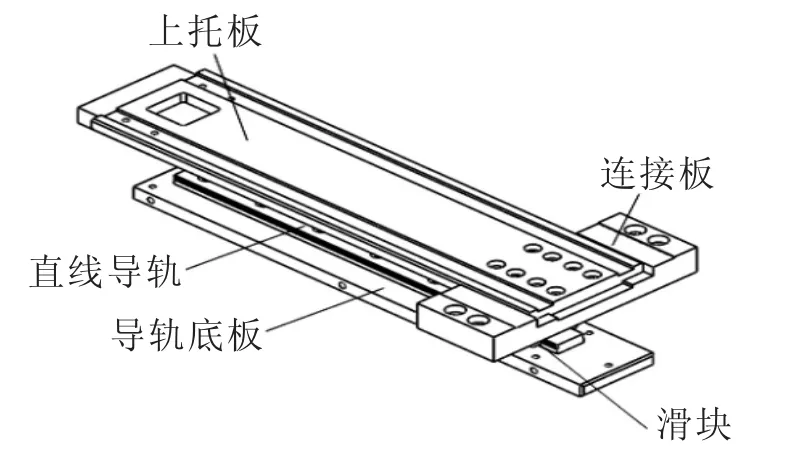
图2 机械手臂示意图
1.2 机械手臂驱动机构
机械手臂驱动机构工作原理如图3所示,电机带动同步带轮旋转,驱动架随同步带左右移动,依靠电机架左移张紧同步带。电机安装在电机架上,电机架通过内六角螺钉与前立板固定连接,通过下压带板,将水平同步带与驱动架固定,水平同步带另一端装有惰轮,惰轮通过惰轮轴与惰轮轴座固定连接。

图3 机械手臂驱动机构主体示意图
1.3 印刷电池片传输机构
电池片传输机构主要包括平皮带,主体框架,传输机构主体和相关连接、张紧结构。
1.3.1 平皮带
平皮带选用聚酯纤维材质,高伸缩性无缝编布环状结构,绕行如图4所示。

图4 平皮带绕行示意图
1.3.2 主体框架结构
前后立板与底板、固定板和导轨底板,通过内六角螺钉进行固定连接,形成口字型框架结构。底板和固定板留有定位凸台,方便主体框架装配,并且能够保证前后立板的间距,如图5所示。
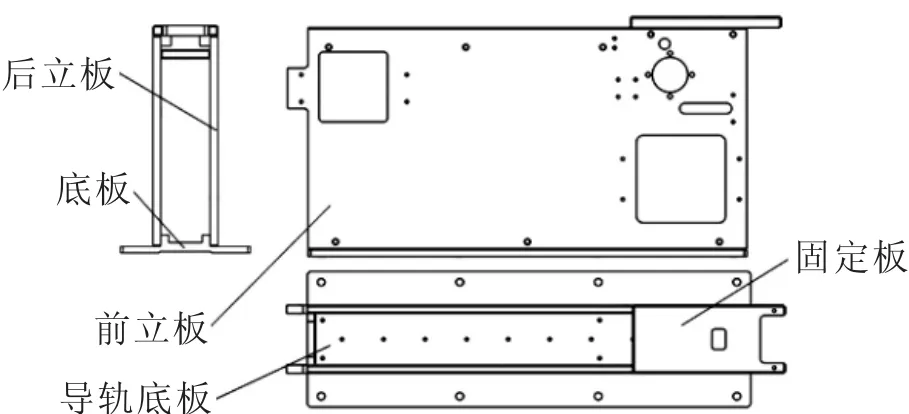
图5 主体框架结构示意图
1.3.3 印刷电池片传输机构主体
电机2驱动带轮旋转,通过同步带驱动主动轴旋转,安装在主动轴上的平皮带轮,利用摩擦力,带动绕在后平皮带轮、前小带轮、中小带轮、平带轮、张紧带轮上的平皮带,主同步带通过电机板向下运行张紧,图6为传输机构主体示意图。
1.3.4 平皮带的张紧
张紧座固定在前后立板内侧面,张紧轴在前后立板长槽内滑动,通过调节安装在张紧座孔内的张紧螺钉,向右拉动张紧轴,带动张紧带轮向右移动,张紧平皮带,图7为平皮带的张紧结构示意图。
2 料盒
料盒一般由用户根据印刷工艺需求定制,印刷电池片不同,工艺流程不同,料盒结构和尺寸不尽相同,图8为印刷电池片用料盒示意图。
3 伸缩式机械手工作原理
料盒连续上升或下降时,机械手臂处于收缩状态;当料盒到达取片位置后,机械手臂伸入料盒内部,电池片与平皮带上面接触,随平皮带向右移动。料盒下降一个设定间距,进行下一片传输,直至最后一片完成传输,机械手臂收缩,如图9所示。

图6 传输机构主体示意图
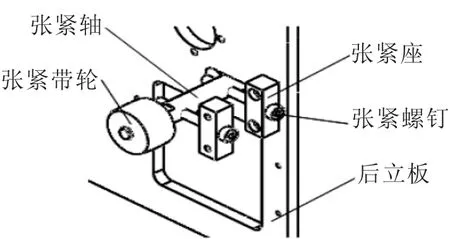
图7 平皮带的张紧结构示意图

图8 料盒示意图
3.1 机械手臂伸出
电机1带动同步带轮逆时针旋转,驱动架随水平同步带一起向左移动,机械手臂伸出,如图10所示。
3.2 机械手臂收缩
电机1带动同步带轮顺时针旋转,驱动架随水平同步带一起向右移动,机械手臂收缩,如图11所示。
3.3 平皮带运动
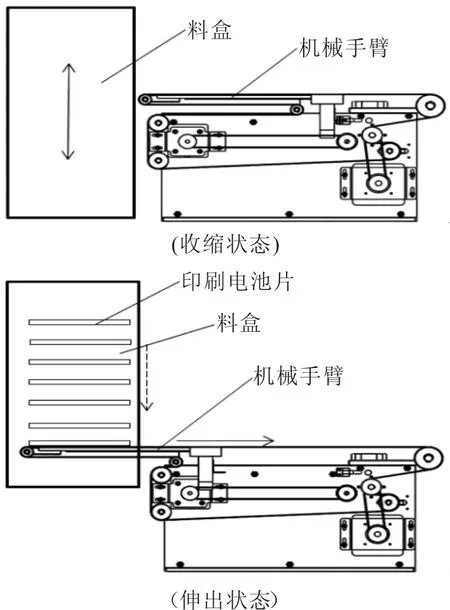
图9 伸缩式机械手工作原理示意图
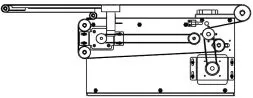
图10 机械手臂伸出
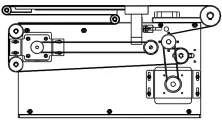
图11 机械手臂收缩
电机2驱动同步带轮,通过同步齿形带,带动平皮带轮同步旋转。利用平皮带与带轮之间产生的摩擦力,带动绕在后平皮带轮、前小带轮、中小带轮、平带轮、张紧带轮上的平皮带移动。
4 伸缩式机械手结构设计
4.1 平皮带长度计算
已知条件:机械手臂行程150 mm,平皮带宽度10 mm,厚度1 mm。机械手伸出和缩回状态,平皮带长度相同,经计算,平皮带内周长度为1 395 mm,考虑到平皮带有5%的标准拉伸率,按照经验,平皮带内周长度1395·(1-4%)=1339 mm,按照平皮带长度标准,选取长度1 347 mm。
4.2 水平同步带长度计算
选用S3M同步齿形带,宽度10 mm。同步带轮齿数20,节圆直径Dp1=19.1 mm,带轮中心距C=200 mm,同步带长度L=πDp1+2C=459 mm,选用同步带周长459 mm。
4.3 主同步带长度计算
选用S3M同步齿形带,宽度10 mm。同步带轮齿数22,节圆直径DP2=20.1 mm,带轮中心距C=76 mm,同步带长度L=πDP2+2C=216 mm,选用同步带周长219 mm。
4.4 伸缩机械手的动作控制
采用3个光电开关来检测和判断相应位置,控制机械手的工作状态,如图12所示。在上托板左端方孔内,设置光电开关1,用于检测料盒内有无印刷电池片;在前立板上,安装光电开关2,通过光电弯板检测机械手臂是否复位;在固定板上安装光电开关3,判断印刷电池片是否从料盒传出,到达指定位置。
5 伸缩式机械手使用范围扩展
目前设计的伸缩式机械手,适用于156 mm×156 mm尺寸硅片的太阳能印刷线,当电池片尺寸改变时,需要对其进行相应的调整,进行变型设计。
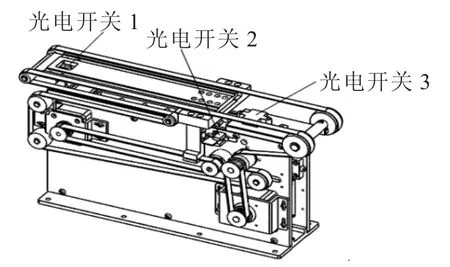
图12 伸缩机械手的位置开关
5.1 小尺寸电池片
印刷小尺寸电池片时,机械手平皮带的宽度、长度和间距尺寸需要相应的减小,整体框架随之进行调整,如图13所示。

图13 小尺寸电池片机械手
5.2 带框电池片
印刷带框电池片时,平皮带间距要加大,且要求框边与平皮带接触,保证正确印刷;印刷大尺寸电池片时,要增加机械手行程,相应增加平皮带长度,水平同步带长度也要增加。同时前后立板长度尺寸也要相应加长。
5.3 长条型基片
印刷长条型基片时,平皮带间距要加大,为保证基片传输稳定,平皮带间距一般为印刷基片长度的1/2左右,如图14所示。
6 结束语
本文介绍的伸缩式机械手的机械结构,加工性能良好,装配简单,缩短了设计周期,在实际工作中已经得到验证,为今后的设计搭建了很好的平台。伸缩式机械手在实际应用中,稳定性高,提高了印刷的可靠性和稳定性,对伸缩式机械手的变型设计,拓展了丝网印刷的应用领域。
猜你喜欢
粮食加工(2022年6期)2022-12-02
长春大学学报(2021年4期)2021-05-17
数学小灵通(1-2年级)(2020年9期)2020-10-27
当代贵州(2019年41期)2019-12-13
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
中国共青团(2015年7期)2015-12-17
河南科技(2014年11期)2014-02-27